车辆外廓三维测量仪的设计及其精度分析
2019-05-08郭文霏
郭文霏
摘 要:2015年3月1日实施的国家标准GB21861-2014《机动车安全技术检测项目和方法》,要求各个机动车检测站必须对机动车的外廓尺寸进行强制检测,并要求对大中型客货车、专项作业车、挂车必须使用自动测量装置进行检测。过去的检验方法已不适应新的要求,急需一种能自动检测车辆外廓的仪器。本文提出一种车辆外廓三维测量仪,以激光扫描仪为主要测距设备,结合光电测量光幕、对射开关等,可完成车辆外廓尺寸的自动检测,且测量精度高,性能可靠。
关键词:车辆三维测量;机动车外廓;激光扫描仪;自动检测
中图分类号:U495 文献标识码:A 文章编号:1671-2064(2019)06-0076-02
1 技术背景
机动车超载超限已成为严重影响人们生命财产安全、危及社会经济秩序的一个突出问题。为了从源头上治理机动车超载超限,国家近年颁布实施了国家标准GB1589-2016《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值》对机动车外廓尺寸等技术参数作了明确的限定,而GB21861-2014《机动车安全技术检测项目和方法》则对这些参数的查验和检测提出了新的要求,不但要求把机动车的外廓尺寸作为强制检测项目,而且要求对大中型客货车、专项作业车、挂车的检测必须使用自动测量装置,且测量误差不超过±1%或±50mm。因此过去用钢尺卷尺等人工检验方法已不适应新的要求。而现有的技术中,有些外廓测量仪是静态检测,测量效率低;有些则需设置龙门架,不但安装调试困难而且成本高;而且现有的外廓仪能测量半挂车销轴距的不多。此外廓测量仪不仅能快速精确的测量车辆的相关参数,测量精度高,测量过程不影响车辆的正常行驶,同时满足测量精度和测量速度的要求。
2 技术方案
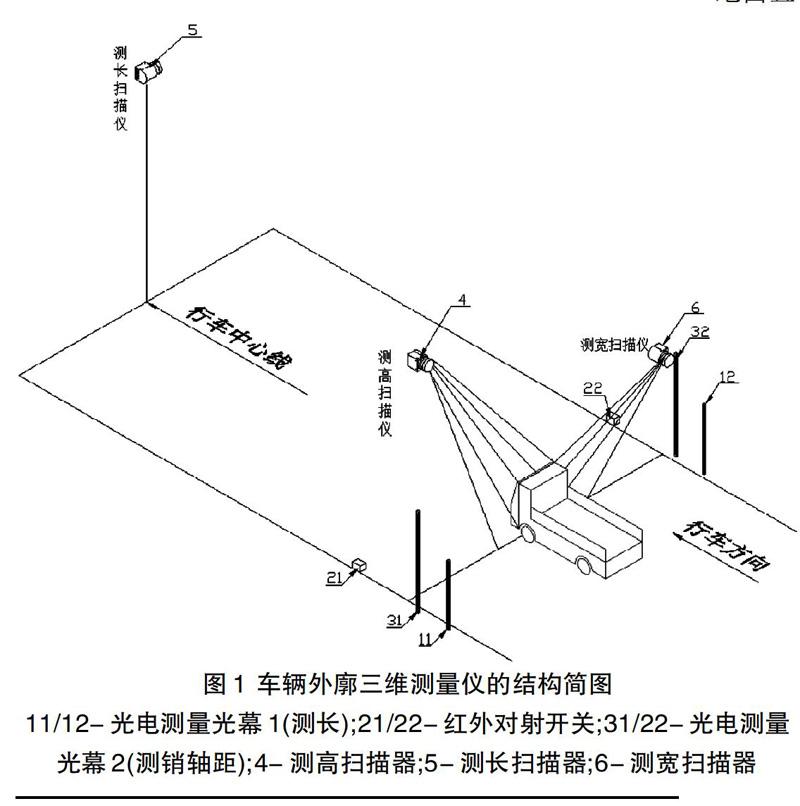
(1)在车辆行驶车道两侧垂直地面设置一对光电测量光幕1(11、12),光幕所检测到的高度范围应覆盖普通车辆车头的最凸部位的高度。
(2)在行车中心线的前方高处设置一个测长扫描仪5,设置高度应高于最大被测车高的0.5-1米,用于测量车辆的长度。测长扫描仪5与光电测量光幕1之间的距离必须大于最大被测车长1-1.5米。为保证测量精度,扫描面垂直于地面且平行于行车方向,并位于行车中心线上。
(3)光电测量光幕1前方、车辆行驶车道两侧分别设置一个激光扫描仪,其中一个距地面约5米(测高扫描仪4),另一个距地面约1.2米(测宽扫描仪6),用于测量车高、车宽及车厢栏板高。为保证测量精度,两个扫描仪的扫描面均要垂直于地面及行车方向。
(4)光电测量光幕1的前方地面设置一对对射开关2(21、22),与测长扫描仪读数结合可得出车辆的轴距。
(5)对以上采集到的数据通过计算机程序进行运算,便可得到车辆的三维图形,再对后视镜等影响车辆外廓尺寸的数据进行智能剔除,可得出车辆的外廓尺寸,并对检测数据进行存储和管理。
(6)测半挂车的销轴距时,可在靠近光电测量光幕1的前方再设置一组较长的光电测量光幕3(31、32),测量高度应能覆盖半挂车的鞍部。当半挂车行驶通过时,此光幕可辨别挂车鞍部的位置,结合上述车辆的三维数据和对射开关测得的轴距,可计算出被测半挂车的销轴距。
车辆外廓测量仪安装调试后,先将光电测量光幕、红外对射开关、测长扫描仪、测宽扫描仪和测高扫描仪的位置关系数据输入到控制系统,建立测量空间的初始数据。检测时,车辆以3-7km/h的速度驶进检测区域,当车头触发光电测量光幕1时,测长扫描仪开始对车头的距离进行读数;车辆行进期间,测长扫描仪不断读数;当车尾离开光电测量光幕时,测长扫描仪停止读数。测长扫描仪的起始读数值与终止读数值之差就是车辆的长度。车辆行进时,测长扫描仪对车长不断读数的同时,测高扫描仪和测宽扫描仪也不断对车辆进行扫描,得出扫描仪每一次读数时扫描面上的截面数据及宽高。通过计算机软件计算并模拟构建车辆的三维图像,去除后视镜等因素,便可得出车辆的长度、宽度和高度数据。如图1所示。
3 结构设计
根据以上技术方案,考虑外观及便于安装调试,对仪器进行整合。因测宽扫描仪的安装高度约为1.2米,两组光电测量光幕相距不远,故设计一立柱A,其两侧面分别安装光电测量光幕1和2的接收端,正面安装侧宽扫描仪;且将仪器总的电控和通信部分装于立柱A内。光电测量光幕1和2的发射端则装于立柱B的两侧。考虑外观及零件的统一性,立柱A与立柱B形状大小相同。对装于5米高的测高和测宽扫描仪,分别设置一个检测箱,外面安装扫描仪,内部安装扫描仪的电控部分。因测量光幕及扫描仪的扫描面都有垂直于地面的要求,所以这些测量部件都设置有角度调整机构。为提高可靠性,在扫描仪外侧还设有防尘遮光装置,避免尘埃覆盖于扫描仪的测量面而影响测量的可靠性。同时还有遮光的作用,减少外界光线对扫描仪产生干扰,影响测量结果。该装置由固定侧和滑动侧组成,采用气缸来控制装置的开合。整套车辆外廓三维测量仪的结构简单,安装及调试方便,且测量准确可靠。
4 精度分析
4.1 激光扫描仪的分辨率对测量精度的影响
根据测量原理可知:高度方向的误差为h=p*cos(θ),长度方向的誤差为l=p*sin(θ),宽度方向的误差为w=2p*sin(θ)。其中p为激光扫描仪的分辨率,本设备为±1cm;θ为激光扫描线与地面垂直方向的夹角。由于cos(θ)≤1、sin(θ)≤1,激光扫描仪的分辨率对高度、长度的测量结果造成的误差≦1cm,宽度的测量结果造成的误差≤2cm,满足国标对外廓仪的误差要求。
4.2 激光扫描仪的采样间隔对测量精度的影响
激光扫描仪在扫描面上的采样间隔影响到车辆截面表面的采样点数,间隔越小,采样点越多,对车辆三维成像越为真实、精确。
车辆水平方向的采样间隔:
△x=(hd-hw)*[tan(θ+β)-tanθ]
车辆垂直方向的采样间隔:
△y=△x/tan(θ+β)=(hd-hw)*[1-tanθ/tan(θ+β)]
其中:hd为激光扫描仪的安装高度(5m),hw为扫描点的高度,θ为扫描线与地面垂直方向的夹角,β为相邻扫描线的夹角,本装置为0.25度。
设检测车道宽为6米,则测宽、测高扫描仪距离行车中心线的距离为3米,以1.5米高、1.8米宽的汽车最低点的宽度来计算水平采样最大间隔:θ=arctan[(3-1.8/2)/5]=22.8°
△Xmax=(5-1.5)x[tan(22.8°+0.25°)-tan22.8°]= 0.018m
即水平采样间隔小于2cm。
垂直方向的采样间隔的影响为车辆越宽,采样点高度越低,采样间隔越大。以3米宽的车辆采样高为0的采样点计算垂直采样最大间隔:θ=arctan[(3-3/2)/5]=16.7°
△Ymax=(5-0)x[1-tan16.7°/tan(16.7°+0.25°)]= 0.0471m
即垂直方向最大采样间隔小于5cm。而实际上,车辆高度不可能为0,因此车辆最宽处采样间隔远小于此值。
从车辆实际采样效量来看,水平方向和垂直方向的采样间隔能满足实际检测需求。
4.3 车速及扫描间隔对车长测量精度的影响
测宽、测高激光扫描仪的扫描间隔影响对车辆表面的采样频率,间隔越小,扫描次数越多,获取车辆的横截面数据越多,三维成像越为精确。而车速的快慢影响每个扫描间隔时间内车辆前进的距离,同样影响获取车辆的横截面数据的多少。
激光扫描仪的扫描速度是固定的,本设备的扫描间隔是20ms,当检测车辆行驶速度为7km/h时,一个扫描间隔内车辆行驶的距离为:7×1000/3600×0.02=0.038m。即长度方向采样间隔为3.8cm
因此,我们对检测车辆的行驶速度要求为3-7km/h之间。车辆在此速度范围行驶通过检测区域,测量误差合符外廓仪的国标要求。
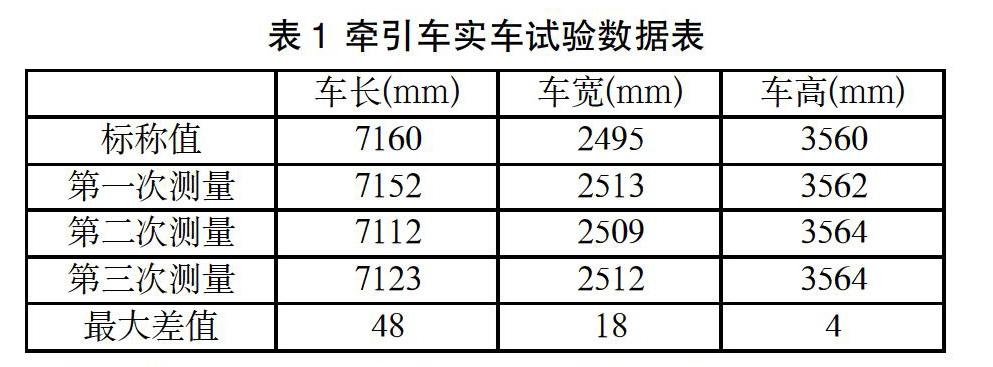
我们对一台牵引车进行实车试验,测量数据如表1所示。
5 结语
本文主要介绍了一种车辆外廓三维测量仪,此仪器于2016年已实现量产,并已应用于国内多个机动车检测站,在实际应用中取得了良好的效果。实践表明,此外廓三维测量仪技术先进、功能齐全,不仅性能稳定可靠、测量精度高、重复性好,而且操作简单、快捷,得到了广大用户的一致好评。
參考文献
[1] 陈显龙,陈晓龙.基于激光雷达的车辆几何尺寸超限检测系统设计[J].测绘通报,2014(3):9-11.
[2] 程炎星,杜颖,杨华西,麻伟明.浅析机动车外廓尺寸动态测量装置的应用[J].技术与市场,2013,20(3):33-36.
