基于模糊控制的轮式移动机器人避障研究
2019-04-22彭缓缓郭毅锋黄丽敏刘海涵
彭缓缓 郭毅锋 黄丽敏 刘海涵
【摘 要】针对现实生活中未知时变的周围环境,文章提出了一种基于模糊控制的轮式移动机器人在多个不同性质的障碍物中智能避障的模糊控制方法。通过MATLAB/Simulink仿真软件搭建了轮式移动机器人运动学模型,以机器人所安装的环境感知多传感器所提供的障碍物距离数值以及作为机器人修正姿态参量的实时速度误差值作为研究参数,对模糊控制器进行了分析研究,其仿真及实测结果表明,文章所设计的模糊控制器可行、有效。
【关键词】轮式移动机器人;模糊控制;避障
中图分类号:TP242 文献标识码: A 文章编号: 2095-2457(2019)05-0059-002
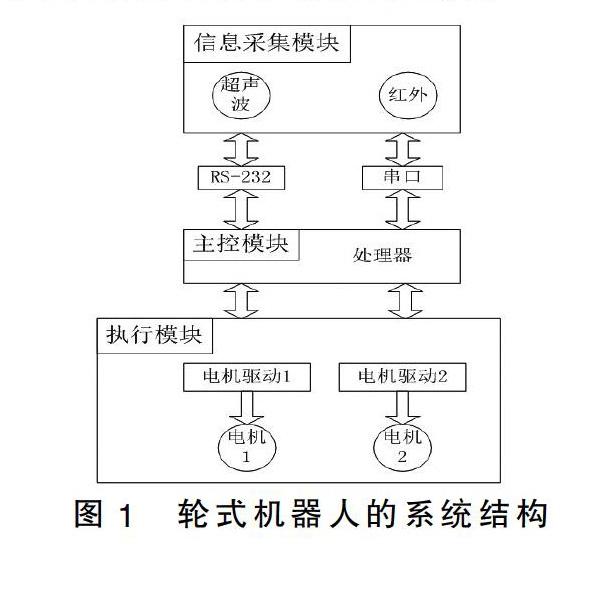
1 轮式机器人的系统结构
轮式移动机器人的执行单元是由底盘前下方的万向轮和底盘后下方的两个采用差速转向式的驱动轮构成,控制系统的设计如图1所示。控制结构采用模块化结构,主要有由多个不同种類型号的传感器完成机器人所处的周围环境数据的采集、以STM32F407为核心来实现机器人系统的运行控制以及完成机器人的直线和转向等运行姿态的驱动机构组成。
2 模糊控制避障的实现
2.1 模糊避障系统设计
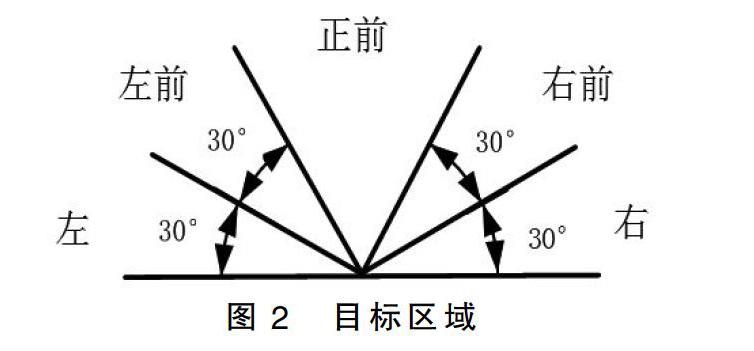
由于机器人避障的决策与其所处环境中杂物的分布有关联,又为了让机器人更准确的理解周围环境,对机器人的正前方180°的目标区域划分为左、左前、前、右前、右,如图2所示,模拟机器人机体本身的多传感器的分布情况,用来实时判断阻碍物体的相对于机体的坐标。
运用模糊逻辑信息融合算法,把机器人所处环境中的多阻碍物体进行了区域划分,根据阻碍物的距离数值的不同来设计机器人的运行轨迹,并由控制规则发出执行命令从而实现机器人的位置调整,最后把机器人的姿态位置差量实时反馈给控制器[2],从而实现了避障功能,轮式机器人避障的模糊逻辑结构如图3所示。
2.2 避障仿真实现
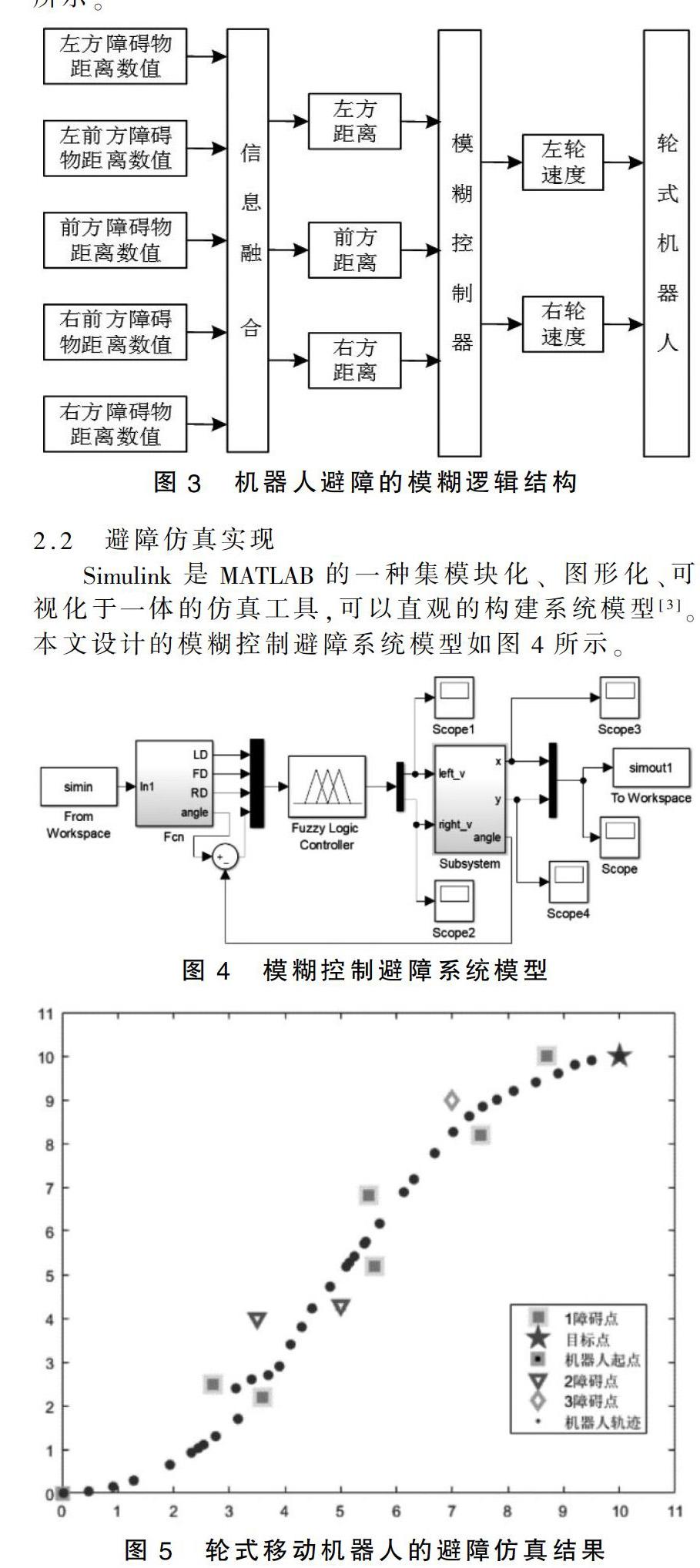
Simulink是MATLAB的一种集模块化、图形化、可视化于一体的仿真工具,可以直观的构建系统模型[3]。本文设计的模糊控制避障系统模型如图4所示。
以坐标原点(0,0)为初始位置,以(10,10)为终点位置,并在此时环境中随机的安置多个阻碍物体,把这些信息写入MATLAB的m文件里。传感器采集的阻碍物到机器人中心的距离数值LD、FD、RD为模糊控制器的输入,经过模糊推理输出的是机器人左、右轮的实时速度。把机器人的运动学理论与机器人所处的实际环境结合起来,通过不断调整各个模块参数,进行多次仿真试验,最后把仿真数据整理后执行画图命令,即得到如图5所示的轮式移动机器人的避障仿真结果。从图中可以看出,当机器人遇到阻碍前行的物体时,其能够灵活的转变一定的角度来避开阻碍物并到达指定的目标地点处。
3 机器人样机测试
对轮式移动机器人进行实物避障实验测试,如图6所示。在机器人的右前方(由里指向外)依次摆放两个障碍物,第一个障碍物位于机器人正前方的位置,由于障碍物的右侧是一面墙壁,所以此时的机器人就微微的缓慢的向左偏移一定的角度来避开第一个障碍物;当移动到两个障碍物之间时,由于机器人此时所处在两个障碍物中间偏左一点,而机器人的右边是一面墙,所以此时机器人依然要向左稍微偏移一定的角度,最终越过两个障碍物达到指定的目标位置而停止移动。
4 结论
从轮式机器人实物图的避障结果可以看出,在存在多个不同材质形状障碍物的情况下,移动机器人能够灵活微调自身姿态避开阻碍前行的物体前进,并最终到达给定终点位置。实验结果表明,文章所设计的避障模糊控制器可行、有效,且具有相当的精确性,达到了预期设计目的。
【参考文献】
[1]杨小菊,张伟,高宏伟,米海山.基于模糊控制的移动机器人避障研究[J].传感器与微系统,2017,36(03):51-54.
[2]Abiyev R H , Günsel, Irfan S, Akkaya N , et al. Fuzzy control of omnidirectional robot[J]. Procedia Computer Science, 2017, 120:608-616.
[3]苏衍保.基于多传感器信息融合的迎宾机器人避障问题研究[D].山东科技大学,2017.
