基于MATLAB/Simulink的电动汽车再生制动仿真*
2019-05-09宫唤春
宫唤春
(燕京理工学院)
电动汽车的电动机在断电后,在其本身及所带负载的惯性作用下会旋转一段时间后才停止运转。因此,利用电动机制动过程中的剩余能量回收,为车载电源系统充电,从而保证电动汽车的续驶里程已经成为研究的热点问题。通常,再生制动只能起到限制电动机转子速度过高的作用,即不让转子的速度比同步速度高出很多,但无法使其小于同步转速[1],即再生制动仅能起到稳定运行的作用。因此,电动汽车的制动方式应考虑机械制动和电力制动2种类型的结合,尽可能多地用再生发电方式取代机械式制动。文章通过利用MATLAB/Simulink软件,分析再生制动与制动防抱死系统(ABS)联合制动的模糊-PID 复合控制策略。
1 再生制动系统建模
再生制动发电系统的发电电压一般总是低于蓄电池电压,因此为了使再生制动发电系统发出的电能充入蓄电池,必须采用专门的控制系统,使电动机工作于再生制动模式[2]。图1 示出电动汽车制动能量再生系统的电路示意图。
制动能量再生的具体过程分为3 个阶段。
1)续流阶段。此时电动汽车开始减速,控制T1和T2断开,电动机电感中的电能经L—R—D2消耗一部分。根据克希荷夫定律,电路满足式(1):

其中:E=ken0
式中:i——回路电流,A;
E——电动机电势,V;
ke——电机转矩系数;
n0——续流阶段电动机转速,r/min;
i0——开始再生制动时回路的电流,A;
t——时间,s。
2)电流反向阶段。由于电动汽车的惯性,电动机继续同向运转,电动机处于发电状态,电流方向为M—C0—R2,由于T2的开关频率较高,可近似认为此时电动机转速不变,则此阶段结束时回路中电流(ion/A)为:

其中:E=ken1
式中:n1——电流反向阶段电动机转速,r/min;
i1——电流反向阶段开始时回路中的电流,A;
Ton——T2导通时间,s。
3)再生充电阶段。此时,控制开关T2断开,由于L的续流作用,电流通过D1向电池充电,可得充电电流(ic/A)的计算式:

式中:UL——蓄电池电压,V。
设T2的关断时间为Toff,则此阶段向电池的充电电能(W/kJ)为:

此后,电动机反复工作于电流反向和再生充电阶段,直至驾驶员踩下加速踏板或电动汽车停止行驶。
2 再生ABS 制动系统建模
为简化研究问题,采用单轮汽车模型进行分析,如图2 所示,忽略空气阻力和车轮滚动阻力[3]。

图2 单轮汽车受力模型
建立车辆动力学方程:


再生制动力矩:

式中:I——车轮转动惯量,kg·m2;
φ——地面附着系数;
Fe——再生制动力,N;
Kg——电机到驱动轮的传动比;
Kt——电机转矩系数;
im——电枢电流,A。
3 再生-ABS制动仿真模型的建立
3.1 再生制动与ABS联合制动的控制策略
当电动汽车不采用紧急制动,即制动踏板踩下较小时,电动汽车仅需要再生制动即可满足制动要求;当紧急制动时,再生制动与ABS 制动系统同时工作。再生-ABS 联合制动系统是电动汽车所独有,为了使驾驶员在制动时有一种平顺感,ABS 提供的液压制动力矩应根据再生制动力矩的变化进行控制,最终使驾驶员获得所希望的总力矩。同时,液压制动的控制不应引起制动踏板的冲击,不能给驾驶员一种不正常的感觉。为此,对再生制动系统采用PID 控制方式,对液压制动系统采用模糊控制的方式,以获得最佳的总制动力。
3.2 模糊控制器的建立
选用双输入单输出的模糊控制器,其中,输入量Ek和Ec分别代表滑移率偏差和滑移率偏差变化率,输出量U 代表液压制动力控制系数。选择Ek∈[-0.2,0.2],Ec∈[-2.0,2.0],U∈[-1.0,1.0]。输入输出量的隶属度函数均采用敏感度较高的三角形函数。Ek和Ec的模糊状态选择为5 个:NL,NS,ZE,PS,PL,分别表示“负大”“负小”“零”“正小”“正大”[4]。
模糊推理采用Mamdani 型模糊推理方法。模糊规则设定,如表1 所示。

表1 模糊规则
3.3 模糊-PID联合控制仿真模型的建立
根据式(1)~式(8),利用MATLAB/Simulink软件,建立模糊控制的ABS 系统与PID 控制的再生制动系统联合制动仿真模型[5],如图3 所示。
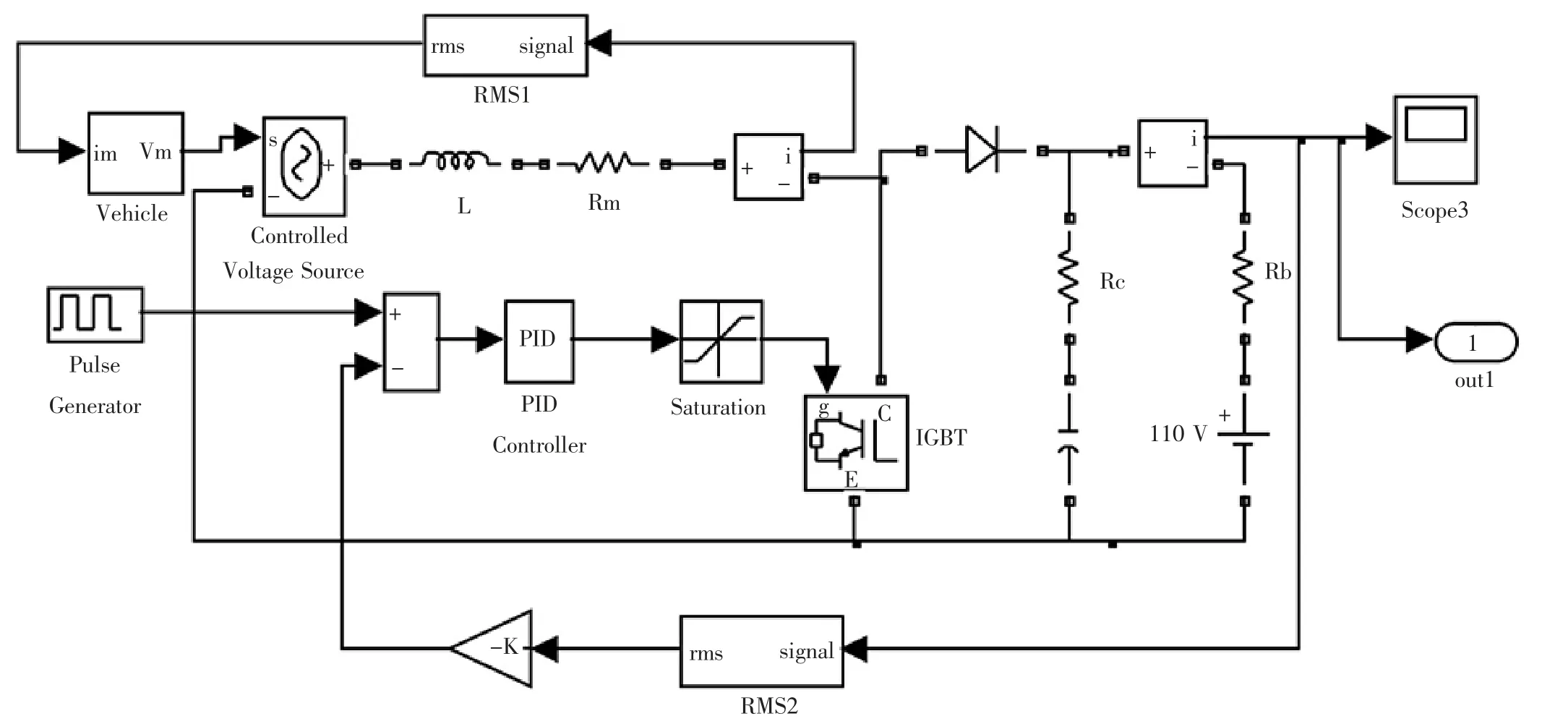
图3 电动汽车再生制动ABS 仿真模型
3.4 仿真结果
再生-ABS 制动的仿真结果,如图4~图8 所示。从图4~图8 可见:再生制动电流比较平稳,电流调整时间为0.9 s,超调量为9 A;再生制动力矩均为100 N·m左右;液压制动力矩变化较为平顺,且最后能够稳定于500 N·m;采用模糊-PID 控制方法,制动时间和制动距离较短,车速由30 m/s 降到0 所用的时间为3.85 s,制动距离为62.48 m。
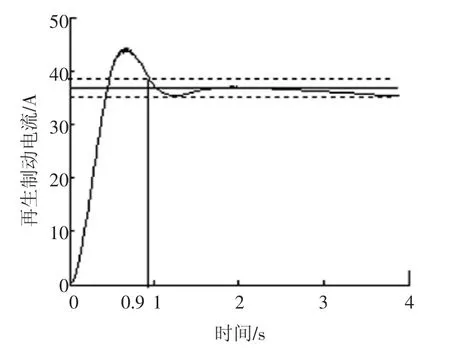
图4 再生制动电流变化曲线
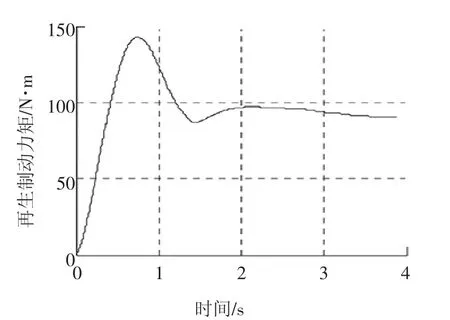
图5 再生制动力矩变化

图6 ABS 液压制动力矩变化
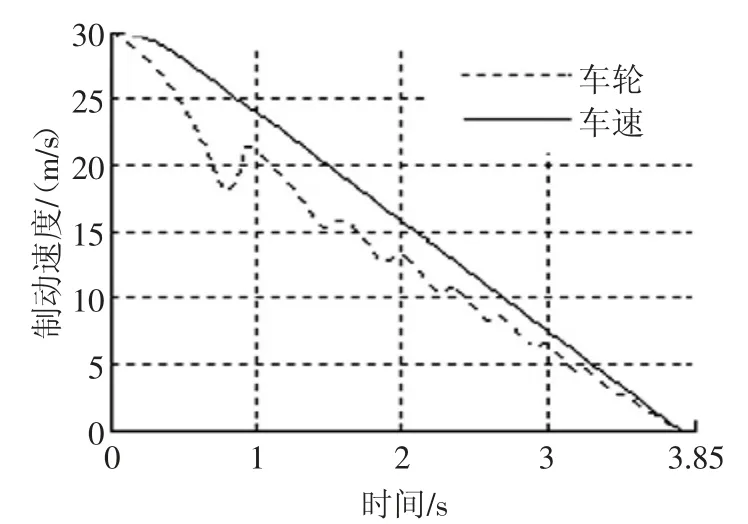
图7 制动速度变化曲线
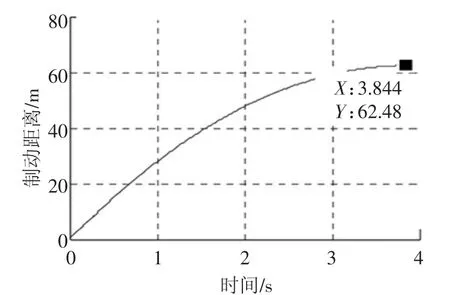
图8 制动距离变化曲线
4 结论
文章对电动汽车再生制动与ABS 联合制动进行了电学及力学建模,并对不同制动力选择了合适的智能控制方式,建立了模糊-PID 控制的ABS 再生制动仿真模型,最后得出了再生制动电流变化曲线、再生制动力矩变化曲线、ABS 液压制动力矩变化曲线、制动速度变化曲线和制动距离变化曲线。仿真结果表明,采用模糊-PID 控制的ABS 再生制动系统与实际情况基本吻合,能够满足电动汽车的制动要求,对电动汽车再生制动系统的理论与实际设计有一定指导作用。