BMW公司i3增程器的控制分析和模型验证
2019-04-23eong
【】 .eong . . . .
0 前言
多年以来,美国阿贡国家实验室一直致力于研究车辆性能和不同类型车辆的控制行为,例如传统车辆、混合动力车辆、插电式混合动力车辆和电池动力车辆[1-4]。不仅对正常环境温度(22 ℃)和热机状态进行了分析,而且也对不同环境温度(-7~35 ℃)和冷机状态进行了分析。利用美国阿贡国家实验室的先进动力总成研究装置(APRF),用1台置于环境舱中的四轮驱动底盘测功机,在不同热工况条件下获取试验数据。APRF能够复制-7~35 ℃范围内的热状态,并且具有日照模拟功能。基于不同热状态下获得的试验数据和分析,利用Autonomie开发并实现车辆仿真模型。Autonomie是一款具有高可信度、直观的车辆仿真工具,能够预估不同类型的车辆性能,尤其是燃油经济性。本文从试验数据出发,分析了2014款BMW i3增程器(REX),开发了包含热因素的车辆仿真模型。
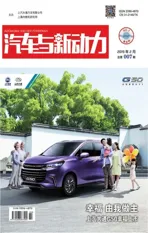
BMW i3-REX是一种带有增程发动机的串联插电式混合动力(图1)。其包括1台0.65 L直列2缸增程发动机和1台26.6 kW功率的发电机、1台用于牵引的125 kW功率的永磁同步电动机以及1个18.8 kW·h电能的锂离子电池。由于是增程器车辆(或插电式混合动力车辆(PHEV)),在车辆起动时是以电动车辆(EV)模式运行,当荷电状态(SOC)降低到设定状态,车辆变为混合动力车辆(HEV)模式。美国环境保护署(EPA)标定全电动续航里程为116 km,总行驶里程可达241 km。
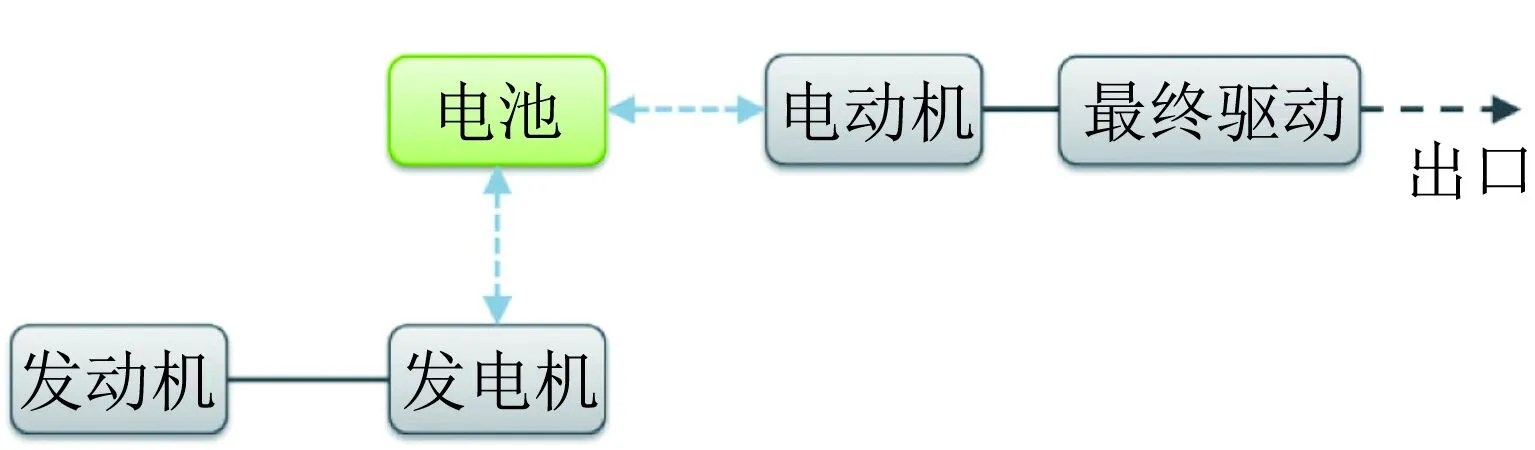
图1 BMW i3-REX结构
1 部件性能分析
汽车上的零部件如发动机、电池、电动机、发电机和车轮的性能均受到多种条件影响,其中包括温度条件造成的性能变化。部件性能通常是指最大输出功率、扭矩以及效率。首先将分析这些部件性能以建立车辆的各部分模型。
1.1 发动机模型
发动机部件模型主要包括发动机最大扭矩MAP图和油耗率MAP图。油耗率MAP图受温度影响。当发动机温度较低时,比如冷起动时,油耗率远高于发动机温度较高时的工况(图2)。油耗率MAP图包括发动机转速、扭矩和油耗率。模型中,通过给定发动机转速和扭矩可确定发动机油耗率。为了根据温度应用发动机特性,在计算油耗率时增加发动机温度参数。模型中,用发动机温度系数乘以根据转速和扭矩获得的发动机油耗率[9-10],并可基于发动机冷却液温度设定发动机温度。

图2 根据发动机温度获得发动机油耗率
1.2 电池模型

图3 根据电池SOC和组件温度获得电池内电阻
串联式PHEV的主要功率源是电池。电池电阻直接与效率相关,同时也受温度影响。电池模型主要与SOC和温度相关。图3显示了基于试验数据,并根据SOC和温度获得的电池内电阻应用图。其中电池模型的一些变量,如内电阻、开路电压或极化效应,均由试验数据推出。
1.3 车轮模型
车轮或轮胎模型是另一个生成准确仿真结果的关键模型。这一系统损失极易受温度影响。因此,基于试验数据,分析了轮胎阻力系数变化并将其应用于仿真模型。
2 正常工况下的控制分析
首先对正常温度工况下的车辆控制进行分析。采用的车辆参数为暖机状态起动下,环境温度为22 ℃,不使用采暖通风与空调(HVAC)。
2.1 电量消耗/保持模式控制
处于标准温度的增程电动车辆,首先以电动车辆模式驱动,这是所谓的电量消耗(CD)模式。电池SOC降低到设定值后,车辆转换为电量保持(CS)模式,在该模式中,发动机运行以保持电池SOC处于某一适当状态。为了检测车辆驾驶模式何时从CD模式转换到CS模式,根据电池SOC分析车轮输出功率(图4)。当电池SOC降至16%以下,发动机无法运行。根据这一结果确定了电池SOC为16%时,需要从CD模式转换到CS模式。

图4 根据电池SOC获得车轮输出功率
2.2 发动机开/关控制
在CD模式下,由于车辆作为纯电动车辆(BEV)运行,只有电池提供所需的驱动功率,因此在CD模式无需分析其他运行特性。然而,在CS模式下,需要更加复杂的车辆控制模型以实现实际车辆试验结果。首先需要确认的是起动和停止发动机的条件。如图5所示,当电池SOC低于16%时,起动发动机。此时存在一个变化范围为15.5%~16.0%的电池SOC迟滞区间。当SOC在15.5%以下时,当车速超过20.1 km/h时,起动发动机。图6中能够看出使发动机停止运行的条件。当车速降至10.5 km/h以下,使发动机停止运行。根据图6的数据可以得出发动机起动或停机是由SOC和车速决定的。

图5 发动机起动时,根据电池SOC获得车速

图6 发动机关闭时,根据电池SOC获得车速
①为了符合原著本意,本文仍沿用原著中的非法定单位——编注。
2.3 发动机运行
发动机起动后,首先需要确定发动机输出功率,包括发动机转速和扭矩。由于串联HEV中发动机与车辆驱动轮解耦,发动机转速和扭矩可在无限制条件下得以确定。图7和图8分别显示通过试验数据获得的发动机转速范围和扭矩。发动机转速分为3个范围,包括高速、中速和低速(图7)。此外,发动机输出扭矩分为高扭矩和低扭矩。发动机运行工况由电池SOC、车辆初始起动和热状态决定(图8)。
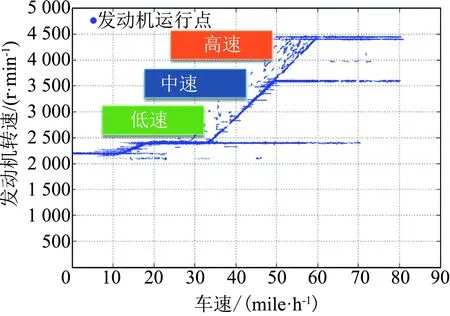
图7 根据车速获得发动机输出转速

图8 根据车速获得发动机输出扭矩
2.3.1高SOC模式
CS模式下,当SOC高于15.5%,电池无需充电。由于高SOC模式下电池需要放电,发动机在中速、低扭矩工况下运行(图9和图10)。

图9 根据高SOC模式下的车速获得发动机输出转速
2.3.2中SOC模式
SOC在13.5%~15.5%的中间范围时,电池需要保持SOC状态。图11和图12示出的是中SOC模式下发动机在中速、高扭矩工况下的运行。
图10 根据高SOC模式下的车速获得发动机输出扭矩
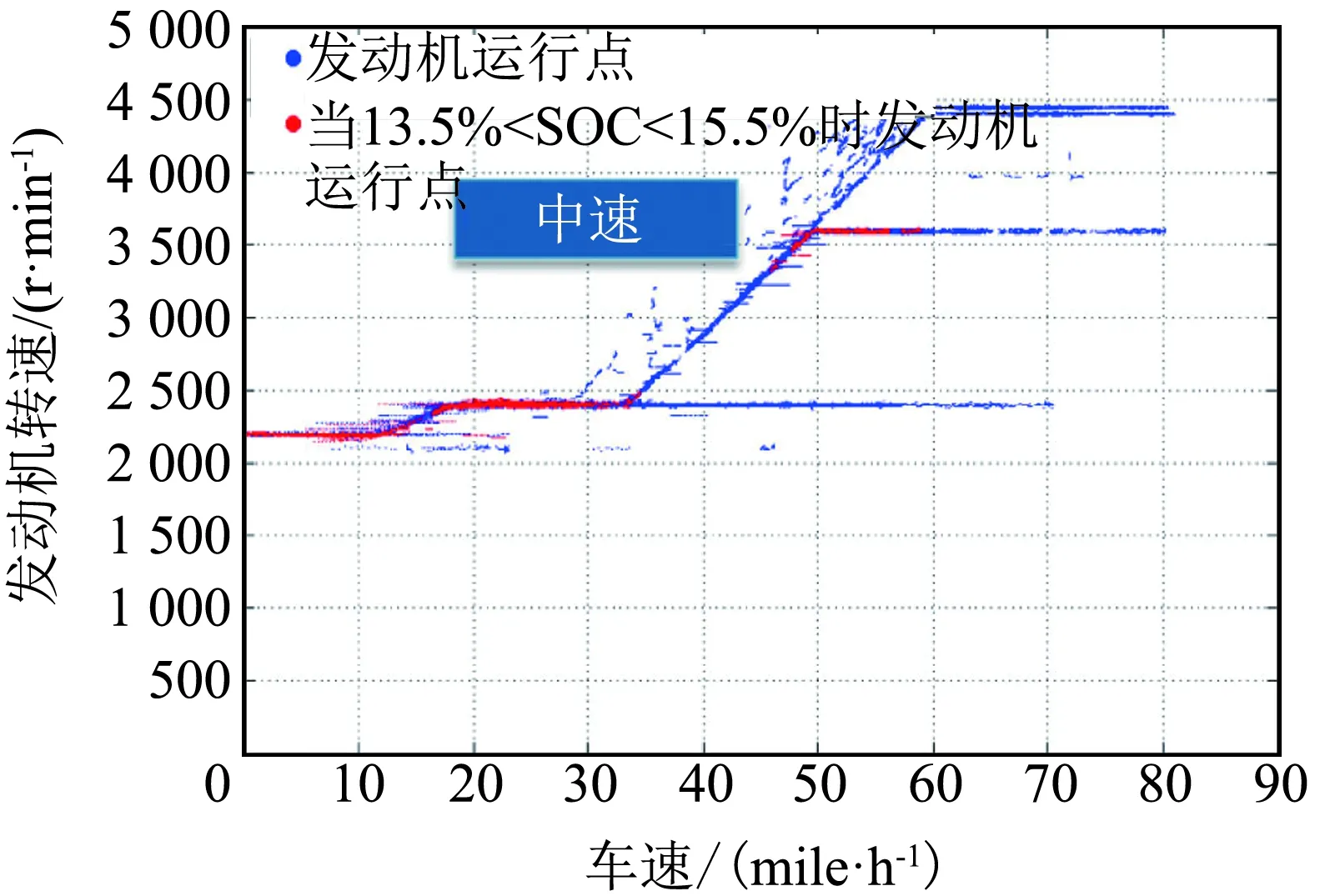
图11 根据中SOC模式下的车速获得发动机输出转速

图12 根据中SOC模式下的车速获得发动机输出扭矩
2.3.3低SOC模式
当SOC低于13.5%时,电池需要充电以保持SOC处于适当状态。发动机需要提供较高的功率给电池充电,电池利用发电机生成的剩余能量驱动车辆。发动机在高转速和高扭矩工况下运行(图13和图14),处于低SOC模式。
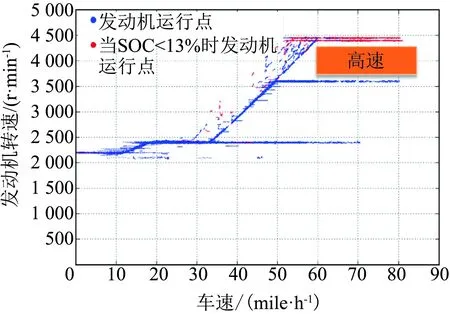
图13 根据低SOC模式下的车速获得发动机输出转速
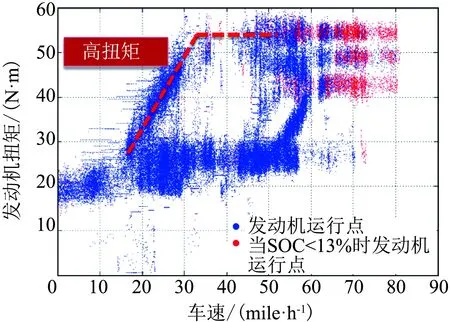
图14 根据低SOC模式下的车速获得发动机输出扭矩
2.3.4初始起动运行模式
当车辆以CS模式起动时,采用的是一种不同的发动机运行模式。在车辆起动后的300 s内,发动机在低速、低扭矩工况下运行(图15和图16)。然而,当电池SOC低于13.5%,如低SOC模式,发动机高速和高扭矩的工况则符合低SOC模式规定。
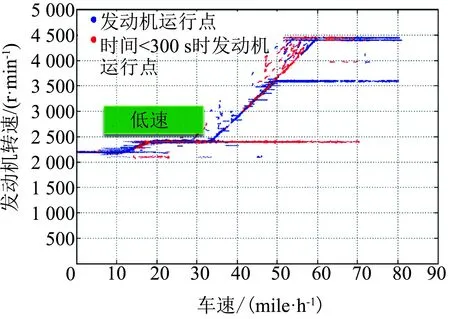
图15 根据初始起动运行模式下的车速获得发动机输出转速
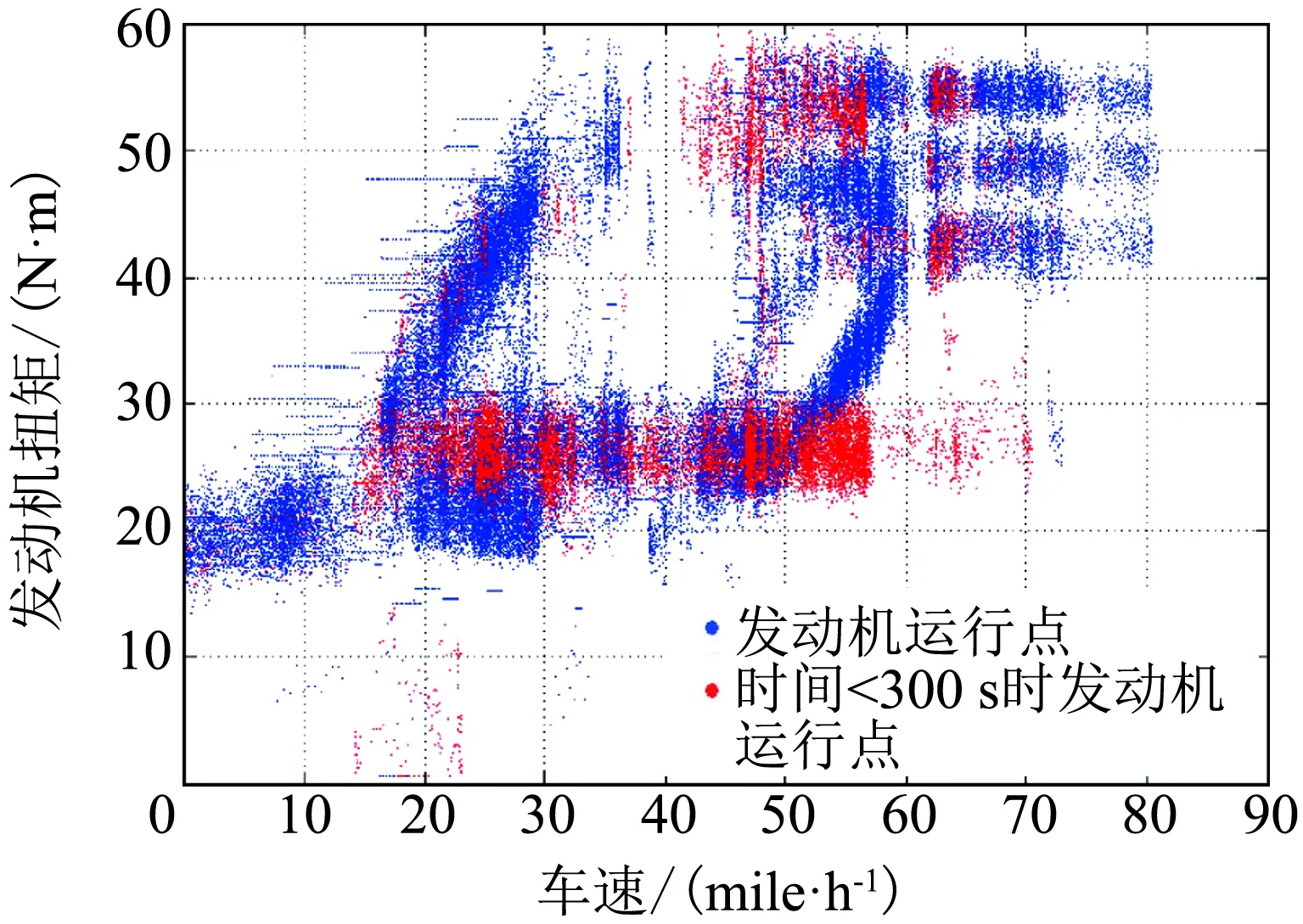
图16 根据初始起动运行模式下的车速获得发动机输出扭矩
3 热状态对控制的影响
热状态如环境温度、发动机起动温度和HVAC运行不仅影响到各部件效率,而且影响车辆控制。当初始发动机温度低(冷起动)或使用加热器运行时,需采用不同控制逻辑以改善燃油经济性、排放性或其他性能。
3.1 冷起动
当车辆进入CS模式(SOC低于16%)并且初始发动机温度低时,发动机保持在工作状态直到发动机温度升高至85 ℃以上(图17)。在试验数据的各环境温度工况下均采用这种逻辑控制方法。然而,在进行特殊试验确定运行工况之前,很难得到精确的发动机初始温度。在发动机温度升高至超过85 ℃以后,由于发动机在CS模式下反复运行,其温度不会降低80 ℃以下。
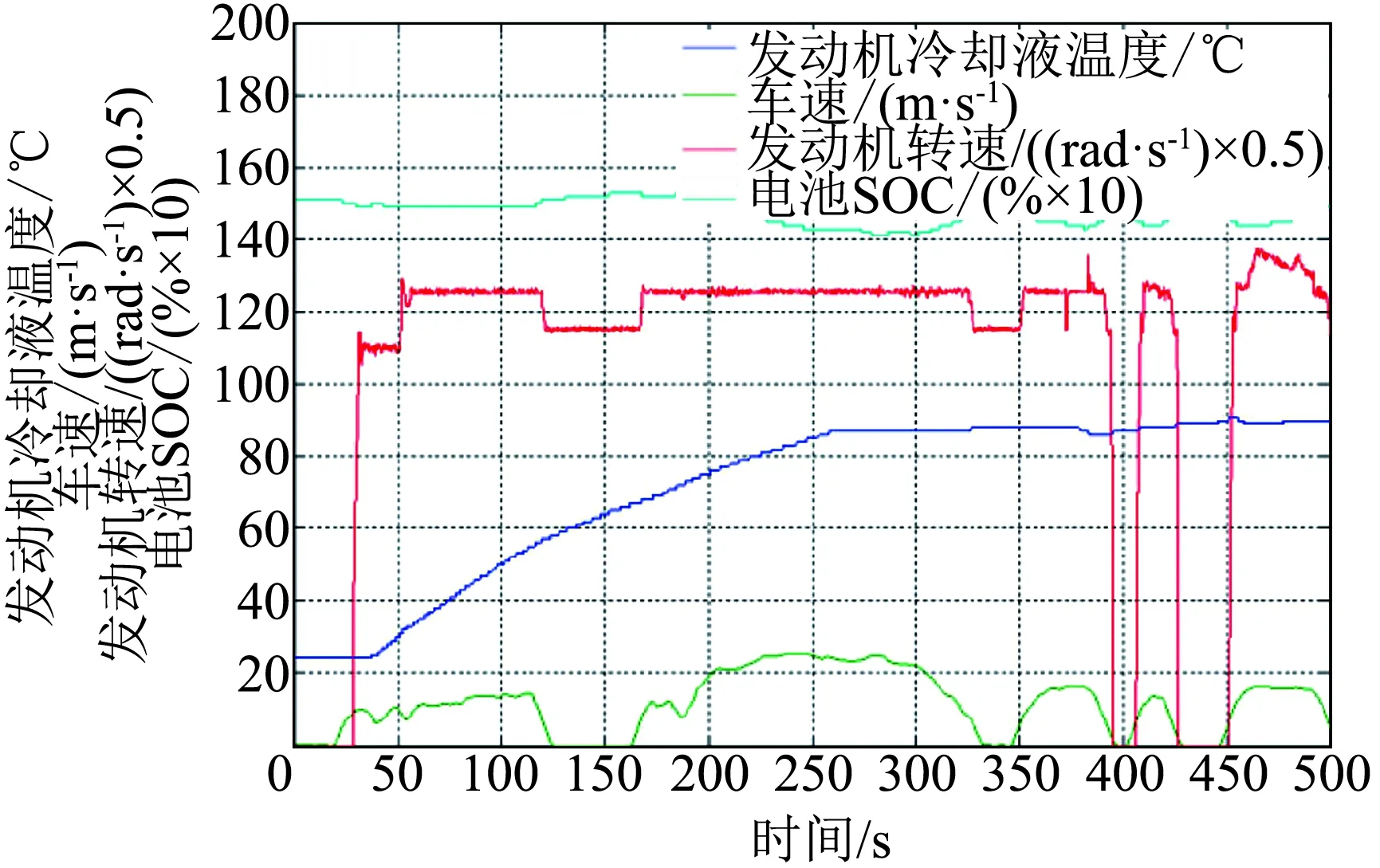
图17 发动机运行直到发动机温度升高至超过85 ℃
3.2 加热器运行
运行加热器时采用另一个控制逻辑。由于该车辆只采用电动热敏电阻(PTC)加热器进行机舱加热,而加热器则会消耗大量电能。因此,电池SOC应保持在适当范围。如图18所示,当SOC低于13.5%,发动机保持低负荷状态,并且加热器处于运行状态中。

图18 加热器处于运行状态时,当电池SOC低于13.5%发动机运行
运行加热器时,发动机运行工况不同。环境温度低且使用加热器运行时,发动机输出功率高于其他环境温度工况(如图19所示)。此外,电动加热器会消耗大量功率,因而发动机或发电机应该比在其他工况下提供更大功率。

图19 在低环境温度工况下运行加热器时,发动机输出功率高于其他环境温度工况
4 模型开发和验证
基于分析,利用Autonomie建立了车辆模型,包括设备和控制器。其中发动机、电池、牵引电动机、车轮和底盘均建立了热模型。
4.1 控制模型
根据对BW i3-REX控制分析(图20)开发了车辆级控制器。首先,确定驱动模式(CD或CS)。如果在CS模式下,发动机起动/停机由车速和电池SOC决定。最后,发动机转速和扭矩由SOC确定。然而,如果发动机温度过低或在低SOC工况下运行加热器,将采用热控制。

图20 BMW i3-REX控制分析总结
4.2 系统验证
利用Autonomie开发了BMW i3-REX正向仿真模型,包括部件模型和管理控制器模型(图21)。为了验证车辆仿真模型,在不同工况下进行模拟,详细说明见表1和表2。大多数实例中,试验和仿真之间的差异小于5%。同时,电池SOC、油耗、发动机转速、扭矩,以及温度的试验和仿真结果一致(图22)。

表1 城市测功机测试(UDDS)循环下油耗和最终SOC的试验和仿真结果对比

表2 高速公路燃油经济性测试(HWFET)循环下油耗和最终SOC的试验和仿真结果对比

图21 2014款BMW i3-REX车辆结构
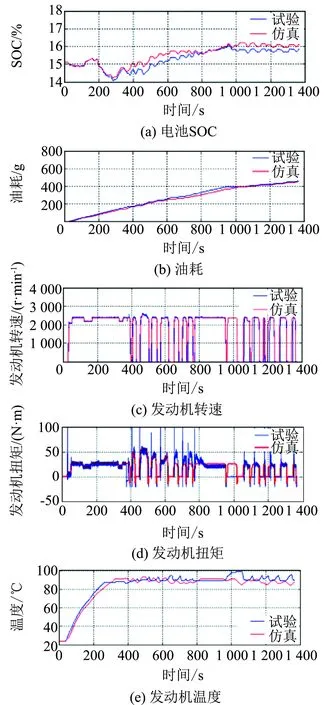
图22 CS模式,温度22 ℃,UDDS循环下试验和仿真对比结果
5 结论
本文基于APRF试验数据,利用Autonomie开发了BMW i3-REX车辆仿真模型。首先,将试验数据导入Autonomie。其次,在不同热工况下,利用导入的试验数据分析各分部件性能。此外,在正常温度、高温度和低温度工况下分析车辆级控制。基于分析,开发了包含热因素的车辆级控制器。车辆级控制器主要包括两部分:
(1)模式控制:CD/CS模式和发动机起动/停机。根据电池SOC,车辆模型从CD模式转换为CS模式。当车辆在CS模式下,发动机起动/停机状态或EV/HEV模式由车速和热工况决定。
(2)发动机运行目标,由于车辆为串联HEV,只能决定发动机运行目标,即转速和扭矩。根据电池SOC状态和热状态,确定发动机运行目标。
最终结合部件和车辆级控制器模型,建立了包含热状态影响的车辆仿真模型。结果是车辆仿真模型能够预估车辆运行、油耗和电池SOC,与试验之间的差异在大多数实例中小于5%,处于多次试验差异范围内。开发的车辆仿真模型不仅能够评价车辆性能,而且能够评价热状态的影响。