基于IPMC材料的柔性抓捕机构设计
2019-04-25尹国校岳英豪何青松李宏凯
尹国校,岳英豪,于 敏,何青松,李宏凯,陈 萌
(1.南京航空航天大学仿生结构与材料防护研究所,南京200016;2.南京航空航天大学机电学院,南京200016;3.上海宇航系统工程研究所,上海201109)
1 引言
空间飞行器的在轨抓捕技术对解决失效卫星的在轨回收等问题具有重要意义。传统抓捕方式一般采用具有机械传动能力的空间抓捕执行器、刚性机械臂等载荷设备来实现对目标的抓捕,例如,孙冲等针对自由翻滚的故障卫星提出了一种外包络抓捕方式,研究了机械臂的最优路径规划以及抓捕过程中关节角的约束问题[1];介党阳等提出一种空间网状捕获方式,提高了末端执行器的抓捕容差范围[2];Yoshida等提出一种利用柔性抓捕结构包裹失效卫星的方法,但此方法对小型卫星适用性较差[3]。由于抓捕执行器和机械臂多以金属材料制造,采用电机、减速器和制动器等机构驱动传动方式,整体质量惯性大,机构的构型及功能设计复杂[4-6]。随着空间技术的发展,未来的服务航天器会逐步走向小型化、轻型化和智能化[7]。
离子聚合物金属复合材料(Ionic Polymermetal Composite,IPMC),是一种新型离子型电活性聚合物,构造类似于“三明治”结构,中间层是阳离子交换树脂(通常采用杜邦公司的Nafion膜),基膜两侧是利用化学镀方法生成的贵重金属电极(如 Pt,Au,Ag,Pd 等)。 与形状记忆合金和压电陶瓷材料相比,IPMC具有驱动电压低、形变量大、反应迅速、质量轻、无噪音以及能量密度高等优点,因此又被称为“人工肌肉”,具有巨大的应用潜力。Hubbard等利用IPMC作为鱼鳍和鱼尾研制出一款水下机器鱼,其最大游速可达28 mm/s[8];彭瀚旻等利用四片IPMC制作了小型抓取机构,在3 V直流电压下能够抓取1.6 g的物体[9];美国国家航空航天局利用IPMC在交流电压下能够往复摆动的特点,将其作为除尘装置应用在太空探测器相机镜头上,同时指出IPMC能够适应高真空、低温的空间环境[10];Shahinpoor等利用四片IPMC制备了简易的抓捕机构,在5 V的电压下能够抓起10.3 g的小石子[11]。
针对目前空间飞行器在轨捕获机构存在传动结构复杂、耗能较大、操作难度和维护成本高等缺点,本文基于IPMC功能复合材料设计一款结构简单、操作方便、驱动电压低、功耗小以及安装储存方便的柔性抓捕机构,面向空间非合作目标卫星的在轨柔性捕获,旨在降低因采用传统对接机构、机械臂等捕获操作机构带来的控制技术难度和发射重量成本问题[12-13],为柔性抓捕机构的小型化和轻量化设计提供参考。
2 抓捕机构设计
2.1 IPMC工作机理
如图1所示,IPMC材料内部主要包括固定阴离子、可迁移阳离子、水分子以及水合阳离子。当在IPMC两侧施加较低的电压时(通常为1~5 V),由于其内部的阴离子固定在高分子链上不会发生移动[10],而可移动的阳离子在电场力的作用下会结合水分子形成水合阳离子并向阴极移动聚集,从而使得膜内两侧的水分子产生浓度差,导致阴极膨胀阳极收缩,宏观上表现出弯曲现象。在交变电压下IPMC可产生往复摆动。

图1 IPMC驱动原理图[14]Fig.1 Schematic diagram of IPMC driving[14]
2.2 IPMC制备
IPMC柔性抓捕机构抓取物体时,首先通过IPMC的弯曲变形包裹被抓物体,然后依靠其端部输出力抓取物体,因此IPMC若要成功抓取物体就需要有足够的弯曲变形和输出力。根据课题组前期工作研究[15],增加Nafion基膜厚度可以有效提高IPMC的端部输出力,而退火温度能有效控制基膜刚度。本文利用化学镀方法在Nafion基膜表面生成金属电极,其制备过程大致如下:①基膜浇铸:将Nafion溶液和DMF(N,N-二甲基甲酰胺)溶液混合均匀放入70℃真空干燥箱中固化成膜,随后退火消除基膜内应力;②基膜粗化:提高基膜粗糙度,增加电极和基膜的接触面积,有利于Pt颗粒沉积;③离子吸附:将基膜浸泡在铂氨溶液中完成Pt+离子吸附;④主化学镀:利用NaBH4还原剂将基膜内的Pt+还原为铂金属颗粒沉积在基膜表面;⑤次化学镀:为了降低表面电阻,提高铂电极层厚度需要进行次化学镀,方法和主化学镀类似;⑥离子交换:将化学镀后的样品浸泡于锂溶液 2天,使 Li+取代 H+;⑦将制备的IPMC存放于去离子水中备用。
按照上述步骤,本文制备了长为25 mm、宽为5 mm、厚为0.5 mm的IPMC试样。
2.3 抓捕机构模型设计及导线排布
为了提高抓捕机构的适用范围,考虑被抓物体形状的多样性,分别设计了三指、四指和五指抓捕机构,并对这三种抓捕机构进行了测试分析(详见第3.3节)。结果发现:圆周方向均匀分布的五指抓捕机构能够包裹更多形状的物体,更容易完成物体的抓取,提高抓捕机构的适用范围。图2所示为3D打印的五指抓捕机构模型,此模型在圆周方向上均匀分布五个凹槽用于抓捕机构IPMC驱动部件的组装和拆卸。

图2 抓捕机构示意图Fig.2 Schematic diagram of gripper
合理的导线排布能有效降低IPMC柔性抓捕机构的安装、操作难度,提高抓捕机构的可行性。因此,为方便安装超柔细导线(导线直径为0.3 mm),在设计和打印抓捕机构模型时,在其内部留出直径为0.6 mm的线孔,将超柔细导线排布其中,此方法有效避免了导线之间的缠连,也便于排查每根导线的连通情况。
2.4 IPMC端部修饰
抓捕机构的单指由IPMC和指端结构两部分组成,两者粘合后的长度即单指的工作长度。指端结构两侧分别安装勾爪和粘附材料,如图3所示。

图3 IPMC端部修饰图Fig.3 Schematic diagram of end-modified IMPC
抓捕机构抓取物体时其单指要有足够的长度来包裹物体,若仅增加IPMC的长度则会导致其端部刚度下降;其次,若IPMC直接抓取物体,被抓物体可能会出现滑落现象。因此,在保证IPMC总长度不变的情况下,通过端部修饰添加指端结构来增加单指工作长度和摩擦力并保证其端部刚度。
IPMC的端部修饰主要通过以下途径实现:①在IPMC端部连接3D打印的指端结构来增加单指长度和端部接触面积,图3(a)、(b)中IPMC端部的白色部分即是3D打印的指端结构;②在指端结构两侧分别安装勾爪和粘附材料,勾爪能使IPMC向外弯曲时勾取物体,粘附材料能有效提升IPMC与被抓物体之间的摩擦力,避免被抓物体滑落。组装后的抓捕机构可以安装在移动平台(机械臂)上,如图3(b)所示。
3 试验分析
利用测试平台对单指IPMC的端部输出力、位移以及电流特性进行相关分析,之后对端部修饰的两指和三指抓捕机构进行抓取试验分析以检验端部修饰效果,最后组装五指抓捕机构并进行相关试验分析。
3.1 测试平台
IPMC测试平台如图4所示,主要包括工作台、信号发生器、位移传感器模块、力测试模块、电性能测试模块和计算机等。测试条件为大气环境,测试时将IPMC一端夹持在工作台上的电极中,另一端自由放置。自由端一侧接触力传感器,另一侧放置激光位移传感器,激光位移传感器激光点与IPMC自由端相距10 mm。
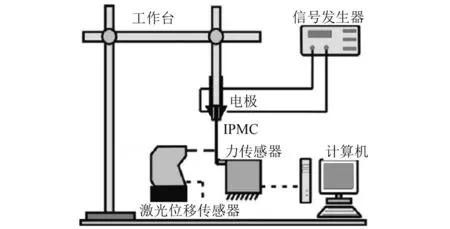
图4 IPMC测试平台示意图Fig.4 Schematic diagram of IPMC test platform
当在IPMC两端施加电压信号时,其位移、端部输出力、电流、电阻和功率等信号可通过计算机采集处理获得。
3.2 单指性能测试与分析
利用上述测试平台可以测得单指IPMC工作时的电流I、电阻R、功率P、输出力F以及位移d的变化情况。图5表示单指IPMC在直流电压U为3 V时,其位移、输出力、电流、电阻和功率随工作时间的变化规律。

图5 IPMC在3 V直流电压下的输出特性Fig.5 Output characteristics of IPMC at 3 V DC voltage
从图5(a)可以看出IPMC在直流3 V电压下,其位移先迅速增大后缓慢减小,最大形变位移为6.85 mm,工作18 min后位移衰减至3.37 mm。这是因为IPMC工作时其内部水分会发生电解挥发和扩散散失,使基膜内的水分减少,IPMC开始出现蠕变现象,导致位移下降。IPMC的工作相当于放电过程,因此IPMC的工作电流随着工作时间的增加会逐渐减小。由公式P=IU可知,由于IPMC的工作电压不变,工作电流逐渐减小,其功率会出现和电流相同趋势的下降;由公式P=I2R和图5(b)可以看出,IPMC在驱动过程中,其电阻会逐渐增大。当在IPMC两侧施加电压信号时,随着其内部离子的迁移,IPMC端部的输出力会逐渐增加,由于离子的迁移需要迁移时间,因此其输出力会在一个时间段(0~14 s)内逐渐增大,如图5(c)所示。
综上可知:此抓捕机构驱动电压低、功耗小,在3 V直流电压下工作18 min,其位移仍保持3.37 mm左右,而功率仅0.17 W左右。
3.3 五指抓捕结果与分析
将端部修饰后的两指、三指和五指分别安装于抓捕机构的凹槽中,并将此抓捕机构固定在机械臂上进行抓捕试验分析,测试端部处理效果。
图6表示端部修饰后的两指和三指能有效抓起设定的物体,其中:(a)、(b)表示端部修饰后的两指成功抓起泡沫圆柱体;(c)、(d)表示端部修饰后的三指成功抓起乒乓球和纸杯。从图6(a)、(c)可以看出,端部连接的粘附材料有效增加了抓捕机构端部与被抓物体之间的摩擦力,降低了被抓物体滑落的可能。从图6(b)、(d)可以看出,端部连接的勾爪使抓捕机构具有勾取物体的能力,拓展了抓捕机构的抓取方式。与两指抓取相比,三指抓取更加平稳、抓捕物体适用范围更广,能够抓取体积(或质量)相对较大的物体。

图6 端部修饰后的抓取效果Fig.6 Grabbing by two fingers after end modification
综上可知:IPMC经端部修饰后,增加了抓捕机构的可靠性,保证了其端部刚度,有效避免了被抓物体滑落的可能,使得抓捕机构的适用范围大幅提高。
图7表示五指抓捕机构利用内收方式成功抓取球形、不规则柔软体和纸杯形物体。其中:(a)表示抓捕机构五指张开靠近被抓物体(+3 V);(b)表示抓捕机构五指内收紧紧抓牢物体(-3 V);(c)表示物体被成功抓起。同理不规则柔软体和纸杯形物体也是类似抓取原理。

图7 抓捕机构内收抓取过程Fig.7 The inward grasping process of the gripper

图8 抓捕机构外翻抓取过程Fig.8 The outward grasping process of the gripper
图8 表示抓捕机构利用外翻勾取方式勾起框形物体。具体抓取过程如下:(a)表示抓捕机构五指内收靠近被抓物体,此时施加-3 V的电压使五指向内弯曲,避免刮擦被抓物体;(b)表示抓捕机构五指全部张开勾取物体,此时施加+3 V电压;(c)表示框形物体被成功抓起。
上述可知:此柔性抓捕机构结构简单,操作方便,通过控制电压信号(±3 V)能有效控制抓捕机构的张开和闭合状态,实现了内收和外翻两种不同方式的抓取。
4 结论
针对空间飞行器在轨抓捕机构存在整体质量惯性大、结构复杂、操作维护成本高等缺点,利用电活性聚合物IPMC研制出一款结构简单、操作方便、功耗小、驱动电压低的五指柔性抓捕机构。
单指测试表明,抓捕机构在直流3 V电压下的最大弯曲位移为 6.85 mm,工作时间可达18 min,功率仅0.17 W左右。
五指抓捕结果表明,IPMC经端部修饰后,有效提升了抓捕机构的可靠性,保证了其端部刚度,有效避免了被抓物体滑落的可能,使得抓捕机构的适用范围大幅提高,实现了内收和外翻两种不同方式的抓取功能。
未来随着IPMC材料输出性能的不断优化和改善,基于IPMC驱动的柔性抓捕有望应用于空间飞行器的在轨捕获,以解决目前传统机械抓捕存在的问题。
