智能网球收球机器人系统
2019-04-22吴伟键曾毅杰冯贵斌*
吴伟键 曾毅杰 冯贵斌*

【摘 要】文章介绍了一种基于机器视觉的智能捡球机器人,包含机械结构、视觉模块、无线模块、避障系统、叶轮系统等硬件设备。实现了可以完全自主收集大范围区域内的比赛型网球,且具有自动和手动两种控制模式,用户可以连接手机APP实现对车体的完全控制。具有收集速度快,成功率高,连续工作时间长,故障率低等特点。通过实物样品的性能测试表明,该捡球机器人能达到预期捡球效果,具有推广意义。
【关键词】捡球机器人;颜色识别;机器视觉
中图分类号: TP391.41;G845 文献标识码: A 文章编号: 2095-2457(2019)05-0090-002
0 引言
据谷歌网站近三年来全球热搜榜的数据显示,罗杰·费德勒和拉法·纳达尔的强势回归推动了网球搜索量的增加,网球运动的重要地位已逐渐向足球和篮球的球类主导体育地位靠拢。而且,智能车、机械臂、计算机视觉等机器人领域随着3D打印机的普及使用取得了极大的发展。此项目的理念,正是基于这两者的共同发展而衍生出来的。我们结合技术与设计,打造一款省时省力,智能化,效率化的场地服务型机器人,体现了新时代高效运动的创新和要求。是一款为用户贴心打造的具有商业价值的智能产品。
1 系统硬件设计
1.1 总体方案
图1为本项目初始设计图。该机器人由前后两部分组成,主体为识别系统和收球系统,后部分为集球箱,一次大约能收集50~60个网球。最前端是扩大收球面积的仿生设计锹角挡板,顶部是图像采集部分OPENMV摄像头连接ESP32主控板传输识别到的球的圆心坐标和中心差值,单片机用PID函数定义速度与差值处理后输出两个PWM波形连接L298N驱动板的两个使能端,给左右驱动轮使能。静止的网球在车向前行的情况下首先触碰高速旋转的叶轮,叶轮通过同步带呈环形内外连接同步轮达到内旋效果,产生足够的力和向后的惯性使球上升约20厘米的高度落入后筐。此过程中,触碰斜板上安装的行程开关,使单片机上计数器加一,然后继续寻找下一个目标。假如视野中没有目标,则规定在车一定区域内旋转。遇到障碍时,车前设置的双边超声波模块计算左右距离的不同进行相应的避障行为。另外,手动操作时用连接单片机的蓝牙模块和Android平台连接,通过自主设计的APP操作关闭自动寻球和对两轮的控制。
1.2 工作步骤
1.2.1 车轮驱动
在这个部分选用了集成方案—科沃斯扫地机器人系列的散装驱动轮,它具有安装快速、兼容性高、操控简易等优点,驱动轮使用的是12V带码盘减速电机與50mm直径防滑胶轮组合,内置光电对管和栅格测速码盘,?电机转一圈,码盘输出20个脉冲,用单片机处理后可以精确控制小车的行驶距离和转弯角度。
1.2.2 车轮调速
车体前进转弯行驶的一大重要部分就是调节双边车轮的速度。L298N是一款业界常用的双H桥电机驱动芯片,其中每个桥可以提供2安的电流,功率部分的供电电压范围是2.5-48V,逻辑部分5V供电,接受5V的TTL电平,L298N的使能端连接控制板的PWM输出口,调节两边PWM数值就可以实现直行、后退、差速转弯等功能,手动模式下PWM数值默认为100。
1.2.3 叶轮回收
这个部分由电机、左叶轮,右叶轮,轴承,同步带,同步轮,丝杆组成。左右叶轮呈相反方向旋转,轮毂在装备柔性材料用于与球的压力接触。叶轮回收的初始设计是用736直流电机牵拉两个叶轮正负时针旋转,配以16khz的大功率场效应管10A调速模块的配合使用为方案。电机空载旋转的工作电流为500~1000mA,带负载后电流会急剧增大,速度降低,长时间连续工作可能会导致过热烧穿,场效应管是正温度系数,随温度升高电流会有一定的下降,且内部还会寄生出一个二极管,所以常用在感性负载中。而后备方案选用了12V600转的直流减速电机,可连续24小时带负载左右,有效解决了电流大易发热的难题。
1.2.4 超声波避障
超声波避障, 是移动机器人中, 原理比较简单, 容易实现的一个功能。本次使用HC-SR04收发一体的紧凑型超声,广角更好,但聚焦能力偏弱。有效检测距离大约为2米,此模块应安装在车体顶端,由四个模块组成的避障系统。在完成超声的驱动程序的编写之后,设定超声收发的频率,每次收到之后,如果有一个通道为“阳性”,则启动避障逻辑。
2 系统软件设计
2.1 颜色识别
硬件使用OPENMV3 CamM7,使用RGB565图像格式时,可达到20帧以上速率,使用MicroPython语言编写程序,其中使用img模块中find_blob函数进行颜色阈值查找,设定好正常光线下绿色网球的颜色阈值,取景框内有此阈值内的目标则标注白色矩形框,并在后台打印出矩形框中点与画面中点的差值供给PID函数。
2.2 优先寻捡
为防止程序进入死循环,加入了取最大目标值的函数。当视野内有两个以上的目标时,同时计算所有目标矩形框的面积,面积最大的一个即最为接近的一个目标。
2.3 蓝牙控制
小车控制模块使用了乐鑫公司的ESP32-WROOM模组,这是一款蓝牙&WIFI一体的芯片。ESP32 可作为独立系统运行应用程序或是主机 MCU 的从设备,通过 SPI / SDIO 或 I2C / UART 接口提供 Wi-Fi 和蓝牙功能。使用CP2102芯片进行TTL串口烧写固件。其中常用固件有Arduino,MicroPython,LUA,由于MicroPython中蓝牙库未更新,所以本次使用了Arduino作为平台,使用前需要先设置UUID,然后通过UART接收的字符判断前进的方向。
3 调试安装
在设计、组装和运行过程中,有着硬件与软件上的计算偏差。硬件偏差表现为:PLA打印件设计过程中通常需要0.2mm作为组装增量,且容易导致热变形;而驱动轮直径如果小于从动轮,则有可能发生三角稳定关系导致其中一个驱动失效,所以最好使用履带驱动轮。软件偏差上,PID参数需要经过多次调整才能正常使用,一般情况下可以不使用微分参数,P数值调大可以增加机体对目标的反应程度,过大可能会导致剧烈抖动;由于摄像头使用的是广角镜头,在寻找目标时会受到球上方景象的多个物体干扰,为减少干扰,调试过程将取景画面垂直方向的三分之一裁剪,取得了良好效果。
4 小结
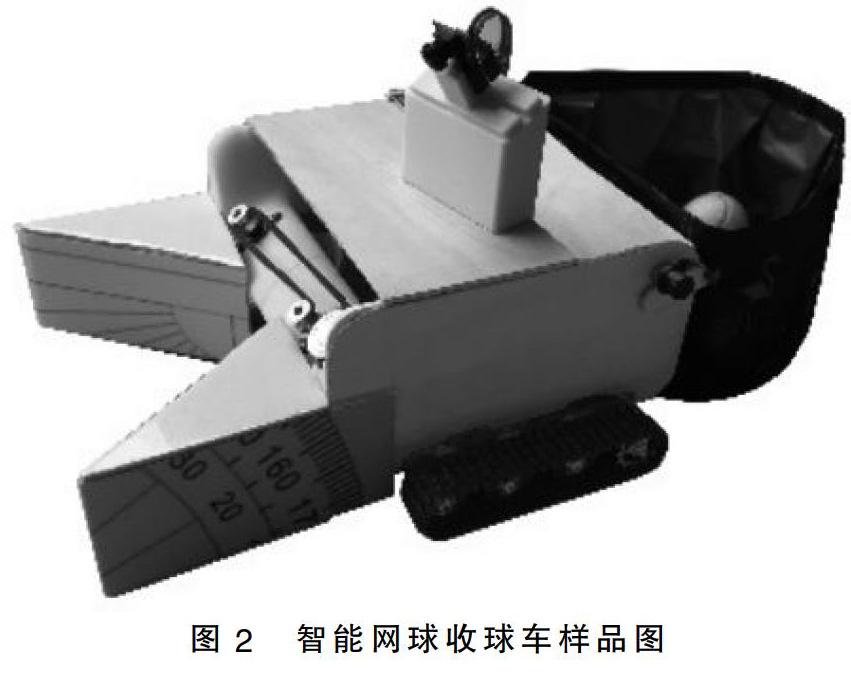
在上述理论的指导下,本项目最终形成实物,如图2所示。作品体现了对现有技术的改进,使用了较为新型的软硬件方案,系统运行高效稳定,具有可持续发展性。智能机器人是一个充满机遇和挑战的领域,未来我们将不断创新,精益求精,力求为科技进步和发展作出贡献。
【参考文献】
[1]陈吕洲.Arduino程序设计基础(第2版)[M].北京航空航天大学出版社:北京,2015:75-88.
[2]赵罘,杨晓晋,赵楠.SolidWorks 2018中文版机械设计从入门到精通[M].人民邮电出版社:北京,2018:98-145.
[3]邵子扬.MicroPython入门指南[M].电子工业出版社:北京,2018:20-63.
[4]申华,刘龙.嵌入式Linux系统软硬件开发与应用[M].北京航空航天大学出版社:北京,2013:238-303.
[5]廖建尚,郑建红,杜恒.基于STM32嵌入式接口与传感器应用开发[M].电子工业出版社:北京,2018:147-188.
