一种基于无人机的多传感器环境监测平台
2019-04-26邱洋苑俊英陈海山
文/邱洋 苑俊英 陈海山
1 引言
传统的环境监测方式往往以地面设立监测点为主,而对于地形广阔、环境复杂、监测设施数量有限等情况,既存在监测成本较高、实时性差、效率低等问题,还存在获取的数据空间覆盖程度有限、不能对污染物来源及其变化趋势分析进行有效预测等问题。在我国环境污染问题日趋严重的时代背景下,环境监测需求、监测难度、检测范围与监测实时性要求都急遽增加,导致传统的环境监测方式已经不能满足实际需求。在大气环境监测领域,地面监测是目前主要的监测手段,但对于一些排烟类的大气污染物还没有很好的浮空采样监测方法。
近年来,随着技术的不断进步与成熟,无人机在各行业都得到了快速应用,呈现出无人机+行业应用的发展趋势,为环境监测提供了一种新的技术手段。将无人机与物联网技术相结合,可以充分发挥无人机不受地形、空间、时间等因素影响的优点,实现一种更加安全高效、机动灵活、精细准确、作业成本低的环境监测模式。基于无人机的环境检测平台既可以广泛应用于常规环境监测,也可以用于特殊场景(如火灾、气体泄漏等高危环境),满足实时、有效、准确地对环境动态监测的要求。
无人机环境监测系统一般由机体、机载通信设备、地面设备、机载环境监测设备和信息处理系统等组成,实现飞行、操控、信息传输与数据处理等功能。机载环境检测设备一般由传感器、摄像机、GPS和嵌入式系统等组成,完成环境参数、图像、地理位置等信息的采集、汇集和预处理。环境参数经通信设备发送到地面设备,最后由信息处理系统进行处理和信息呈现,实现人机交互。
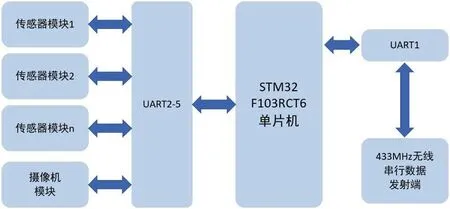
图1:数据采集系统设计
本文设计了一种可配置多种传感器的无人机环境监测平台,从环境监测设备、无线数据传输、信息处理系统等三个方面进行了探索,实现了基于小型四旋翼无人机与传感器相结合的大气环境参数监测系统。通过实地监测测试,本文方案能够支持图像采集、GPS定位、高度测量、空气温湿度以及常见气体浓度等,可以满足空中测绘、农作物监测、 环境监测及预警、矿产资源探测、应急救灾等应用场景需求。
2 相关研究
基于无人机的环境监控模式能够不受地形、空间、时间限制,可以人工控制无人机在空中停留并进行环境监测,可以极大地降低高空污染物的检测难度和危险性。谢涛等人[4]设计了一种基于无人机大气环境监测模式方案,为突发性大气污染事件的应急监测提供了一种新的技术平台,并提出了未来有待深入研究的主要方向。杨海军等人[5]以化学工业区为研究对象,采用无人机搭载采样器的方式,对污染气体中的NO、CO、SO2等进行监测。为解决城市空气质量监测设备匮乏问题,李壮等人[6]提出了一种基于四旋翼无人机空气质量监测系统的总体设计。滕腾等人[7]利用无人机遥感监测技术解决CO2地质封存泄漏风险事故监测的问题,通过环境背景值监测、试验监测、理论模拟和数据对比分析的方法为无人机遥感监测技术对CO2泄漏风险事故的响应效果进行了研究。为应对区域空气监测突发空气质量事件应,杨国林等人在监测的空气微小颗粒物及温湿度的基础上,利用北斗技术对监测区域监测进行了评估。朱易峰等人[12]把无人机技术应用于危化品事故救援,扩展了无人机+行业应用的范围。
上述无人机+环境监测方案的功能都较为单一,未能充分利用无人机受空间限制小的优势,应用领域通用程度可以进一步提高。本文采用低成本的四旋翼无人机,搭载多种高精度传感器,配合GPS和摄像机,设计并实现了一种基于无人机的多传感器环境监测平台,期望拓宽改平台在实际应用中的适应能力。
3 解决方案
本文设计的环境监测平台包含集成多传感器的无人机及其配套软硬件,在使用过程中仅需一台计算机,即可使用地面终端无线控制无人机执行任务,能够适应移动受限或难以到达目的地等应用场景。在发生自然灾害时,如灾区道路交通及通讯均中断的情况下,即可使用无人机现行进入灾区观测。与现有技术相比,本文设计的环境监测平台具有集成度高、应用场景广,功能扩展性强等特点。
3.1 系统架构
无人机分为飞控、传感器、摄像机模块,飞控使用APM2.8模块作为控制器,传感器使用STM32单片机作为控制器,摄像机可直接将视频信号传输到地面PC客户端,所有数据汇集到地面的PC客户端后,地面站软件可根据回传的数据实现分析、显示,控制无人机行动等功能。
3.2 数据采集系统设计
在数据采集系统中,传感器均通过通用异步收发传输器(Universal Asynchronous Receiver/Transmitter:UART)与STM32单片机相连接,传感器模块设计框图如图1所示。数据采集与处理流程为:在无人机上电后硬件自动初始化,完成GPS搜星和传感器预热。系统在执行任务时先读取无人机的位置信息,即经纬度和高度,接着读取环境传感器信息,并把这些信息实时回传到地面计算机存储备用,同时根据预设的阈值判断环境数据是否超标,如或超过预定标准则显示报警信息。

图2:空气中气体含量变化
3.3 环境参数
本文设计的环境监测平台可以采集的数据有地理位置,高度,温湿度,PM2.5,CO2,CO浓度等,还能够采集实景图像和人物跟踪等。
3.3.1 高度计算方法
本文选用的气压高度计为APM2.8飞控模块集成的MS5611气压高度计,该传感器根据地球表面的气压随高度上升而减小的原理设计而成,郝振海研究了高度气压计的实际工作原理,测算出了大气压与海平面相对高度计算公式:

其中,hb为传感器测得的无人机当前所处的海拔高度,PS为传感器测量到的气压,β为大气温度梯度,P0为标准大气海平面大气静压力。在实际应用中,起飞点初始测得初始海拔高度h0,飞行过程中使用测得的hb减去h0,即可得到无人机当前的飞行海拔高度。
3.3.2 PID控制方法
PID控制是一种由比例部分P、积分部分I、微分部分D 三种因素变量组合在一起对输入参数进行计算处理后输出的控制方法。
4 实验验证
本节旨在测试无人机环境监测平台在不同场景下的应用效果,从而验证方案的可行性和平台的稳定性。
PM2.5是近年来最具代表性的空气污染物,人体吸入后会粘附在肺泡中不能排出。为了突出空气中PM2.5的变化量,选取两个地点在下雨前后的两个时间段进行测试,得出如图2(a)所示的分析结果。可以明显看出在同一时间段PM2.5含量有所差别但差距不大,而在下雨后的空气中,PM2.5的含量明显降低。
CO2是造成温室效应的主要因素,过高的CO2浓度还会影响人类呼吸造成神志不清等情况。因此,在高浓度的CO2环境中(如火灾现场),采用无人机进行监测和搜寻是一种有效的手段。为突出CO2的浓度变化,选定同一时间段的两个地点以及同一地点早晚的两个时间段进行了测试。得出了如图2(b)所示的实验结果。由于礼堂(蓝色线)建筑物较为稀疏,场地较为空旷,故其含量相较于建筑物密度较大、人类活动较多的西区(黑色线)要低。而不同时间段的对比则更为明显,西区上午(黑色线)的CO2浓度相较于同一地点下午的(红色线)要低,这也符合植物光合作用吸收二氧化碳的时间规律。
无人机具有移动速度快和高度优势,因此携带上摄像机的无人机可捕捉宽广的视域,可利用这一特点实现无人机巡线、寻人、污染溯源等功能,在本文所设计的无人机中还融入了无人机视觉跟踪系统,可根据实际需求,选择追踪的对象。
5 总结
本位采用无人机平台设计了一种集成多传感器的环境监测平台,能够解决一般和特殊场景下图像拍摄以及环境参数采集的目的。为进一步推动该平台的应用,进一步的研究方向有典型场景下环境参数的模型,探索根据经验值设置响应的预警和报警机制等。