基于图像识别的XY轴模组运动控制
2019-04-22齐美星张志强王云凯段舒馨
齐美星 张志强 王云凯 段舒馨
【摘 要】随着中国产业经济结构的转型升级和发展,基于机器视觉的伺服运动控制在智能制造类自动化设备上应用也越来越广泛。本文采用改进的模板匹配算法,建立并遍历系统的标准字符或图形模板库,计算两幅图像对应像素点的欧氏距离并归一化进行相似度判别,从而识别出目标图形的外形轮廓,驱动运动机构重绘该轮廓图形的轨迹。实际测试结果显示该算法对目标匹配识别准确性高,运动轨迹重绘也准确。
【关键词】图像识别;目标匹配;XY模组;定位控制
中图分类号:TP391 文献标识码: A 文章编号: 2095-2457(2019)05-0072-002
0 引言
随着“中国制造2025”战略的推进和产业经济结构转型升级,加工制造类企业在人力成本管理、产品性能和质量提高和快速定制制造等方面有了明显改善,人们已经认识到把先进智能处理技术应用到制造行业是时代发展趋势,涌现出许多无人自动化生产车间或智能制造车间。因此对制造零部件进行品质分类识别、目标匹配定位、机械手移载作业等都是智能机器设备代替人的典型工序流程。基于机器视觉的伺服运动控制在智能制造类自动化设备上应用也越来越广泛,尤其是自动化生产线、工业机器人应用、智能仓储物流系统、智能监控和安保机器人等行业和应用领域,具有很好的发展和应用前景。
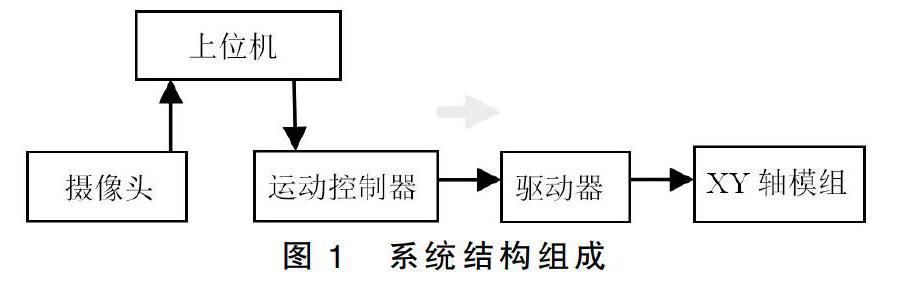
1 系统总体结构
本系统由上位机、相机、运动控制单元等组成,运动控制系统采用PLC和驱动器的控制结构,通过旋转编码器检测滑台位置及速度,从而构成闭环控制系统。选用西门子公司的S7-1200系列CPU1214DC/DC/DC PLC作为控制器,本机有8 DI和6DO,为晶体管输出类型,可实现4路单相100KHZ的高速计数输入、支持最多4路高速脉冲输出。驱动器采用DM542,额定电压为18~50VDC,脉冲响应频率可达200KHZ,具有128细分设定且不影响其输出力矩,同时具有过压、欠压、过流、短路和过热等保护及报警功能。上位机与摄像头通过USB口连接,与PLC通过以太网实现通信,上位机软件采用VS2015平台开发。系统主要实现功能,先固定拍摄某个图像,利用图像识别算法识别出其轮廓形状,然后驱动运动机构上的画笔重绘该轮廓图形的轨迹。
2 图形目标识别算法
图像识别技术作为人工智能的一个重要分支,是指对图像进行处理、分析和理解,以識别各种不同模式的目标和对象的技术。主要涉及图像滤波、图像增强、边缘检测和模板匹配学习等算子。
首先采集图像,进行彩色图形灰度化处理,为了改善与噪声有关的后续边缘检测的性能,采用高斯滤波算法进行图像滤波处理;接下来通过计算图形梯度的幅值来完成边缘增强,然后利用Sobel算子在边缘检测算子扩大其模板,在边缘检测的同时尽量削弱了噪声。其模板大小为3×3,其将方向差分运算与局部加权平均相结合来提取边缘。最后通过模板匹配算法完成即可进行实际的图形识别。
图像中的每个像素点和以上水平和垂直两个卷积算子做卷积运算后,再计算得到梯度幅值 G(x,y),然后选取适当的阈值τ,若G(x,y)>τ,则(i,j)为边缘点,否则,判断(i,j)为非边缘点。由此得到一个二值图像 {g(i,j)},即边缘图像。
Sobel算子在空间上比较容易实现,不但产生较好的边缘检测效果,同时由于其引入了局部平均,使其受噪声的影响也较小。若使用较大的邻域,抗噪性会更好,但也增加了计算量,并且得到的边缘比较粗[1-2]。
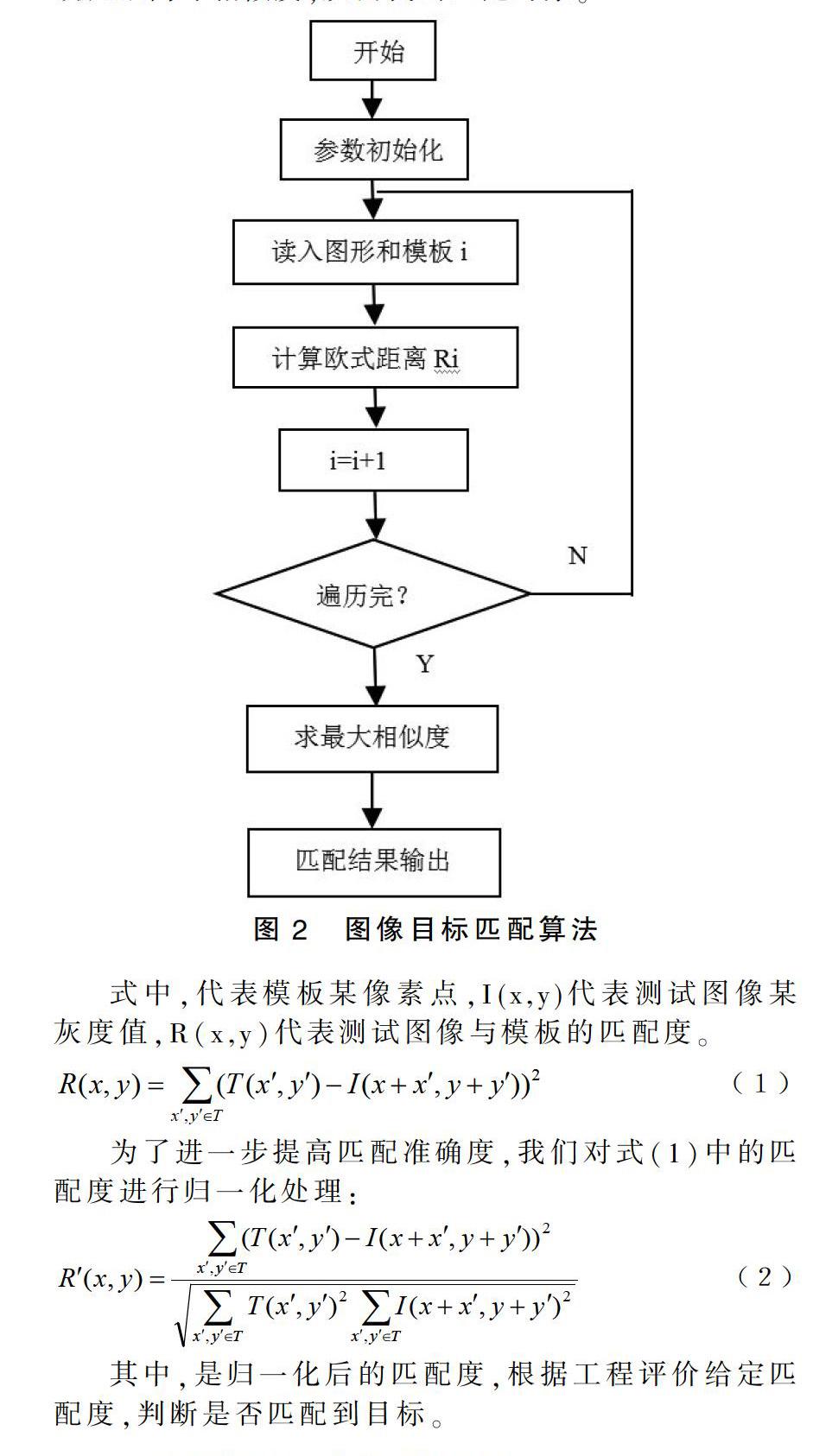
采用改进的模板匹配算法。即计算两幅图像对应像素点的欧氏距离进行相似度判别方式。欧氏距离越小,相似度越高,以此为依据,搜索得到匹配对象。该方法的大致流程如下:首先对刚提取出来的图形字符进行归一化预处理,得到与标准字符一致的规格。然后,建立系统的标准字符模板库,对模板库中字符进行有规律的命名。最后,遍历模板库计算待识字符图像与标准字符的欧氏距离即相似度,从而找出匹配对象。
式中,代表模板某像素点,I(x,y)代表测试图像某灰度值,R(x,y)代表测试图像与模板的匹配度。
为了进一步提高匹配准确度,我们对式(1)中的匹配度进行归一化处理:
其中,是归一化后的匹配度,根据工程评价给定匹配度,判断是否匹配到目标。
3 XY轴模组运动控制实现
滑台模组作为一种提供直线运动的机构,可以卧式、立式或按特定方式组合应用。按传动机构可分为齿轮型、同步带型、滚珠丝杆型和直线电机驱动型,其中由步进或伺服电机驱动的伺服滑台作为运动控制类高档精密部件,具有定位精度高、速度快、行程大、低速运行平稳、噪声低等特点[3-4]。目前对于滑台的驱动控制结构一般有以下几种方式:(1)采用PLC+驱动器。一般经济型和小型PLC都有数个高速脉冲输出和高速计数器功能,该方式多用于轴数少的控制系统,编程应用方便。(2)采用PC机+运动控制模块+驱动器。主要用于轴数较多或者工艺要求比较复杂,利用PC机的强大运算处理功能可以设计复杂的控制算法及友好的人机界面。(3)直接采用微处理器+驱动接口板+伺服电机。该方式成本低,但系统设计开发周期较长,对维护人员要求很高。
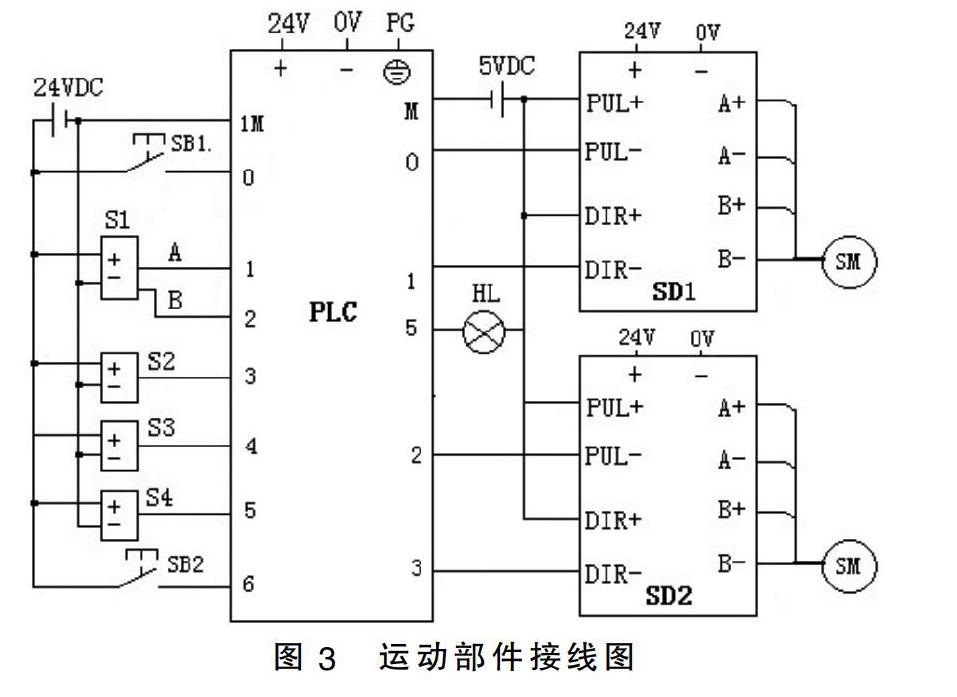
我们以双轴滑台模组叠加构成XY直角坐标,PLC作为控制器,设计了一种能够实现机构自动快速搜索原点、定位、曲线插补等运动控制。如图3所示,SD1和SD2分别表示步进电机驱动器,控制脉冲和方向信号由PLC发出,S2、S3和S4分别表示左、右限位和原点接近开关。
4 结论
针对本设计,我们以数字、常见字符和简易图形为测试目标,通过数十次的实际的系统测试,结果都能准确地对目标的进行识别,这也验证了文中图形识别算法的有效性,且设计的运动机构能够正确地进行定位、曲线插补等以及重绘该轮廓图形的轨迹。该设计的方案和算法在现代自动化生产线、激光切割和焊接、智能仓储物流系统、智能监控等行业和应用领域,具有很好的发展和应用前景。
【参考文献】
[1]胡明星.模板匹配优化耦合图像校正的旋转工件目标定位算法[J].组合机床与自动化加工技术,2016,21(21):283-287.
[2]田明锐.结合聚类参数的圆投影模板匹配改进算法[J]. 计算机工程与应用,2015,16(4):181-185.
[3]胡玉春.机械手原理[M].北京:中央广播电视大学出版社2011.
[4]李银露.贴片机伺服运动控制系统的设计与实现[J].电子设计工程.2018.26(19):147-149.
