六足并联步行机器人工作空间
2019-04-28唐新星范大川韩方元崔玉定
唐新星,范大川,韩方元,崔玉定
(1.长春工业大学 机电工程学院,吉林 长春 130012;2.武汉科技大学 汽车与交通工程学院, 湖北 武汉 430081)
0 前言
多足步行机器人相对于轮式机器人、履带式机器具有良好的地面适应能力。目前部分足式机器人腿部结构是开式链关节型机构,结构简单,控制较容易,但其传动系统及驱动装置大多置于关节处,导致系统惯量大,影响机构的动力性能,且开式链关节型机构的承载能力相对较差,机构末端误差为各个关节误差的累积和放大。而并联机构用于腿部结构时,机器人在行走过程中能更加方便地实现多方位甚至全方位运动,且其承载能力更强。在设计时需考虑腿部相对机体的安装位置和各腿之间的相互位置对机器人性能造成的影响,因而应根据具体运动需求合理安排设计机器人腿部结构。
日本早稻田大学高西教授等研发的WL-15型两足机器人是世界上第一台能够实现载人步行的两足机器人[1]。日本千叶工业大学研发的为步行困难者使用的步行机器人Chariot[2]和Hyperion4[3],韩国科学技术高级研究所开发的“Hubo FX-1”机器人[4],日本东京工业大学为下肢残疾人研发的步行椅样机[5]。燕山大学张成军提出了一种基于3-RPC并联机构的3移动自由度步行机器人,可以在不调整身体姿态的情况下向任意方向移动[6]。燕山大学王洪波教授提出了四足/两足可重组步行机器人机构上的实现方法[7]。郑州大学提出一种基于串并混联四足步行机器人,并对该机器人的串并混联腿进行运动学分析[8]。此外,华中科技大学、哈尔滨工业大学、上海交通大学等高等院校也对多足机器人进行了研究,并取得了很多研究成果[9-10]。可以看出,多足机器人已成为机器人技术领域的研究热点。
本文以并联机构作为机器人腿部结构,充分利用并联机构结构简单、刚度大、运动学反解较容易实现等优点设计出了一种六足步行机器人。
1 六足步行机器人结构设计
六足步行机器人机构由1个定平台、2个Y型足弓、以及连接2个Y型足弓与定平台的12个支链组成,1个定平台相当于髋关节。12个支链由2个虎克铰和一个伺服电动缸组成,每6个支链形成一个并联机构,进而构成了步行机器人的一条腿,因此,步行机器人有两条腿。每个并联机构的相邻的两个支链一端的虎克铰通过金属钣金框架连接到固定平台上,钣金框架的设计可以增大虎克铰链的安装角度,进一步扩大分支链的活动空间,防止分支移动到极限位置时虎克铰链的卡住,减小机构的奇异形状。而相邻的两个支链另一端的虎克铰链通过一个零件连接起来,构成了步行机器人的一个脚,因此,每条腿各有3只脚。此外,每条腿中的三只脚由Y结构部分连接,构成了6-UPU并联结构的动平台,因此,步行机器人具有两个动平台。为了确保六足步行机器人具有越障能力,在每个脚上安装辅助腿,因此,六足步行机器人共有18个自由度。利用CATIA软件建立六足步行机器人的三维模型,装配图如图1所示。

图1 六足并联步行机器人三维模型
为保证六足步行机器人的稳定,必须有一条腿站在地上支撑六足步行机器人的身体。当机器人行走时,负责支撑的并联机构腿被定义为支撑腿,保持向前和转弯的并联机构被定义为摆动腿。在步行过程中,六足步行机器人根据步态序列交替两腿机构来实现机体运动。六足步行机器人的结构是中心对称的,能够沿任意方向前进。

图2 坐标系建立
2 六足并联步行机器人运动学分析
2.1 坐标系建立
由于六足步行机器人2条并联腿结构相同,可将每个腿作为独立的模块。在机构分析时,建立如图3所示的坐标系。在1个定平台上建立六足步行机器人的定平台坐标系O-XYZ,定平台坐标系的原点位于定平台的几何中心点,用{O}表示;2条腿的上平台坐标系分别为A-xAyAzA和B-xByBzB,坐标系的原点分别为A、B,且A-xAyAzA和B-xByBzB与定平台坐标系的坐标原点O重合,上平台坐标系的xAyA、xByB平面分别与动平台重合,zA、zB轴与定平台的坐标系的Z轴重合,分别用{A}、{B}表示;2条腿的2个动平台坐标系分别为a-xayaza和b-xbybzb,坐标系的原点分别为a、b,分别位于2个动平台的几何中心,xaya、xbyb平面分别与动平台重合,za、zb轴分别垂直于动平台,分别用{a}、{b}表示。
2.2 6-UPU并联机构运动学反解
对于六足步行机器人的腿部并联机构位置反解就是根据步行机器人的位置和姿态,求解2条腿中的各腿中6个驱动分支的杆长。结合图3,清楚地显示了铰点的分布。当给定腿部机构的各个结构尺寸后,利用几何关系,可以很容易写出腿部机构上、动平台各铰链点(Ai,ai,Bi,bi)(i=1,2,3,4,5,6)、在各坐标系中的坐标值,再由式(3)即可求出各铰点在上平台坐标系、动平台坐标系中的坐标,则两条腿中的6个支链的长度矢量li、Li(i=1,2,3,4,5,6)可在固定坐标系中表示为

(1)
(2)
3 六足并联步行机器人工作空间分析
工作空间是并联机器人末端执行器的工作区域,是衡量机器人性能的重要指标之一,可分为固定姿态工作空间和极限工作空间。
在求解机器人的工作空间时,若对输出的姿态不做限制,得到工作空间称为可达工作空间,但是由于并联机器人的末端存在姿态和位置的强耦合,增加了描述工作空间的难度,并联机构的工作空间一般可分为定姿态工作空间和定方向工作空间两部分,两者都是可达工作空间的一部分。定方向工作空间是指机器人末端的某一向量保持不变时得到的工作空间,而定姿态工作空间是指机器人末端的姿态保持不变时得到的工作空间。根据本文设计的步行并联机器人的实际功能需要,通过边界搜索法对机器人的定姿态工作空间进行求解[12]。
边界搜索法的具体步骤如下:
(1)根据机构的结构参数,确定出机器人并联机构在za轴方向的边界zamax和Zamin,即所有支链最短或最长时,动平台几何中心在固定坐标系za轴上的位置。为了保证机构的定姿态工作空间包络在搜索区域内,所选搜索区必须大于机构定姿态工作空间的最大边界,据此确定xamin、xamax、yamin、yamax的值;
(2)将搜索区域平行于xaAya平面进行等分,步长为Δz=(zamax-zamin)/n;
(3)在z=Zmax平面内,从x=0、y=0开始,逐步增加或减少x和y的值,直到支链长度满足li
(4)逐步减少Δz,直到完成对z=Zmin平面的搜索,所有满足条件的边界都被找到,结束搜索。
根据步行机器人的结构参数,结合并联机构运动学反解的求解方法,将边界搜索过程用MATLAB软件进行编程来求解机器人的定姿态工作空间,如图3所示,其中图3a是工作空间在xy平面上的投影轮廓,图3b是工作空间的三维描述。
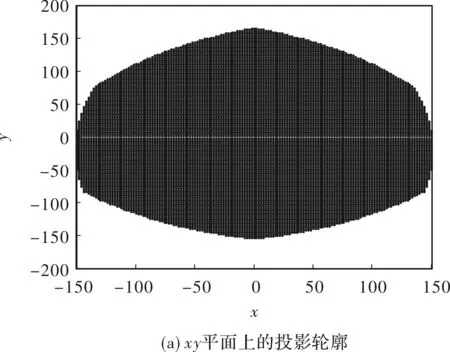

图3 工作空间图
从工作空间图3可以看出,6-UPU并联机构的动平台在x、y、z平面内最大的活动范围均为150 mm,为进一步轨迹规划步法的设计奠定了基础。
4 结束语
(1) 设计了一种六足并联步行机器人,进行了运动学反解,并以此为基础进行了工作空间分析。
(2) 进行了六足并联步行机器人的动平台进行了工作空间的求解,仿真结果表明,6-UPU并联机构的动平台在x、y、z平面内最大的活动范围均为150 mm,为进一步进行步行机器人的控制奠定了基础,对开拓并联机器人研究领域和扩大并联机器人的应用范围具有重要意义。
