基于无人机的抽水蓄能电站巡检方案分析
2019-04-26邹彬罗自学陈金颖刘壮李斌
邹彬,罗自学,陈金颖,刘壮,李斌
(1.国网新源华东宜兴抽水蓄能有限公司,江苏 宜兴 214205;2.华中科技大学,湖北 武汉 430074;3.深圳市科比特航空科技有限公司,深圳 518100;4.中国电力科学研究院有限公司,武汉 430000;5.国网新源华东宜兴抽水蓄能有限公司,宜兴 214205)
0 引言
本文主要针对实例来了解互联网+无人机自动化巡检模式,同时针对实例中的巡检方案设定进行分析。实例抽水蓄能电厂属于日调节纯抽水蓄能电厂,具有调峰填谷、调频、调相的重要功能,该电厂周边环境较为复杂,其上下库区的边坡、连接公路边坡面积旷阔,下水库海拔84 m、上水库海拔473 m,可见其地势环境起伏较大。在此基础上,实例抽水蓄能电厂传统人工巡检模式每次耗时约5 h,出于人性化管理概念巡检每4天一次,而在传统人工巡检制度之下,该电厂的每年故障率依旧高达30%,为了对此进行改善,实例电厂采用了互联网+无人机自动化巡检模式,同时针对此模式进行了方案设定。
1 实例电厂互联网+无人机自动化巡检模式应用分析
1.1 实例电厂地势环境分析
实例电厂下水库海拔84 m、上水库海拔473 m,地势环境起伏较大,通过测量该电厂从最高处至最低处直线距离4.5 km,下水库距上水库附近公路直线距离为9 km。在上水库处,因为海拔较高,所以市场存在阵风现象,瞬时风速最高可达7 m/s。此外,该电厂的电磁环境方面,因为其电视发射塔位于上水库附近,所以在此处采用了频谱仪对此进行检测,检测结果显示,该电厂在892 m、896 m、899 m处发现了电磁信号较强的表现[1-6]。
实例电厂地势陡峭,根据测量其坡度倾角均达到了60°以上,并且其内部气候为润,野外环境当中存在许多蛇虫鼠蚁,容易对巡检人员造成一定的威胁,同时实例电厂夏季降雨量较大,所以容易发生较大的塌方现象,对于电厂以及巡检人员而言,均具有较大的风险性,上述因素同样会给人工巡检模式带来困难。
此外,实例电厂在初期修建时因为技术水平以及地势环境的限制,采用了爆炸开山的方式来改变山体结构,通过之后的应用,该地区时常会发生落石现象,可能会导致巡检道路堵塞,同时具有一定的危险性,实例电厂详细安全隐患如表1所示。

表1 实例电厂详细安全隐患
1.2 互联网+无人机巡检特点
本文所设计的互联网+无人机自动化巡检模式技术结构如图1所示。
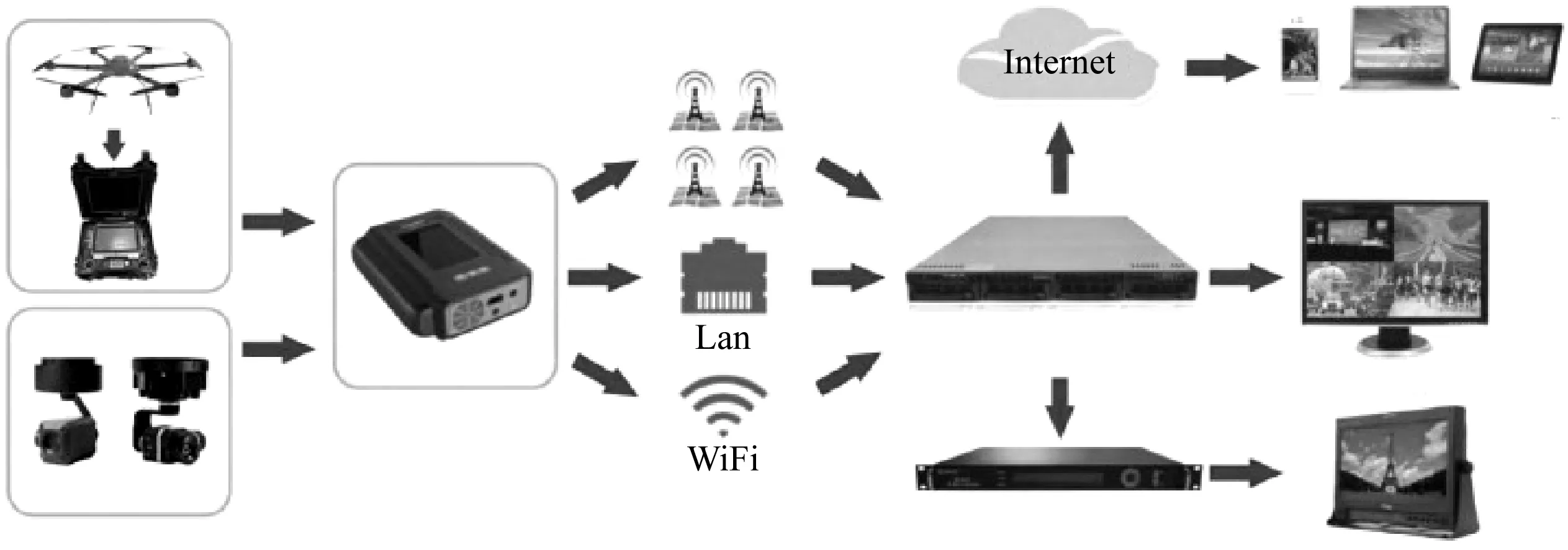
图1 互联网+无人机自动化巡检模式技术结构
通过实际测验结果,互联网+无人机自动化巡检模式具有以下4大特点。
1、可进入低空环境进行巡检,同时通过视频传输,可以依靠系统终端判定飞行直线路径前50 m是否存在遮挡物,如存在遮挡物则直线上升直至无遮挡物为止,实现自动化巡检[7-11]。
2、同样通过视频传输,可以将巡检内容实时传输到系统终端,再由系统终端将内容传输到显示设备上,整个过程在信号通常的情况下,速度在1 s以内,所以此巡检模式的实效性较强[12-14]。
3、在显示设备处,监控人员可以观测到巡检信息,根据此信息建工人员能够判断无人机飞行轨迹是否存在异常,如果存在异常可以通过控制功能来进行处理,体现出可控性[15]。
4、多旋翼无人机设备的环境适应能力较强,可以在阵风、低温、高温、降雨量较小的环境下进行作业,并保障传输信息的高分辨率[16]。
2 互联网+无人机自动化巡检模式设计
2.1 总体系统框架设计
本文互联网+无人机自动化巡检模式总体系统框架设计如图2所示。
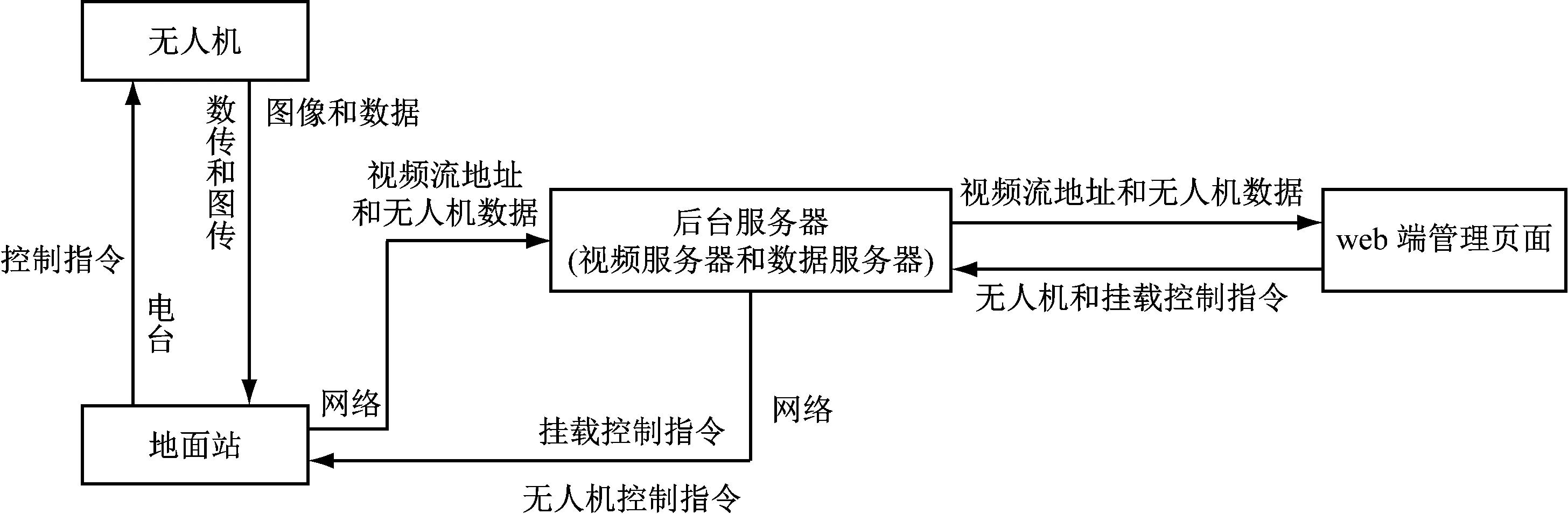
图2 互联网+无人机自动化巡检模式总体系统框架
在总体系统框架当中,本文主要采用了接收链路、控制链路来连接框架内的各个结构。在接收链路方面,主要从多旋翼无人机设备开始,将无人机设备所拍摄到的视频图像传输到地面站,再由地面站通过转发服务器的方式连接网络,依靠网络传输能力将视频图像信息传输到后台服务器,后台服务器接收到视频图像之后将自动进行储存,在依靠web实现网络远程访问;在控制链路方面,当接收链路进行网络远程访问之后,如果需要进行控制,那么系统终端或人工会发出控制指令,同时web会与后台服务器连接将指令发送至后台服务器,后台服务器再依靠通讯协议、网络传输将指令发送到地面站,地面站再将指令通过信号传输发送到多旋翼无人机设备,多旋翼无人机设备的接收端将会接受并执行指令。
2.2 多旋翼无人机设备原理
本文所采用的多旋翼无人机设备与普通的多旋翼无人机设备不同,为了实现自动化控制,本文对此进行了改造。本文改造后的多旋翼无人机设备,能够通过无线电信号远程控制仪器、自身自带的控制程序来实现无人飞行,同时依靠高精度、高分别率的拍摄设备,即可实现无人巡检。
在系统架构上,该设备主要分为硬件系统与软件系统两种,其中硬件系统主要包括飞机端数据采集系统、地面站监控系统;软件系统主要包括航线规划、数据采集、远程监控、数据预处理等程序。
2.3 系统实验
为了验证本文互联网+无人机自动化巡检模式的有效性,本文将通过5个步骤来进行实验,具体如下文所述。
1、常规互联网+无人机自动化巡检实验。针对实例蓄能电厂进行巡检,要求系统实现全覆盖巡检,同时记录无人机在飞行过程当中是否出现了异常现象,如果存在异常现象则需要对异常地点进行分析,寻找异常原因。
2、飞行航路设定。为了确认无人机飞行的正确性,在实验当中,针对无人机飞行路径进行了规划,同时将规划路径输入系统控制当中,由系统自动控制无人机进行飞行,同时通过人工在显示端进行观测,记录无人机飞行的速度、高度等参数,同时当发现无人机出现路径偏移现象时,同样需要进行记录。此外,如果无人机路径偏移过大,监控人员需要对此进行控制。
3、网络传输实验。为了验证无人机飞行的可控性,在上述实验步骤完成的条件下,对无人机人工控制功能进行测验,此举一方面可以了解人工控制功能的形态、一方面可得知网络指令传输的速度、稳定性。
4、无人机各角度拍摄功能实验。因为无人机在巡检过程当中,难免会因为部分因素发生拍摄角度倾斜的现象,在理论上倾斜角度可能会限制无人机拍摄功能开展,因此为了对此进行验证,本文通过控制功能,刻意要求无人机在各倾斜角度下进行拍摄,了解无人机是否能够正常进行拍摄。
5、拍摄图像清晰度、分别率验证。针对无人机在各环境、各倾斜角度下拍摄的图像信息进行分析,验证拍摄图像的清晰度、分别率是否达标。
3 结果分析
针对上述5个步骤的实验结果进行分析。
3.1 常规互联网+无人机自动化巡检实验结果
本文的互联网+无人机自动化巡检系统,在常规实验当中病危出现异常现象,说明该系统能够胜任常规的巡检工作,本文互联网+无人机自动化巡检系统的常规实验结果,如表2所示。
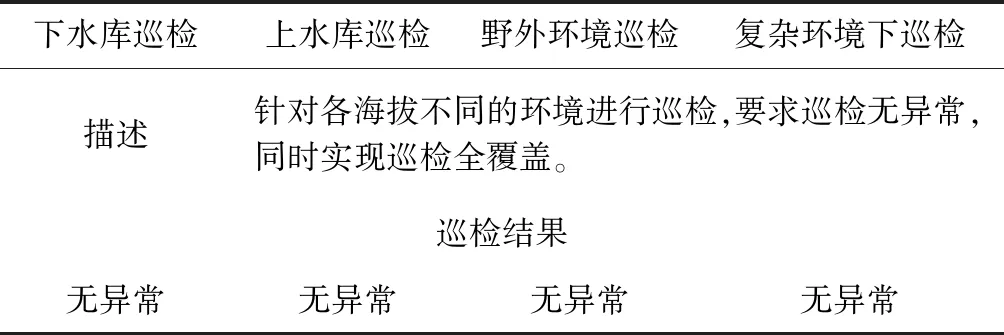
表2 互联网+无人机自动化巡检系统的常规实验结果
3.2 飞行航路设定实验结果
在飞行当中,互联网+无人机自动化巡检系统出现了1次较大的路径偏移现象,具体数值为2 m,针对此现象,监控人员及时的停止了无人机飞行,并针对异常地点进行了分析,分析后发现因为当时风力过大,到达了7.5 m/s左右的分离,导致无人机飞行受阻,此现象出于自然原因,并不能说明本文系统有误,所以无人机分析的正确性依旧得到了保障。同时在飞行速度与高度上,无人机直线飞行速度为1.3 m/s~1.5 m/s、直线拔高速度为0.9 m/s~1.1 m/s,说明其速率性较高;无人机飞行最低高度为1.2 m,最高高度为456 m左右,基本满足实例电厂的地势要求,可以实现自动化无人机巡检。
3.3 网络传输实验结果
要求人工针对每项控制功能进行5次操作,发现无人机在每次单项控制功能中的表现一致,说明无人机功能控制有效,而在指令传输方面,首先针对实例电厂的892 m、896 m、899 m等电磁信号较强的部分进行了实验,发现在此环境下网络指令传输速度在1.2 s左右,满足合理需求,在其他电磁信号较弱的部分,网络指令传输速度在0.9 s~1.0 s左右,同样满足合理需求,因此说明本文系统的速度、稳定性较好。
3.4 无人机各角度拍摄功能实验结果
本文通过控制功能,使无人机在30°、60°、90°、180°的角度下进行拍摄,通过排拍摄结果可见,无人机在各角度下均能进行正常的拍摄功能,仅在180°情况下,出现了1此卡顿现象,其原因在于电磁信号的干扰。
3.5 拍摄图像清晰度、分别率验证结果
在各环境、各倾斜角度下,无人机拍摄功能运作正常,在拍摄图像的清晰度、分别率上来看,结果较为清晰,拍摄例图,如图3所示。
图3 图人机拍摄例图
4 总结
主要分析了无人机抽水蓄能电站巡检的巡检方案。分析当中,首先针对实例电厂互联网+无人机自动化巡检模式应用进行分析,了解其中地势环境特点以及互联网+无人机模式特点,之后针对互联网+无人机自动化巡检模式进行设计工作,包括了总体系统框架设计、多旋翼无人机设备原理、系统实验3个部分,在总体系统框架设计当中采用了接收链路、控制链路设计方式,以此连接系统各个板块,同时阐述了其中运作流程;在多旋翼无人机设备原理方面,主要对传统多旋翼无人机进行了改造,阐述了其功能原理;在系统实验,通过5个步骤对此进行验证,最终进行了结果分析。
