面向空间机械臂任务验证的硬件在环半物理仿真系统研究
2019-04-25李海泉梁建勋胡成威危清清
刘 茜,肖 轩,程 靖,李海泉,梁建勋,马 炜,胡成威,危清清
(1.中国空间技术研究院北京空间飞行器总体设计部,北京100094;2.清华大学航天航空学院,北京100084)
1 引言
自从第一个组件于1998进入轨道以来,国际空间站(International Space Station,ISS)作为微重力、空间环境等科学研究任务的平台,已经进行了许多成功和有意义的在轨任务[1]。空间机械臂作为ISS的重要组成部分,对ISS的组建和日常运营做出了巨大的贡献。空间机械臂在执行抓捕过程中一旦操作不当,所产生的碰撞力会使机械臂甚至航天器失稳或损坏,因此必须对有接触碰撞的操作阶段进行充分测试与验证。硬件在环(hardware-in-the-loop,HIL)技术通过地面机械臂模拟动力学数值仿真计算得到的空间机械臂的三维运动并将实测的碰撞力与力矩反馈到空间机械臂动力学仿真中[2-3],能够真实有效地验证空间机械臂动力学特性。
HIL仿真在国外已成功应用于许多在轨服务任务的验证。加拿大航天局基于HIL技术研发了灵巧操作机械臂在轨任务验证系统,对机械臂抓捕过程中的接触碰撞动力学特性进行了有效验证[4-6]。德国航天局开发了操作模拟器和在轨任务验证平台分别对卫星交会对接任务和空间机械臂操作进行验证[7-9]。国内的哈尔滨工业大学、上海交通大学、中国科学院等单位也对在轨任务的地面验证进行了研究[10-13]。由于起步较晚,国内基于HIL技术的地面验证研究还处在初级阶段。
针对空间机械臂在轨操作任务的地面验证,本文提出一种基于硬件在环的新一代空间机械臂操作任务验证平台(Manipulator Task Verification Facility,MTVF)系统,用于开展空间机械臂在轨操作任务的地面试验与验证工作,从而提高空间机械臂系统的可靠性水平和降低其执行在轨任务的风险。
2 系统总体设计
MTVF的主要硬件设施如图1所示,MTVF系统作为大型空间机械臂在轨操作任务半物理仿真和验证的地面验证平台,由4个主要部分组成:空间机械臂在轨任务的动力学仿真模型、2台定制的6自由度地面模拟机械臂、三维运动和力-力矩测量系统、以及实时仿真计算机。它的总体架构如图2所示,其中MTVF系统控制台的作用是根据用户需求对系统进行前期调试。在前期调试阶段,系统操作人员将在轨任务验证中的空间机械臂动力学模型和机械臂载荷动力学模型导入实时仿真计算机中,并排查数据流中可能存在的问题,确保MTVF系统正常运行。

图1 MTVF系统的模拟机械臂部分Fig.1 Emulation manipulators of MTVF
MTVF系统执行在轨任务验证的数据流图如图2所示。HIL控制台、HIL系统控制器、空间机械臂仿真模型和目标物体仿真模型(统称在轨任务动力学仿真模型)在实时仿真计算机中运行。HIL系统控制器作为MTVF系统的信息交流中心,接收来自测量系统的实测数据和来自在轨任务动力学仿真模型的仿真数据,并向模拟机械臂发送控制指令,向在轨任务动力学仿真模型发送碰撞力-力矩数据。MTVF系统的测量系统包括力-力矩传感器和三维运动传感器。力-力矩传感器安装在模拟机械臂和末端执行器或目标物体之间,用于采集末端执行器和目标物体所受到的碰撞力-力矩数据。三维运动传感器测量末端执行器和目标物体的运动数据。安装了目标物体的模拟机械臂在目标物体仿真模型的驱动下模拟其三维运动。同时,配置了末端执行器的模拟机械臂在空间机械臂仿真模型驱动下模拟末端执行器的三维抓捕过程。当末端执行器与目标物体发生接触碰撞时,力-力矩传感器测得的碰撞力将反馈到空间机械臂和目标物体的动力学仿真模型中,计算出相应的运动并驱动模拟机械臂运动。这个硬件在环实时仿真循环过程一直进行到空间机械臂任务的完成。

图2 MTVF的系统架构与数据流图Fig.2 MTVF system architecture and data flow
MTVF系统的数据网络通讯结构如图3所示。实时计算机以1 ms的步长运行,并保证在轨任务动力学模型和MTVF系统控制算法的实时性。力-力矩传感器和三维运动传感器通过UDP协议传输力-力矩和运动数据给实时仿真计算机。力-力矩数据反馈给在轨任务动力学模型计算下一步空间机械臂和目标物体的运动。同时,测量的运动数据和在轨任务动力学模型计算的运动数据通过MTVF系统控制算法生成地面模拟机械臂的控制指令,通过EtherCAT对地面模拟机械臂进行控制。

图3 MTVF系统通讯结构示意图Fig.3 Diagram of MTVF communication network
综上,MTVF系统具有如下特点:
1)实时仿真计算机实现了数值仿真和硬件设备的同步,保证了MTVF系统具有1 ms高采频的实时性。同时,实时仿真计算机为控制算法开发、数据监控和分析提供了环境。
2)2台定制的6自由度地面模拟机械臂是MTVF系统的主要运动执行硬件。它的底层和上层控制环都采用1000 Hz频率运行并通过增大齿轮传动比来获得更大关节加速度,这样便使得该机械臂比所有同类工业机械臂有更快的相应速度和更高的带宽。我们还通过系统辨识技术得到该两机械臂的动力学模型用以MTVF全仿真和过程控制。MTVF系统的控制算法实现了对地面模拟机械臂的有效控制,从而使MTVF系统具有高精度和快响应的特点。
3)三维运动传感器采用与模拟机械臂独立的全局坐标系下的运动测量设备,为MTVF系统提供准确而独立的实时三维运动测量数据。
4)三维力-力矩传感器装配在地面模拟机械臂末端,用于测量末端执行器与目标物体所受到的接触碰撞力和力矩,为MTVF系统提供准确的实时三维碰撞力-力矩测量数据。
3 系统控制模型
MTVF系统中,装配末端执行器的地面模拟机械臂跟踪仿真实时计算机中空间机械臂动力学模型的运动指令,而装配目标物体的地面模拟机械臂跟踪仿真实时计算机中目标物体动力学模型的运动指令。同时,力-力矩传感器采集末端执行器与目标物体的接触碰撞力和力矩经转换后反馈给空间机械臂动力学仿真模型从而生成新的运动指令驱动地面模拟机械臂运动。为了实现对接触碰撞过程高保真的模拟,MTVF系统的控制算法需要满足以下要求:
1)能够保证在轨任务仿真模型和地面模拟机械臂之间的三维运动相符;
2)能够使地面模拟机械臂末端体现空间机械臂末端的阻抗特性。
3.1 闭环稳定算法
MTVF系统跟踪空间机械臂仿真运动的闭环稳定性通过空间机械臂和目标物体的总能量稳定来保证。总能量Etotal如式(1)所示:

其中,Es和Et分别表示空间机械臂和目标物体的机械能。
认为空间机械臂对目标物体执行在轨操作时除了机械臂以外没有任何别的主动设备输入能量,空间机械臂和目标物体的总能量应该满足式(2):

其中,t1、t2表示仿真时间。
总能量包括动能和势能。认为在执行在轨任务中势能的变化忽略不计,则总能量可以近似用空间机械臂和目标物体的动能表示。
由于MTVF系统存在机械系统和测量设备等造成的时延,因此将可能导致空间机械臂和目标物体的总能量增加。当总能量增加时,通过式(3)对总能量的期望进行修正:

通过对总能量期望的修正保证了MTVF系统中地面模拟机械臂和在轨任务仿真模型之间的三维运动相符。
3.2 阻抗控制算法
在空间机械臂关节不受控条件下,空间机械臂末端的阻抗特性通过末端受力和末端运动之间的关系获得。因此,空间机械臂末端阻抗Zses()表示为式(4):
式中,Fse(s)∈ RR6×1表示末端受力Fse(t)∈RR6×1的拉式变换; Xse(s)∈ RR6×1表示末端运动Xse(t)∈ RR6×1的拉式变换。
为了使地面模拟机械臂末端体现空间机械臂末端的阻抗特性,地面模拟机械臂采用基于阻抗的控制算法,如图4所示。其中,Xge∈ RR6×1表示地面模拟机械臂末端的实际位姿,F∈ RR6×1和Fge∈ RR6×1分别表示前馈的六维广义阻抗力和测量的六维广义接触碰撞力。

图4 硬件在环仿真过程控制中的阻抗控制方法Fig.4 The impedance control of the hardware-in-the-loop simulation process
引入选择矩阵Λ进行地面机械臂末端力控制子空间和位姿控制子空间的分离。Λ∈R R6×6是一个对角元素只有0和1的对角矩阵,对角元素Λi= 1,i= 1,2,…,6表示相应自由度的控制模式是运动控制,Λi= 0,i= 1,2,…,6表示力控制起作用。
构建三种辅助误差εf,εp和ε,如式(5)所示:

其中, Md∈ R R6×6和 Bd∈ R R6×6为常正定矩阵; X∈R R6×1表示实际位置; Xc∈R R6×1表示期望位置;Fc∈R R6×1表示接触碰撞力。
因此,MTVF系统采用的基于阻抗的控制模型如式(6)所示:

其中,τ∈ RR6×1表示地面机械臂的关节力矩;J∈ RR6×6表示雅可比矩阵;∈ RR6×6表示笛卡尔空间的质量惯量矩阵;∈ RR6×6表示笛卡尔空间的速度项矢量;KD∈ RR6×6为常正定矩阵。
上述控制模型的稳定性可以通过李雅普诺夫直接法得到证明[14]。
4 全系统仿真及分析
MTVF系统通过数值模拟和硬件设备对空间机械臂抓捕操作开展有效的半物理验证。但由于机械系统惯性造成的时延和测量设备的噪声和时延,可能造成MTVF闭环系统在调试过程中的不稳定,这种不稳定甚至可能对系统硬件设备造成损坏。因此,在MTVF系统进行实时硬件在环操作以前,必须建立MTVF全系统仿真以对MTVF系统在接触碰撞过程的安全性和控制算法进行仿真试验和研究。待全仿真中遇到的问题都排除以后,再进行硬件在环的半物理仿真调试和试验。
MTVF全系统仿真中建立了空间机械臂动力学模型、自由漂浮目标物体动力学模型、地面模拟机械臂动力学模型和接触碰撞动力学模型。微重力环境下的空间机械臂和目标物体动力学模型与地球重力环境下的模拟机械臂动力学模型的关系如图5所示。Fo表示全局坐标系;Fb表示空间机械臂基座的体坐标系;Ft表示目标物体的体坐标系;li,i=1,2,…,7 表示模拟机械臂的臂杆长度;bi, i=1,2,…,9 表示空间机械臂的臂杆长度。 通过坐标变换,将末端执行器和目标物体的运动转换到模拟机械臂末端,实现模拟机械臂对空间机械臂和目标物体的跟随。同时,通过接触碰撞动力学计算模拟机械臂末端受到的六维广义碰撞力,并传递给末端执行器和目标物体。
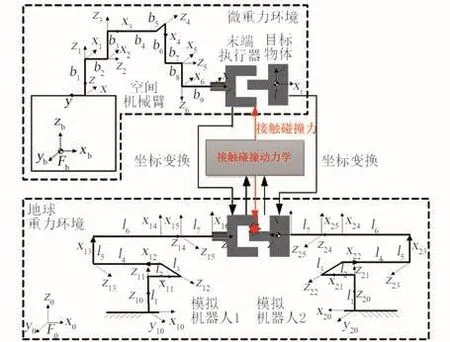
图5 MTVF全系统仿真动力学模型间的关系示意图Fig.5 Relationship between the dynamic models in the MTVF
MTVF全系统仿真的流程图如图6所示。首先,针对给定的在轨任务进行空间机械臂的控制算法设计。之后,进行MTVF全系统仿真验证控制算法的有效性和接触碰撞过程中硬件设备的安全性。如果MTVF全系统仿真结果的碰撞力可接受,则进行MTVF系统对在轨任务的验证,否则重新进行空间机械臂控制算法的开发设计。最后,对MTVF系统的验证结果进行分析。

图6 MTVF全系统动力学仿真流程示意图Fig.6 Dynamic simulation flowchart of the entire MTVF system
MTVF全系统仿真在MATLAB/Simulink环境下搭建,如图7所示。空间机械臂和目标物体动力学模型处于微重力环境,模拟机械臂动力学模型处于地球重力环境。动力学模型的坐标系关系如图5所示。模拟机械臂和空间机械臂的DH参数分别如表1、2所示,其臂杆长度如表3所示。末端执行器和目标物体间的接触碰撞模型参数如表4所示。
本文分别建立了空间机械臂接近阶段和抓捕阶段的MTVF全系统仿真对模拟机械臂的跟踪性能和接触碰撞过程中MTVF系统硬件设备的安全性进行研究。
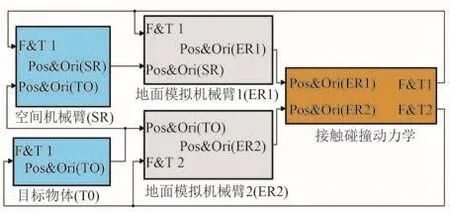
图7 MTVF全系统仿真示意图Fig.7 Simulation model of the entire MTVF system

表1 地面模拟机械臂DH参数Table 1 DH parameters of the emulation manipulator
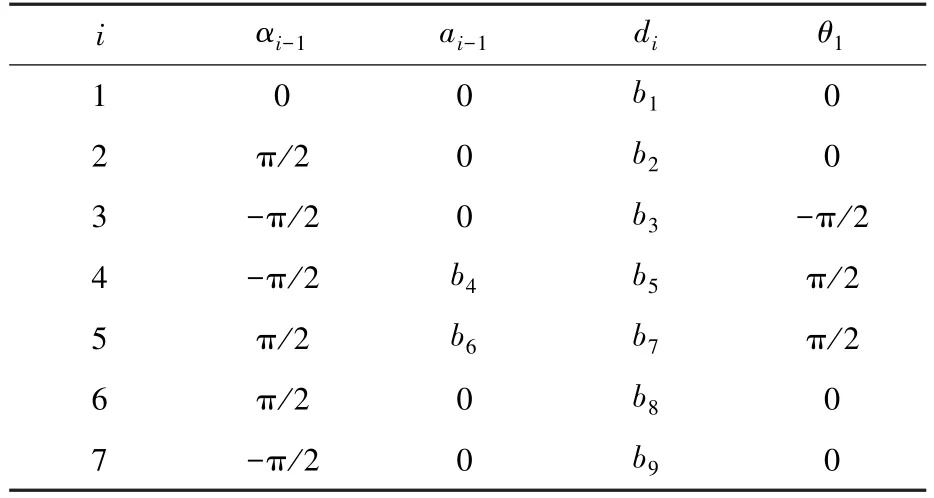
表2 空间机械臂DH参数Table 2 DH parameters of the space manipulator
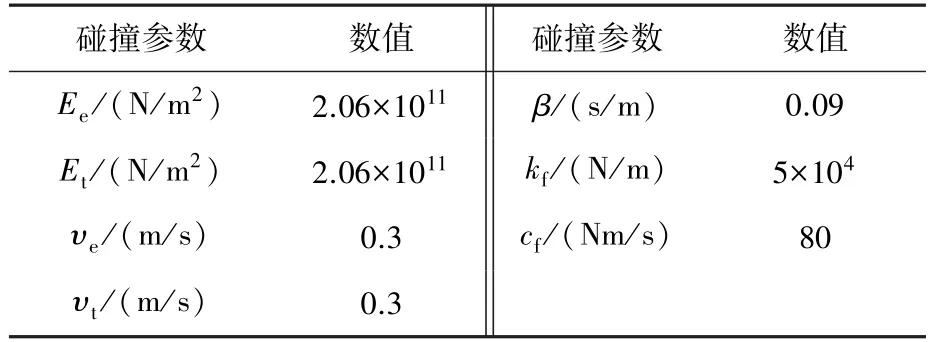
表4 末端执行器与目标物体间的接触碰撞参数Table 4 Contact parameters of the end-effector and the target object
4.1 接近阶段
MTVF全系统仿真中,模拟机械臂在空间机械臂末端执行器和目标物体的驱动下模拟其三维运动。其中,空间机械臂末端执行器的位置从[0.73, -0.89,1.69]m( ) 运动到 [1.19, -0.19,2.25]m(),末端最大速度为0.03 m/s;目标物体做旋转速度为0.5 deg/s的自由运动。模拟机械臂对末端执行器和目标物体的跟踪曲线分别如图8、9所示。图中的纵坐标为位置和姿态,分别由笛卡尔坐标系下的位置和欧拉角的欧氏范数表示。

图8 接近阶段地面模拟机械臂对空间机械臂的轨迹跟踪Fig.8 Trajectory tracking of the space robot during the approaching phase

图9 接近阶段地面模拟机械臂对目标物体的轨迹跟踪Fig.9 Trajectory tracking of the target object during the approaching phase
仿真结果表明,在接近阶段,模拟机械臂能够实现对自由漂浮目标物体的跟踪,以及对空间机械臂在接近阶段的末端轨迹的跟踪。
4.2 抓捕阶段
在抓捕阶段,模拟机械臂装载的末端执行器和目标物体发生接触碰撞,碰撞力传递给空间机械臂和目标物体动力学模型得到末端执行器和目标物体的运动,然后再用这个运动通过MTVF过程控制系统驱动模拟机械臂末端在三维空间运动。
MTVF全系统仿真中搭建了2种具有不用捕获速度的空间机械臂对目标物体实行抓捕的模型。其中,第一种抓捕过程的捕获速度为0.1 m/s,第二种抓捕过程的捕获速度为0.02 m/s。 在第一种抓捕过程中,模拟机械臂在第一次发生接触碰撞后无法对空间机械臂和目标物体进行跟踪,而且碰撞力和力矩超过了MTVF系统硬件设备的可承受范围。说明第一种抓捕过程非常危险,不能对第一种抓捕工况开展MTVF系统试验。降低抓捕速度后,进行了第二种抓捕过程的MTVF全系统仿真。第二种抓捕阶段模拟机械臂对末端执行器和目标物体的跟踪曲线分别如图10、11所示。在抓捕过程中,末端执行器与目标物体发生了多次碰撞。图12给出了抓捕过程中末端执行器和目标物体受到的碰撞力和力矩。
仿真结果表明了搭建MTVF全系统仿真的必要性和对于开发与调试MTVF系统的帮助。在空间机械臂抓捕目标物体过程中,将发生多次末端执行器与目标物体之间的接触碰撞。在第一种抓捕工况基础上降低抓捕速度,开展了第二种抓捕工况的MTVF全系统仿真。在第二种抓捕工况中,末端执行器和目标物体间的最大碰撞力和碰撞力矩分别为138 N和28 Nm,模拟机械臂能够实现对空间机械臂和目标物体的跟踪,末端执行器与目标物体间的碰撞力/力矩在MTVF系统硬件设备的承受范围内。

图10 抓捕阶段地面模拟机械臂对空间机械臂的轨迹跟踪Fig.10 Trajectory tracking of the space manipulator during the grasping phase

图11 抓捕阶段地面模拟机械臂对目标物体的轨迹跟踪Fig.11 Trajectory tracking of the target object during the grasping phase

图12 抓捕阶段末端执行器与目标物体间的接触力和力矩曲线Fig.12 Contact forces and torques during the grasping phase
MTVF全系统仿真是MTVF系统进行空间机械臂地面验证试验的仿真支持。通过MTVF全系统仿真的验证,确保了空间机械臂控制算法的有效性和接触碰撞过程中硬件设备的安全性。
5 MTVF系统试验验证
本文通过建立2种典型试验对MTVF系统的可行性及其控制算法的有效性进行分析验证。这2种典型试验分别是MTVF系统模拟低重力自由落体运动试验和MTVF系统模拟空间机械臂运动试验。
5.1 低重力自由落体运动试验
低重力自由落体碰撞过程理论上比较成熟,可以作为地面验证系统具有代表性的试验对象。因此,本文将通过MTVF系统模拟低重力自由落体运动对不使用控制算法和使用控制算法的MTVF系统进行试验,从而对MTVF系统控制算法的有效性进行验证,并为后续进行的MTVF系统模拟空间机械臂运动试验奠定基础。
MTVF系统模拟低重力自由落体运动试验将对小球在g/10环境下的自由落体运动进行模拟。小球自由落体的仿真参数如表5所示。
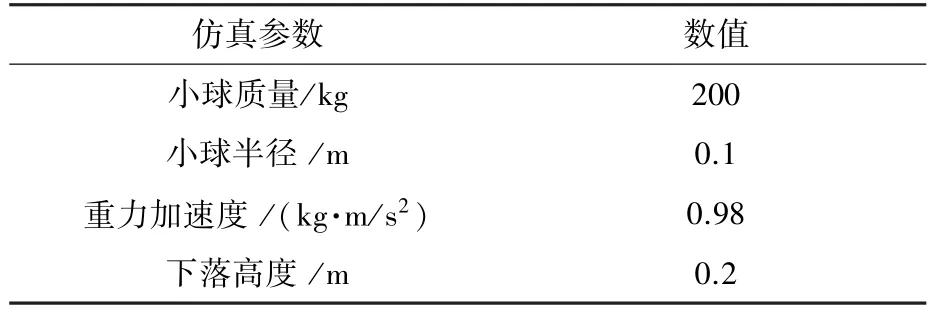
表5 自由落体的仿真参数Table 5 Parameters of the simulation model
由于MTVF系统的带宽、采样频率和时延等因素的影响,不使用控制算法的MTVF系统模拟低重力小球自由落体运动试验中接触碰撞过程的碰撞力增加,MTVF系统能量增加,导致MTVF系统不稳定,小球越弹越高,如图13所示。此时,MTVF系统发散,试验中小球的接触碰撞过程无法真实体现小球自由落体的接触碰撞过程。
加入第3章中提出的控制算法,MTVF系统试验结果如图14所示。MTVF系统稳定,MTVF系统模拟低重力小球自由落体运动试验中接触碰撞过程的碰撞力不断减小,小球越弹越低,符合小球自由落体接触碰撞过程的现象。
试验结果表明,MTVF系统的控制算法保证了MTVF系统的稳定和小球接触碰撞过程的等效阻抗,说明MTVF系统控制算法的有效性。

图13 未施加控制算法情况下小球的运动和接触力曲线Fig.13 Motion and contact force without the control method

图14 施加控制算法情况下小球的运动和接触力曲线Fig.14 Motion and contact force with the control method
5.2 空间机械臂运动试验
MTVF系统模拟空间机械臂运动试验的目的有以下2个方面:①对MTVF系统跟踪空间机械臂末端运动的性能进行验证;②对空间机械臂运动过程受外界干扰力工况下的空间机械臂控制算法的性能进行验证。
本文搭建了微重力环境下的7自由度空间机械臂,作为MTVF地面验证系统的仿真对象,如图15所示。7自由度空间机械臂将执行从初始构型运行到捕获位置的运动指令,运行过程中空间机械臂仿真模型受到人为施加给机械臂末端的外界干扰力。空间机械臂运行过程中末端的运动仿真结果传递给地面模拟机械臂进行跟踪,同时,空间机械臂末端受到的外界干扰力传递给空间机械臂动力学仿真模型计算下一步的末端运动。
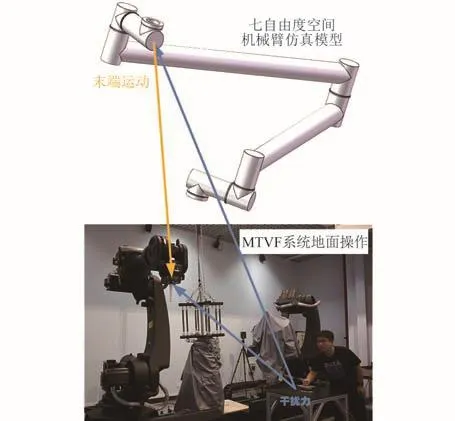
图15 MTVF系统的地面验证实验Fig.15 Ground verification experiment of MTVF
图16 是空间机械臂运动过程中地面模拟机械臂跟踪空间机械臂仿真结果的跟踪曲线,图17是空间机械臂运动过程中受到的外界干扰力曲线。整个空间机械臂运动过程中,共受到3次人为施加给空间机械臂末端的干扰力,最大外界干扰力小于350 N。受到外界干扰力后,空间机械臂末端发生振动,地面模拟机械臂的位置跟踪误差小于5 mm,姿态误差小于0.04°。
图16 空间机械臂末端受干扰力下地面模拟机械臂对空间机械臂的跟踪Fig.16 Trajectory tracking of the space manipulator during operation

图17 空间机械臂运行过程中受到的干扰力曲线Fig.17 Time history of the disturbance force during the operation of the space manipulator
试验结果表明,MTVF系统能够对空间机械臂末端运动的仿真结果进行跟踪,具备在地面对空间机械臂进行三维半物理验证的能力。
6 结论
1)本文提出了一种对空间机械臂任务进行高保真仿真和验证的半物理仿真地面验证平台MTVF。由于MTVF系统的设计与研发采用了定制的工业机械臂作为空间机械臂的地面模拟装置,它具有采样频率高、响应速度快和动力学模拟精度高的特点,能够有效地模拟空间机械臂微/低重力环境下在轨操作任务的动力学特性。
2)为有助于MTVF的研发和调试,建立了MTVF全系统仿真以保证在任务验证过程中MTVF系统硬件设备的安全并验证空间机械臂控制算法的可靠性。
3)通过小球自由落体的试验和空间机械臂执行在轨操作任务的试验,对MTVF系统的可行性及其控制算法的有效性进行了分析验证。
