基于遗传算法的多传感器规划技术
2019-04-26张龙龙刘睿赵坤高湘飞
文/张龙龙 刘睿 赵坤 高湘飞
1 引言
面对世界反恐的严峻形势以及国家国防安全的巨大需求,无人机由于其操控的灵活性以及低成本性,其相应技术的发展受到全球的高度重视,并广泛应用于军事侦察任务。无人侦察机可携带多种类、多类型侦察传感器,实现对敌方电磁辐射源的侦察、定位,为指挥决策提供情报支援。对敌方辐射源进行无源定位是无人机侦察的一个重要应用。单站定位的实现过程通常是用单个运动平台对辐射源进行连续测量,利用运动学原理测距,以振幅、相位或多普勒频率法测向,依靠几何学原理定位,实现单站对固定和运动辐射源的快速、高精度定位。
侦察机执行任务前对侦察传感器进行有效、合理的规划,结合侦察航线、针对待侦察的感兴趣目标实现对传感器监视区域、侦察参数的规划,利用侦察机携带的多种类、多频段侦察天线对电磁辐射源进行测向定位,合理的为不同的目标分配侦察天线,可有效提高传感器工作效率和侦察任务的作战效果。
当前侦察机多传感器规划技术面临瓶颈,在于同时侦察多个目标时传感器资源分配最优化问题。目前多传感器规划主要受限于:
(1)被侦察目标的辐射源信号类型、频率范围、数量的不断增多;
(2)可选择的侦察天线类型、频率范围的多样化;
(3)后端处理设备对多样化天线的处理能力。因此对传感器资源进行合理科学选择和分配,实现对目标有效的探测是传感器规划要解决的核心问题。
2 国内外研究现状

表1:仿真实验设备表
传感器规划最重要的内容就是设计最优的规划标准,建立最优规划模型,使用最优规划模型来给不同的待侦察目标分配探测传感器。文献[1]使用有效观测次数作为衡量遗传算法价值的度量,但针对测向定位应用对目标观测效果除了与观测次数有关,还于观测角度、观测误差等因素有关,仅凭观测次数不能很好的衡量目标价值。文献[2]采用的是传统线性规划方法,时效性较差。文献[3][4]虽然采用的是遗传算法思想,但其应用场景是针对单一目标的侦察,无法满足当前同时对多目标侦察的需要。
本文针对测向定位侦察应用提出使用几何精度稀疏因子GDOP(Geometric Dilution of Precision)作为衡量目标价值的指标,采用遗传算法,解决传感器资源对多目标同时侦察时规划问题,并通过仿真分析了不同参数对算法效果的影响。
3 基于测向定位的目标价值计算
对敌方电磁辐射源进行无源定位是电子侦察的一个重要应用,可获取敌方电磁辐射源的位置信息、部署情况,统计分析敌方辐射源活动规律,为指挥员制定作战计划提供情报保障。
针对目标辐射源定位的实际要求,本文选择几何精度稀疏因子GDOP(Geometric Dilution of Precision)作为传感器规划时对目标进行一次侦察获取的目标价值。GDOP 反映的是定位误差对测量误差的放大程度,可将GDOP作为判定目标价值的参考。在既定航线条件下,结合侦察传感器对目标的覆盖范围,使得GDOP 越小,表明对该目标进行侦察可获得较高的定位精度,也即测量前后获得的信息增量越大。
三维空间中的GDOP 定义为:

式中σx, σy, σz为x, y, z 方向的定位误差均方差,可将作为评价传感器规划优劣的指标。
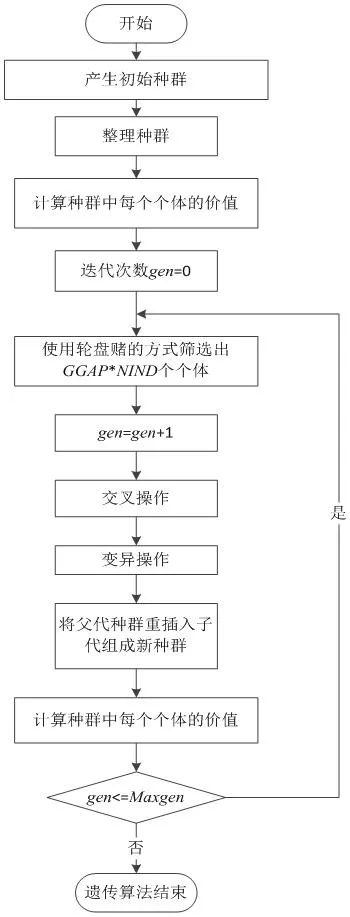
图1:遗传算法流程图

可得

其中
由公式(1-5)可得:根据飞机飞行速度、每分钟观测次数、观测位置与目标位置、可捕获目标的长度可以计算出给定航线条件下,目标捕获获得的GDOP 值。GDOP 越小,表明对该目标进行侦察可获得较高的定位精度,侦察效果越好。为了使计算过程更为快捷、计算结果更为直观,目标单次价值p 取GDOP 的倒数,则价值越大侦察效果越好。

对于威胁等级为Threat,历史捕获次数为n 的目标,在实际侦察中捕获N 次后已经基本探明目标相关信息及活动规律,历史捕获次数大于N 后,目标价值减小,则侦察目标获取的价值P 可表示为:

威胁等级越高,目标价值越高;当捕获次数大于N 后目标侦察价值急剧减少。
4 基于GDOP的多传感器遗传算法规划
4.1 遗传算法编码
遗传算法是基于生物进化论的自然选择和遗传学机制的随机搜索算法,是通过模拟自然进化过程来搜索最优解。遗传算法具有串集搜索、并行计算、自定义域、自适应、自学习等优点,在多传感器资源规划中具有较好的应用效果和前景。
传感器规划主要是为了解决电子侦察中为待侦察目标分配侦察天线的问题。在分配天线的过程中,需考虑天线侦察能力约束。假设一次侦察中有N 个待侦察目标,侦察机携带天线个数为M,则可建立1×N 维数组,数组的每一位代表一个目标,数组该位上的值代表侦察该目标使用的天线。
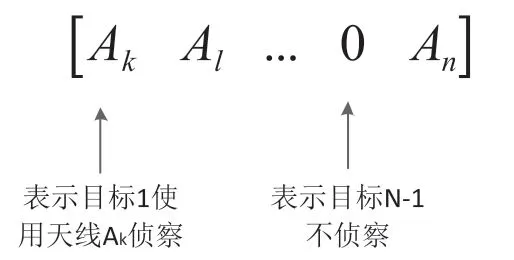
在天线分配的过程中需要考虑天线使用约束,包括可侦察任务类型约束、侦察任务数约束。因此需结合航线,按照侦察捕获目标的先后顺序对目标进行排序;同时,根据目标类型、工作频率,以及侦察传感器类型、工作频率,为各个目标分配可用天线集,在目标的可用天线集合中为目标分配天线。可用天线集合中包含0 选项,代表不对目标进行侦察。
交叉操作采用部分映射杂交,选择两个个体,选择对应位置的基因进行互换。针对传感器规划应用,假定有N 个待侦察目标,则在[1,N]区间内产生2 个随机整数r1、r2,对两位置中间的数据进行交叉。变异操作类似,选取一个个体,随机选择某一个基因,改变侦察该目标使用的天线即可。

图 2:侦察目标与航线分布示意图

图3:交叉、突变概率对算法收敛及最优值的影响
4.2 基于遗传算法的传感器规划
传感器规划属于多约束规划问题,初始化产生的种群、交叉变异产生的种群可能存在传感器使用冲突,不满足传感器使用约束。因此,在产生种群后,需要结合目标捕获的先后顺序、目标使用天线的范围,以及天线使用的约束,对每一个个体进行整理,根据目标捕获的先后,判断侦察机到达该目标捕获起始点时,为该目标分配的天线是否可用(是否被占用侦察其他目标,或达到侦察目标数量上限)。若天线不可用,则在目标可用的天线集合中随机为目标分配其他天线。每执行一次迭代,在计算个体适应度前,需要进行一次种群整理。
采用遗传算法对整理后的目标集合中的每个目标分别配置侦察天线资源,以得到较优的目标侦察结果。遗传算法中的参数包括:种群大小NIND、最大迭代次数Maxgen、交叉概率PC、变异概率PM 及代沟GGAP。算法处理流程如下:
使用遗传算法对分配天线的情况进行优化,输入的数据包括:排序后的目标集合、天线集合、电子侦察机航线信息和遗传算法的种群大小NIND、最大迭代次数Maxgen、交叉概率PC、变异概率PM 及代沟GGAP。算法流程如图1所示。
5 仿真分析
本文通过仿真实验验证了遗传算法的有效性,仿真实验采用的设备如表1所示。在制造模拟目标数据时,加入频率相似、信号类型一致并且位置相近的冲突目标,在所有的天线侦察组合中都不能被完全侦察,所以要放弃侦察一些目标。如图2所示,红色星形表示可以被侦察的目标,粉色正方形表示没有被侦察的目标,黑色折线表示航线。
遗传算法交叉率、突变率等参数值会影响算法的收敛性,决定能否达到最优解。若种群个体携带了最优解的基因,则通过交叉操作使最优解的基因组合起来反复迭代达到最优解;若种群个体没有携带最优解的基因,算法在迭代的过程中,则可通过变异操作产生最优解的基因。如图3所示。
由仿真实验分析可得出以下结论:
(1)遗传算法交叉率、变异率的提高,可以更容易得到最优个体(最优解);
(2)遗传算法交叉率、变异率的提高,也容易退化产生的最优基因,得不到最优解。
(3)设置合适的交叉率和变异率值,在得到最优解时又不退化最优基因。
6 结束语
本研究针对无人侦察多传感器规划中的测向定位侦察应用,提出使用GDOP 作为衡量目标价值的方法,采用遗传算法对多传感器规划,得到了最优解,且算法效率高;并通过仿真实验分析了交叉率、变异率对规划结果的影响。
