MR技术在BIM领域中的适用性研究
2019-04-26张永明白桦
文/张永明 白桦
1 项目概述
目前的建筑信息化模型(BIM)已经有较为完备的体系模型,它可集成整个工程生命周期中不同阶段的工程信息资源于一体,以便于被工程的其他参与者调入使用。从BIM的设计过程可以看出,它不仅是数字信息的集成,更是数字信息的应用,设计、建造、管理等方面的数字化方法都有应用。
MR在BIM上的应用不但可以提高电力工程部分环节的效率,而且将使得技术研究在电力工程中的适用具备一定精准度,录入信息更有参考价值。
2 研究路线
2.1 初步系统构架
初步系统构架如图1所示,本次研究以功能验证为主。
系统分三种模式:
(1)帮助模式;
(2)预览模式;
(3)校准模式。
信息存储方式以画面捕捉为主要手段。功能验证成功后续可以加以网络拓展。
2.2 技术路线
2.2.1 硬件架构设计原则以便携性原则、提高性设计的原则,本研究的MR技术硬件支撑采用当前市面上先进性数一数二的Microsoft Hololens开发者版本。该产品核心功能主要是依托于衍射型平显、DLP投影芯片、SLAM技术的立体混合成像。让使用者接收到虚拟场景与现实场景混合叠加的画面(MR)。
2.2.2 软件架构设计原则
就设计的精准性原则和设计正确原则,本研究设计的软件特性:易于操作、更高效、更精准、模板零误差。对此设计就校准功能之外额外设计了便于使用者认知操作与内容的帮助模式与预览模式。
2.3 验证
2.3.1 设计理论基础
(1)通过虚拟锚点与现实标志点的映射,确定空间。该映射允许多重多次自由组合,便于设计与修改。
(2)空间锚点的位置信息赋予通过Hololens空间映射技术实现。
2.3.2 模式探究
模式一如图2所示。
优点:这种方式对空间确定在锚点信息一一对应的情况下误差极小,锚点的定位操作也仅限于坐标信息,适用于单次高精度校准的作业。
缺点:每次校准需要操作四个点,繁琐;四次操作锚点,若使用者操作水平不高就会将误差指数放大。
模式二如图3所示。
优点:这种方式对空间确定在锚点信息一一对应的情况下误差较小,锚点的操作次数仅为一,适用于需要多次校准的作业。
缺点:空间的确定仅通过一个锚点信息,对使用者的操作水平要求较高,尤其是虚拟映射点的旋转信息容易产生较大误差。
3 功能结构
涉及到的模块绝大多数使用C#语言进行开发,开发工具使用Unity5.6.1以及Visual Studio Community 2015,基础开发包为MixedRealityToolkit-Unity5.6,开发环境为Windows10。每个模块实现与业务逻辑都按实际需求考虑以降低误差为第一要素设计,各模块协作组合。
4 系统功能
4.1 帮助模式
为用户提高了必要的提示指导,方便用户能在短时间快速理解软件操作与功能。
4.2 预览模式
通过操作用户随时得到可360°无死角预览的整体框架缩略模型,使用户可以快速对环境有个整体认知,提高校检效率。
4.3 校检模式
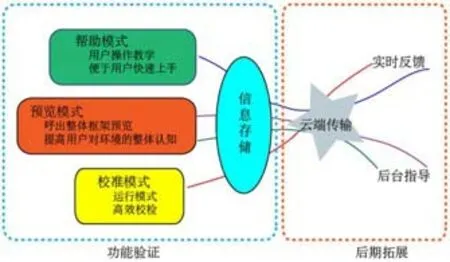
图1:初步系统架构

图2:模式一
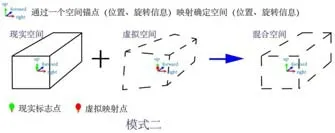
图3:模式二
运行该模式进行真正的比对校检,通过简单的操作将虚拟锚点与现实标志对应结合内部逻辑就能实现虚拟标准模板在现实场景中的叠加,通过比对混合图像的异同来确定电力工程的施工是否正确。同时也可以作为施工时的参照。
5 总结
总体上讲,本次设计研究初步验证,在HoloLens硬件没有突破性革新的情况下有一定参考价值,在精度要求很高的建筑施工领域智能化水平还未达到期望值。需要操作人员在偏差值超过阈值之前进行人为手动校准,虽然通过设计手段将单次校准的操作和精度都提高到了设计最优。