舰载机人工进场着舰精确轨迹控制技术
2019-04-22段卓毅王伟耿建中何大全马坤
段卓毅,王伟,耿建中,何大全,马坤
航空工业第一飞机设计研究院,西安 710089
航母舰队可有效地执行以远距离夺取局部海域制空权、制海权为目标的对地/海打击、反潜作战、远程预警、作战指挥等任务[1-4],是衡量国家综合实力的象征。舰载机可以在以航母为中心的1 000 海里(1海里=1.852 km)范围内执行作战任务,具有更好的使用灵活性和更强的对海/对空协同作战能力,是航母舰队执行空中打击、指挥、预警等任务的主体之一。中型航空母舰上的甲板总长仅300 m左右,起落段为100~200 m,只有路基跑道的1/10[5],尽可能地降低触舰速度及触舰载荷是舰载机发展的关键技术之一。在低速状态下,舰载机的操纵性、稳定性和飞行品质等将受到显著地削弱,迫切需要引入进场着舰精确轨迹控制技术,以减轻飞行员操纵负担,提高着舰成功率。
1911年1月18日,美国飞行员Eugene Ely驾驶一架螺旋桨飞机在“宾夕法尼亚”号巡洋舰上完成了人类历史上的首次着舰[6]。最初装备在航母上的舰载机是螺旋桨飞机,由于它的质量轻、体积小、飞行速度很低,在航母上降落时飞行员有足够的反应时间,故最早期的舰载机采用陆基飞机相同的着陆方式,辅以早期的阻拦装置制动就可以满足着舰要求[7]。从20世纪初到第二次世界大战期间,舰载机着舰引导工作是由站在飞行甲板末端左侧的着舰信号官(Landing Signal Officer,LSO)通过手持旗板打信号来指挥舰载机进舰与着舰[8-10]。第二次世界大战后,随着航空科学技术的发展,舰载机翼载荷逐渐增大,其着舰时的飞行速度也越来越高,“示牌进场”方式引导着舰的有效性已经大大下降。1952年英国首先提出在航母上使用斜角甲板的设计思想[1],实现了起飞和着舰的同时作业,增加了着舰区的纵向距离,扩大了着舰范围,同时也使舰载机具备了逃逸复飞能力,大大提高了舰载机的出动率及生存率。此时,在舰载机进舰过程中,开始采用了等角下滑着舰技术[11]。为了更好地实现等角下滑,进场动力补偿技术被引入到舰载机着舰控制中,以减轻飞行员操纵负担[12]。同时期,光学助降系统也逐渐被使用到航母上,确保舰载机沿着基准引导光束下滑着舰,进而指引等角下滑[13]。在20世纪70年代,美国海军开发了以自动着舰为主的全天候着舰引导系统(All Whether Carrier Landing System, AWCLS),为舰载机的精确进场着舰轨迹控制提供了有力保障[14-17]。AWCLS有3种工作模态:全自动模态、联合半自动模态和舰面控制进场模态。
本文总结分析了舰载机人工着舰控制技术的发展历程,首先,对进场着舰精确轨迹控制的应用需求进行讨论,指出其必要性和直观的有益效果;随后,讨论了舰载机进场着舰精确轨迹控制的演变过程、发展趋势及涉及的关键技术;最后,讨论了舰载机进场着舰精确轨迹控制对飞机设计和减轻驾驶员负担的有益效果。
1 舰载机进场着舰概况及精确轨迹控制应用需求
1.1 舰载机进场着舰轨迹
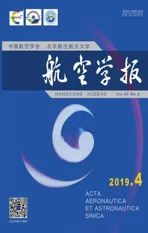
天气状况良好,航空母舰周围没有云,且能见度超过5 km以上时,飞行员运用目视方式进场及人工着舰。采用目视方式进行着舰的着舰机在航空母舰上空按长方形航线进行左回旋飞行,如图1[11]所示,此时的航空母舰位于长方形右边线的中心PL1。
类似地,将上边线中心命名为PL2,左边线中心命名为PL3,下边线中心命名为PL4。如果需要保持着舰待命状态,在不降低高度的情况下按这一长方形航线进行回旋飞行,每通过一次航空母舰上空PL1时与进场操作员取得联系,确认是否下达了着舰许可指示。
一旦下达了着舰许可,舰载机通过PL4点后,向航空母舰前进方向飞行,进入着舰航线,此时的飞行高度约为240 m,飞行速度在154~180 m/s 之间,如图2[11]所示,图中V为飞行速度,H为飞行高度,IC为着舰区中心线,IM为中心线延长线,AR为着舰区边界到着舰区中心线的距离,FLOCS为下滑道。过航空母舰上空或右舷时放下尾钩,发动机油门采用85%~89%军用推力继续沿直线飞行一段距离后,打开减速板,表示要着舰。高度下降到180 m时作180°左转弯后,逆着航空母舰前进方向沿左舷作水平飞行。在这段飞行中,飞行员检查飞机重量,要确认飞机重量小于最大着舰重量,飞机在航空母舰侧旁上空飞行约 1 852 m后再次作180°转弯,飞抵着舰区中心线延长线的后方,进入下滑道,飞机的飞行高度为116 m,飞行速度为64~66.7 m/s,离舰约1 389 m,着舰指挥官操作菲涅耳透镜光学着舰系统的信号切换灯亮,使飞行员确认飞机进入下滑道,于是飞机便可遵循该系统的引导沿下滑道着舰,此时飞机将保持一定速度以及一定迎角飞行。
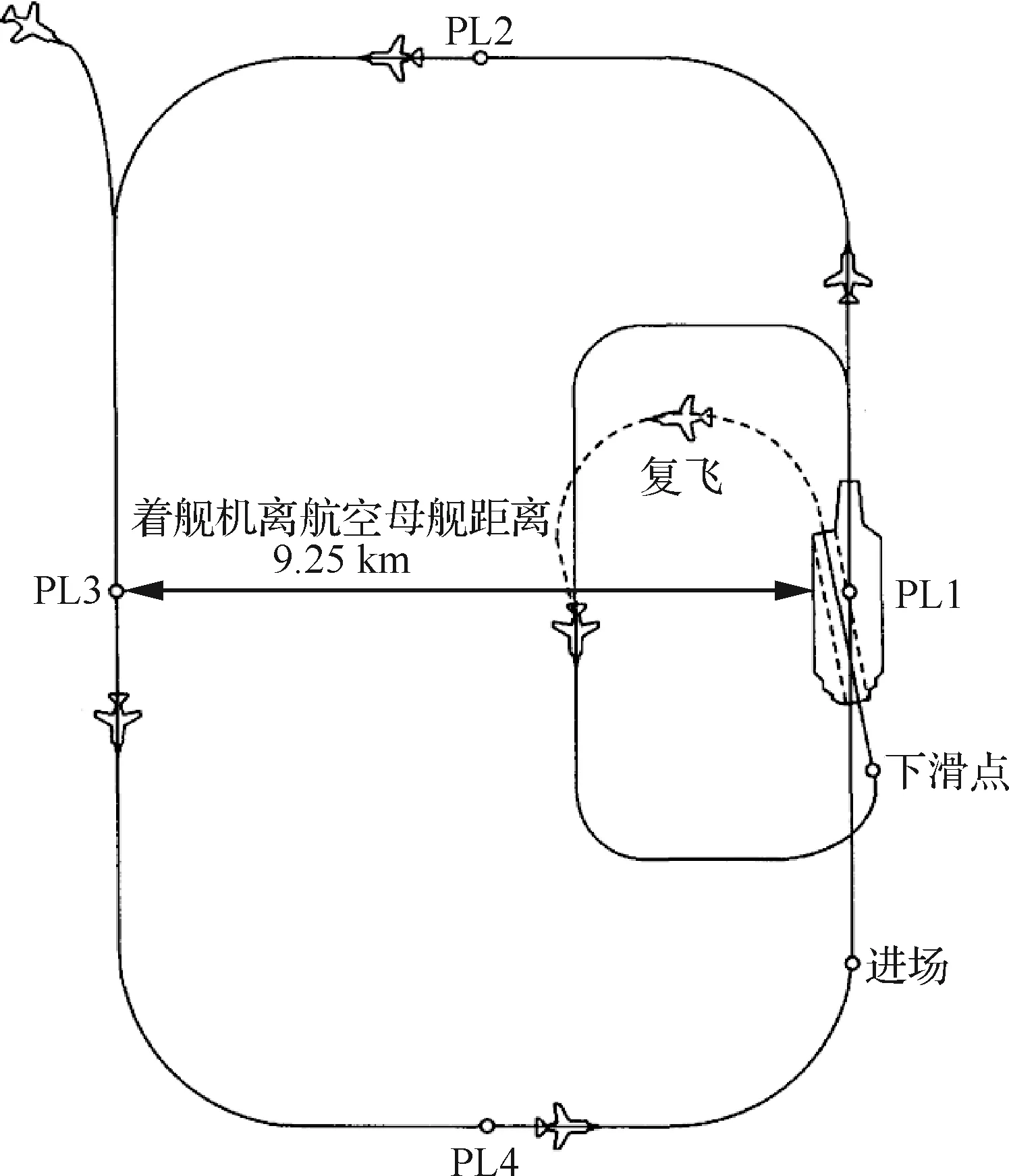
图1 舰载机目视进场示意图[11]Fig.1 Sketch of visual approach for carrier-based aircraft landing[11]

图2 舰载机目视着舰航线[11]Fig.2 Flight path of carrier-based aircraft visual landing[11]
1.2 舰载机进场着舰精确轨迹控制应用需求
舰载机在航空母舰上的着舰经常被形容成在针尖上跳舞或者是受控制的高速坠落,其降落程序和一般降落陆基机场着陆完全不同;降落在陆基机场是以拉飘的形式慢速降落,可是降落在航母甲板上却是在海上晃动的环境下,以高速度降落在横向只有几十公尺宽,纵向仅有4道拦阻钩的着舰区,着舰困难度非常高、着舰过程中飞行员操纵工作量特别大。例如,操纵F/A-18“超级大黄蜂”的飞行员,在实施“着舰”的最后18 s内,需要对航线、迎角和速度进行数十次微小的调整,以确保战机尾钩能准确钩住拦阻索,工作量大、难度高、风险高。使得许多海军战机在完成令人疲劳的作战任务后,还要打起精神完成如此困难的着舰,经常就会发生事故。
美国海军研究表明,在着舰训练费用方面,现阶段美国海军每年的舰载机着舰训练费用超过10亿美元[16],并且浪费了许多飞行时间及舰载机宝贵且有限的寿命。因此如何使舰载机着舰更为容易,一直都是拥有航母的国家海军在思考的主要问题之一。
通过对舰载机进场着舰轨迹进行精确控制,可以降低着舰难度,并使飞行员的着舰安全更有保障,把宝贵的训练时间更多地用在学习战斗技能上;减小机体结构所受到的冲击载荷,增加舰载飞机的使用寿命,增加可用战机数量并降低了维修费用;大大减少着舰脱钩数量,使战机空中加油次数降低,降低对舰上空中加油机的数量需求;无需为战机降落创造条件而过多牺牲航母的机动性,并且可以缩减运营成本等等。
可见,无论是从降低着舰风险、减少着舰训练花费,还是保证航母机动性等方面;对舰载机进场着舰轨迹进行精确控制,都将取得非常直观的收益。
2 舰载机进场着舰引导与控制系统
2.1 着舰引导技术
舰载机着舰系统从最初的人工着舰方式,先后发展了镜面光学助降系统(Mirror Optical Landing System, MOLS)、菲涅尔透镜光学助降系统(Fresnel Lens Optical Landing System, FLOLS)、全天候电子助降系统(雷达引导系统)和导航卫星助降系统;从早期的着舰信号官(图3)发展到现代的着舰信号官(图4),引入了菲涅尔光学助降装置(图5[13])和精密跟踪测量雷达(图6[6]),有效地改进了着舰引导精度。美国海军一直在开展航母机舰适配性试验,并开发未来着舰系统,包括改进菲涅尔透镜着陆系统(Improved Fresnel Lens Optical Landing System, IFLOLS)、远距离布阵系统(Long-Range Lineup System,LRLS)和“艾科尔斯”改进型光学助降系统(Improved Carrier Optical Landing System, ICOLS)等[6]。

图3 早期着舰信号官Fig.3 Early landing signal officer

图4 现代着舰信号官Fig.4 Modern landing signal officer

图5 菲涅尔光学助降装置[13]Fig.5 Fresnel lens optical landing system[13]

图6 舰载精密跟踪测量雷达[6]Fig.6 Shipboard precise tracking and measuring radar[6]
早期人工着舰主要依赖于经过严格着舰训练的飞行员在着舰信号官的协助下实现着舰,事故率比陆基飞机约高3~6倍,而着舰失败率又占总失误率的85%,其中黑夜又比白天大2倍;而现代作战多在夜间行动,时段限制和不利气象往往是作战的最佳时机。
2.2 等角下滑着舰轨迹控制及动力补偿技术
1) 等角下滑着舰轨迹控制技术
随着舰载机着舰速度的增加,为了提高其出动率和生存率,等角下滑着舰技术被引入到舰载机着舰过程中[7]。所谓等角下滑技术,是指在舰载机截获合适的下滑道后,一直保持下滑航迹角不变,同时保持俯仰角、速度和下沉率不变,直至舰载机与甲板啮合为止,实现撞击式着舰,如图7[16]所示。
图7 等角下滑着舰[16]Fig.7 Equiangular glide carrier landing[16]
为了更好地实现等角下滑,在天气条件较好时,舰载机飞行员可以根据菲涅尔镜提供的引导信息及时修正航迹高度实现安全着舰;在天气条件较差时,根据着舰信号官的通信指挥,保证舰载机始终在合理的下滑道上。
另外,舰载机在着舰时必须以较大的迎角飞行,以确保飞机保持合适的下沉率及下滑角。但是如果飞机迎角超过了最大升阻比点所对应的临界迎角,则飞机将进入速度不稳定区,使得保持飞行轨迹变得十分困难。为了保证飞机的着舰姿态,此时飞行员将同时操纵飞机驾驶杆及油门杆,辅助以方向舵的配合对准跑道,使得飞行员在进场着舰时工作负担较大,对着舰准确及着舰安全存在较大隐患。
2) 通过进场动力补偿实现等角下滑控制
从20世纪60年代初开始,为了减轻飞行员操纵负担,更好地实现等角下滑,美国海军在自动着舰系统中开始引入进场动力补偿系统(Approach Power Compensator System, APCS),如图8[18]所示,对发动机推力进行控制,以保持飞机低速稳定性,提高航迹控制精度,更好地保证舰载机等角下滑着舰控制过程[18-20]。使用等角下滑技术的好处在于舰载机在和航母甲板啮合前最关键的20 s内,通过安装在舰载机上的APCS来自动调节,以调整舰载机的俯仰角、空速、迎角和轨迹角,改善甚至消除舰载机的速度不稳定现象,较好地提高下滑航迹精度。
进场动力补偿系统主要用来自动调节舰载机进场时的速度和高度,它的功能是通过自动调节油门,来控制飞机进场速度以保持其恒定值,它已经成为航母/舰载机系统成败的一项关键技术。目前的进场动力补偿系统已发展到通过控制油门来保持舰载机着舰过程中迎角恒定。在动力补偿系统的帮助下,飞行员只需专注于保持现有的飞行状态,同时修正由于风和航母运动等扰动造成的航迹偏差,最终在预定的着舰啮合点,实现安全着舰。等角下滑着舰方式有利于减轻飞行员的负担,减小进舰与着舰过程中的人为误差,被认为是着舰技术的一次革命性进步,自出现之后一直使用至今天[21-24]。
图8 进场动力补偿系统[18]Fig.8 Approach power compensator system[18]
进场动力补偿的目的是一方面实现速度的稳定,另一方面实现轨迹的跟踪控制。从控制原理上可分为基于速度恒定的自动油门控制和基于迎角恒定的自动油门控制两种设计方案。基于速度恒定的自动油门控制以飞机速度为主反馈,自动动力补偿算法采用“比例+积分”的形式,实现系统的无静差控制,同时引入纵向过载nx、迎角α、法向过载ny及俯仰角θ等信息,保证速度调节过程平滑、稳定,如图9[25]所示(图中K1、K2、K3表示控制增益,ΔV为速度误差)。
基于速度恒定的进场动力补偿,由于速度反馈轨迹跟踪响应时间比较长,对于纵杆指令迎角的飞机,速度恒定的进场动力补偿控制不能精确跟踪俯仰姿态角轨迹(存在跟踪静差);对于纵杆指令俯仰角速率的飞机,该种自动油门控制方式会取得很好的轨迹跟踪性能[11]。
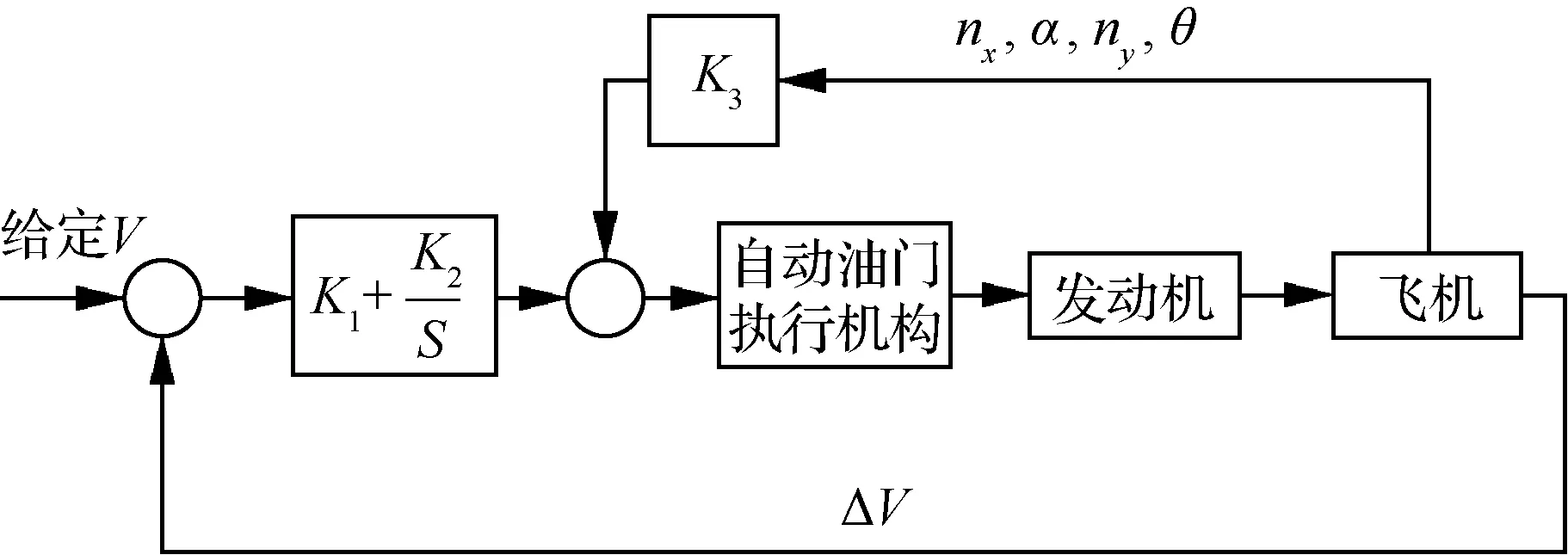
图9 基于速度恒定的进场动力补偿[25]Fig.9 Approach power compensator system based on velocity constant control method[25]
基于迎角恒定的进场动力补偿以飞机迎角为主反馈,补偿算法同样采用“比例+积分”的形式,实现系统的无静差控制,同时引入纵向过载、法向过载、平尾作动量δz及俯仰角等信息,使系统具有较好的动态响应过程,如图10[25]所示(图中Δα为迎角误差)。由于舰载机的钩眼距是一个定值,如果能够实现精确控制迎角,只要飞行员操纵飞机进入理想下滑线后启动自动油门控制,可显著提高着舰的成功率。
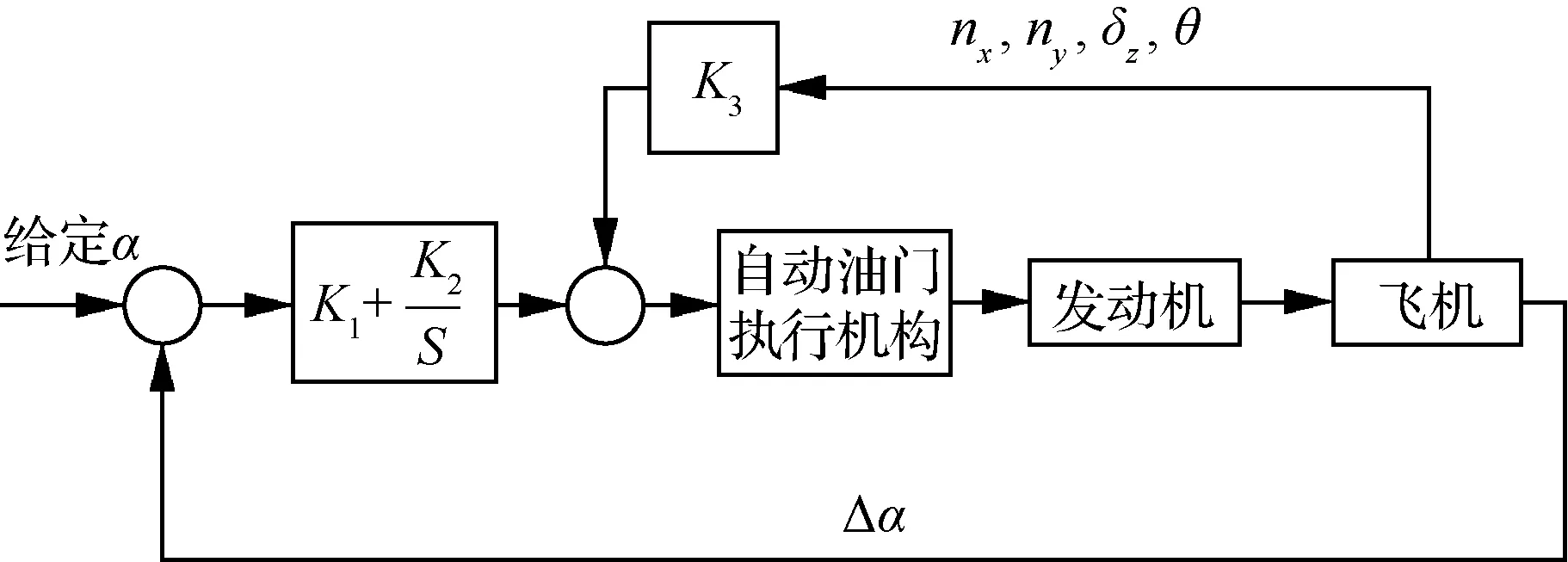
图10 基于迎角恒定的进场动力补偿[25]Fig.10 Approach power compensator system based on angle of attack constant control method[25]
采用动力补偿技术后,航迹角Δγ对俯仰姿态角Δθ的响应跟踪特性显著改善,如图11[23]所示(图中t为时间)。其中曲线1为无动力补偿,可以看出Δγ不能有效跟踪Δθ;曲线2为保持速度恒定的动力补偿,响应时间较长且有跟踪静差;曲线3为保持迎角恒定的动力补偿,响应加快但阻尼不足;曲线4为保持迎角恒定并加入法向加速度反馈控制,航迹跟踪响应得到了显著加快,振幅降低很多。
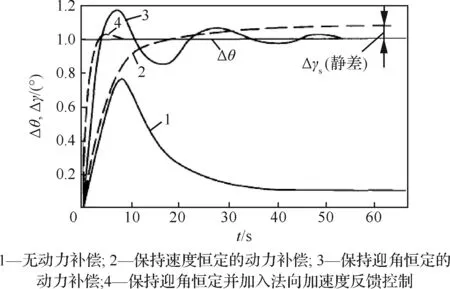
图11 航迹跟踪响应[23]Fig.11 Response of flight path tracking[23]
采用进场动力补偿技术可以实现对发动机推力的全程自动控制,即减轻了驾驶员的操纵负担,又有利于实现最佳推力着舰下滑,节省燃油,延长发动机寿命。但是,如图11中的曲线4所示,为了更好地降低航迹角Δγ对俯仰姿态角Δθ的有效跟踪性,还需要进一步引入航迹速度或加速度反馈控制。
2.3 甲板运动补偿控制
1) 航迹率控制技术
航空母舰舰体前行时,海浪所造成的舰体三自由度偏摆运动及垂直起伏运动,使飞机的预期着舰点变成三维空间上的运动点;除常规大气紊流扰动外,甲板俯仰所引起的尾流扰动以及舰体前行在尾部出现的雄鸡尾式气流诱发气流分离,若不对其进行补偿控制,仅雄鸡尾气流就可导致39 m的纵向着舰误差。在大气干扰、舰尾流和甲板运动等外界干扰条件下,为了更好地实现精确轨迹着舰,提高着舰成功率,需要在进场动力补偿的基础上引入航迹率控制[24,26-30]。文献[24]在进场动力补偿的基础上采用了升降速率H-dot控制,有效地克服了雄鸡尾气流的影响,用升降舵控制飞机的俯仰角,同时由推力补偿系统控制飞机的迎角和速度,这就能在下滑期间保证飞机的速度和航迹角,大大提高了飞机的纵向着舰精度。章卫国等[26]在借鉴文献[24]的基础上,基于动力进场补偿技术,但不考虑直接升力控制技术,研究了某舰载机的纵向自主着舰控制系统设计与仿真,考虑了海浪引起舰体俯仰与垂直起伏运动,忽略了舰体的偏航与侧滚运动的影响,得到飞机实际下降轨迹跟踪理想下降轨迹的曲线如图12[26]所示,实际下降轨迹对理想下降轨迹的垂直高度跟踪误差(ΔH)曲线如图13[26]所示,其中横坐标L表示距离触舰点的纵向距离。其研究表明采用升降速率控制系统能有效地抑制风干扰;在没采用直接力控制(Integrated Direct Lift Control,IDLC)的条件下,所设计的飞行/推力综合控制系统也能有效地抑制风干扰,并能很好地跟踪舰体运动,纵向着舰精度得到了很好的控制。
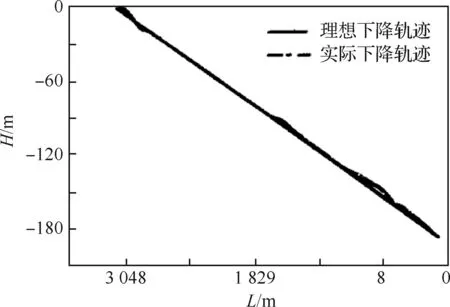
图12 飞机实际下降轨迹与理想下降轨迹曲线[26]Fig.12 Curves of true and ideal landing tracks of aircraft[26]
图13 实际与理想下降轨迹垂直高度跟踪误差曲线[26]Fig.13 Error curve of ideal and true landing track for vertical height [26]
文献[21]针对F/A-18A自动着舰系统的研究中,采用舰载机垂直速度和垂直加速度作为基准反馈信号(分别通过反馈航迹角和法向过载来实现下滑道的精确跟踪控制),并称之为H-dot指令。航迹角反馈是指通过调节舰载机俯仰姿态来改变其航迹,把航迹中垂直速度的变化量引入到反馈控制系统中以体现航迹角的变化量,实现对指令下滑道的精确跟踪;法向过载反馈是指把垂直加速度引入到反馈控制系统中,以控制航迹。文献[30]在引入保持迎角恒定的进场动力补偿系统控制的基础上,研究了航迹率控制技术的引入对舰载机纵向阶跃扰动控制的影响特性;其研究表明H-dot指令反馈对航迹保持的影响最为显著,而法向过载反馈的影响最弱。因此,在舰载机进场着舰轨迹精确控制所需的航迹率控制技术中,应优先保证垂直速度反馈。
全天候着舰模态包含4种工作模态:模态Ⅰ(自动着舰引导系统(ACLS))、模态ⅠA、模态Ⅱ(仪表着舰引导系统(ILS))和模态Ⅲ(舰上控制进场系统(CCAS))[6,11]。除了着舰模态Ⅰ外,其他着舰模态若通过改变升降舵偏角改变俯仰姿态角Δθ进而调整航迹角Δγ,将存在跟踪静差,从而无法达到降低飞行员操纵负担的目的;这主要是因为没有从本质上对航迹与姿态之间所存在的显著耦合进行解耦,体现在驾驶员操纵负担上就是“看灯”和“保角”操纵存在耦合。“看灯”需要调整时,其航迹操纵将会引起“保角”中迎角的变化,反之亦然;使得舰载机着舰控制系统设计人员一直在考虑如何对“看灯”和“保角”操纵进行解耦。
2) 直接力控制技术
对于常规飞机的机动,是通过驾驶员操纵平尾产生偏转,从而改变飞机的迎角,以实现改变飞机的飞行轨迹。直接升力操纵是指驾驶员通过组合的舵面操纵,在不改变全机迎角的情况下,使飞机的总升力产生变化,进而在该升力变化的作用下使飞机的飞行轨迹发生改变[31-32]。因此,直接力控制具有3个技术特点:① 直接力操纵是通过直接控制作用在飞机上的力,而不是控制作用在飞机上的力矩,来改变飞机的轨迹;② 在直接升力控制过程中,飞机的迎角变化较小;③ 直接力操纵要求飞机多个操纵面的组合联动。
最初采用直接力控制获得收益的是F-8舰载机,通过偏转后缘襟翼改变机翼弯度从而达到改变全机升力的目的,以实现精确控制航迹的升降。F-8舰载机驾驶员通过实际操纵,发现采用直接升力控制可显著地改善航迹保持精度,使得美国海军在F-14舰载机的设计之初就考虑了直接升力控制技术。F-14战斗机是机械操纵飞机,其飞行员在着舰飞行训练时,感受到了直接力控制改善航迹品质的收益,但是以增加飞行员操纵负担为代价。因为航迹与迎角耦合较严,飞行员要操纵纵向操纵杆、油门和新增的IDLC指轮驱动器。当然,在F-18电传飞机上,IDLC交给飞控计算控制,减少了飞行员操纵负担[33]。在X-35C验证机上,取消了IDLC手轮控制器,把襟翼和副翼控制直接升力的操纵交给飞控计算机,作为手动着舰状态下油门操纵的响应或者是自动着舰状态下纵向驾驶杆操纵的响应[34]。文献[16]研究了F/A-18E/F舰载机的直接力控制特性,发现通过后缘襟翼和副翼的偏转可提供的直接力增减量相当于改变3°的全机迎角所引起的升力变化,并且通过偏转后缘襟翼控制直接力的增减仅需要0.3 s,远远快于通过改变全机迎角来控制全机升力的增减,如图14[16]所示,图中CL为升力系数,TEF表示后缘襟翼偏转角度,Aileron表示副翼作为襟翼使用以产生增升效果时的偏转角度。
在飞机上可用于操纵直接力的气动舵面有前缘襟翼、后缘襟翼等,由于这些气动舵面都距离全机的重心有一段距离,所以直接力操纵面的偏转都会对飞机产生力矩作用,从而需要对直接力操纵进行力矩补偿,一般需要通过微调(襟翼距离重心相对升降舵距离重心非常小)升降舵来配平该力矩。需要注意的是微调升降舵一般交给飞控计算机来执行,不需要飞行员额外的操纵负担。如此一来,航迹的升降与迎角的保持可以分别来控制,避免了之间的耦合关联。
图14 F/A-18E/F直接力控制[16]Fig.14 Integrated direct lift control for F/A-18E/F[16]
从直接力的控制逻辑可以看出,为了控制航迹的升降以保证等角下滑,不需要通过调整俯仰姿态角Δθ改变全机升力来改变航迹角Δγ,从而在控制逻辑上避免了Δγ对Δθ的跟踪,实现了“看灯”与“保角”之间的解耦。因此,直接力控制可以改善有人驾驶飞机的性能和操纵品质,减轻驾驶员的工作负担,并有利于实现着舰过程中的精确控制轨迹。
3) DP(Delta flight Path)控制技术
在舰载机着舰的最后阶段,当飞机实际高度与理想下滑轨迹的偏差上偏1.5 m时,拦阻钩很容易挂空,飞机需要逃逸复飞[35-39]。当飞机实际高度与理想下滑轨迹的偏差下偏1.5 m时,飞机有撞舰危险[40-43]。
航空母舰的运动,平动称为“荡”,转动称为“摇”,其六自由度运动包括:纵向的垂荡、纵荡、纵摇运动;横向的横荡、首摇、横摇运动。甲板运动将导致舰载机的理想着舰点成为三维空间的运动点,从而增加了着舰难度,甚至导致着舰失败。为了更加精确地控制着舰轨迹,提高舰载机的着舰成功率,需要在着舰控制系统中考虑甲板运动的影响。
文献[16]针对F/A-18E/F舰载机研究了DP控制模式,如图15所示,并通过飞行员模拟着舰,验证了该技术对提高着舰成功率的影响。
文献[39]对甲板的侧向运动补偿进行了研究,进一步完善了DP控制着舰技术。一般将甲板运动或预估信息提前10~13 s加入着舰控制系统,以减少飞行员着舰操纵负担[6]。因此,在DP控制技术中尽可能多地考虑甲板运动预估及补偿,能够使着舰误差限制在军用安全标准规定的范围内,提高航空母舰舰载飞机武器系统的作战能力。
图15 DP控制模式[16]Fig.15 DP control mode[16]
2.4 平显增强显示协助飞行员决策
现代航空母舰一般采用斜角甲板,使得航母航行速度方向与飞机进场速度方向存在一个夹角,当舰载机进入到着舰下滑进近区域后,需要实时操纵方向舵(一般是微调方向舵),从而实现实时“对中”。与纵向解耦需要引入直接升力控制面不同,舰载机进场过程中航向和纵向是天然解耦的。在“对中”策略的整个控制过程中,需要把航空母舰的航行速度通过数据通信链反馈到飞机的航向飞行控制系统中,作为外界的扰动,实现“对中”控制的自动化全过程,从而减少飞行员航向操纵的负担。这一点与自动油门控制着舰技术不需要把航空母舰的航行速度引入到飞控系统中不同,这也解释了为什么需要把航空母舰的航行速度显示在平显上,供驾驶员着舰参考。
另外,为了提高着舰精确性,降低飞行员的操纵负担,以提高着舰成功率,需要将更多的着舰参考信息,如飞机下沉速度、航空母舰的航行速度等信息显示在驾驶舱的平显上,供飞行员着舰操纵参考,最引人注目的是在平显中引入了下滑道参考线信息,如图16[16]所示。

图16 着舰平显增强显示[16]Fig.16 Head-up display symbology for landing[16]
3 舰载机进场着舰引导与控制规范
为了更好地提高舰载机进场着舰轨迹的控制精度,需要对引导与控制技术进行规范化和标准化。美国海军航空作战中心飞机处(Naval Air Warfare Center Aircraft Division)的Rudowsky等[31]综述了舰载机进场着舰标准与规范,主要指标包括着舰速度、飞行品质、油门响应、复飞和逃逸、下滑道转移机动等性能要求。
3.1 着舰精度影响因素
进场速度将直接影响舰载飞机着舰成功率,进场速度太大,飞行员和系统的响应时间太短,速度太小,飞机容易失速。影响进场速度确定的因素主要有以下几点:
1) 失速裕度。失速裕度是最古老的舰载机进场要求。一般要求着舰进场速度不能低于1.1Vs(Vs为失速速度)。
2) 纵向加速要求。以最小进场速度Vpamin平飞时,从油门动作到军用推力位置要有足够的纵向加速效应,温度为18 ℃时要在2.5 s内至少达到1.5 m/s2。
3) 变轨机动需求。变轨机动要求体现了飞机高度偏差纠正能力,要求飞机以不超过一半过载能力的升降舵偏度,5 s内可纠正15 m的高度偏差。
4) 品质规范要求。在以进场速度Vpa动力进场过程中,飞机品质必须满足GJB185—1986有人驾驶飞机(固定翼)飞行品质中关于军用飞机飞行品质相关要求,对于舰载飞机,必须保证良好的横滚性能和轨迹稳定性。
5) 视场要求。为了满足舰载飞机全天候进场着舰能力,在进场着舰过程中,飞行员能够看到甲板中心线和舰尾,以确保飞行员维持下滑线和良好的对中能力。
3.2 着舰误差规范
着舰误差规范是评估着舰轨迹控制精度的依据,文献[15]对舰载机着舰误差规范进行了较为详细的介绍。相对于理想下滑道垂直高度偏差的限制为:① 若误差上偏转1.5 m,飞机需逃逸复飞;② 若误差下偏转1.5 m,则飞机有撞舰危险。对理想着舰点的平均误差规范及影响也进行了说明,认为理想着舰点的平均误差小于3 m,3~7.58 m内认为是可接受的,当着舰误差大于7.58 m则会产生大量逃逸和短着舰。文献[42]给出了典型舰载机平均纵向着舰误差,可供相关设计人员参考,如表1所示。
在着舰试飞验证中还定义了登舰率为
(1)
式中:η为登舰率;NS为着舰成功次数;Nw为欲着舰次数;Nf为因某些故障不能着舰的次数,某些故障是指:由于甲板堵塞而复飞、产生舰转动、出现59.264 km/h以上甲板风、出现明显的飞机故障(如飞控系统、动力补偿系统、信标系统故障等)。着舰控制中心故障、着舰工作模态的降级、飞行员接管以及LSO复飞等均包含在欲着舰范围内。

表1 典型舰载机平均纵向着舰误差
注: 1 ft=0.304 8 m
3.3 着舰引导与飞控系统设计准则
为了提高着舰控制精度及登舰率,文献[15]以F/A-18飞机的自动着舰引导与控制系统设计背景为例,给出了着舰引导与飞行控制综合系统的设计准则:
1) 含自动油门动力补偿的纵向飞控系统的频带应大于1.2 rad/s,以保证制导系统(外回路)的高度轨迹响应及甲板运动补偿的动态响应性能。
2) 在气流扰动下,应尽可能使轨迹误差减到最小。这是由于随机阵风与舰尾流是着舰误差的最大来来源。因此,宜采用有快速抑制气流扰动的H-dot飞控系统或含直接力控制的飞控系统。
3) 应采取有效的措施,如α-β滤波器使雷达噪声的影响减到最小,以减少噪声进入系统,出现舵面激烈振动现象。
4) 抑制结构模态振荡。主要是因为ACLS自身的高增益易引起舵面作动器的共振。
5) 降低数据处理与数据传输的时延,尽可能地避免制导系统中制导律计算及控制信号传输时延造成ACLS稳定性下降。
6) 克服构成ACLS综合系统的各子系统之间可能出现的不利耦合。
7) 采取飞行安全措施,如故障检测器或指令限制器,使得故障瞬变时能够隔离故障系统。
由于F/A-18飞机的舰载制导律计算机、数据链及机载惯导系统无余度,为了防止部件故障而使ACLS发生激烈的瞬变,其飞控系统还采取几点措施:① 采用四余度俯仰和滚转指令限制器,当故障发生时,纵向通道可限制的最大俯仰角速度为3 (°)/s,横滚通道可限制的最大横滚角速度为11 (°)/s,如此一来,当飞行员有时间发现不正常状态,可及时接管飞机;② 迎角大于14°或小于-6°,横滚角大于70°则由监控器切断飞控系统;③ 惯导、数据链、舰载计算机系统发生故障时,切断飞控系统;④ 若ACLS轨迹误差Ze超出允许值,则由ACLS的自动模态转到手动模态;⑤ 只要飞行员在驾驶杆上施加22.23 N的俯仰杆力或15.56 N的横向杆力,飞行员在任何时候均可以重获手动控制权。
4 舰载机进场着舰精确轨迹控制的收益
美国海军把直接力控制技术、基于进场动力补偿的航迹率控制技术、基于甲板运动补偿的DP控制技术、平显增强显示技术等综合考虑,开发出适用于舰载机的“魔毯”着舰控制技术[15]。
美国海军针对F/A-18E/F舰载机邀请了5位 资深驾驶员,分别采用常规的手动控制(M)着舰技术、自动油门(AT)控制着舰技术和基于航迹(FP)控制技术的“魔毯”控制技术进行模拟着舰,并对着舰过程中飞机驾驶员感受到的操纵品质进行打分,结果如图17[16]所示。图中绿色区域表示可顺利完成预定的着舰任务,黄色区域表示可完成着舰任务但是驾驶员操纵负担较大或者是完成着舰任务的效果较差,红色区域表示驾驶员操纵负担过重或完成着舰任务的效果较差。通过评估结果可以看出, “魔毯”控制技术具有显著的优势,可大大减轻驾驶员的着舰操纵负担。
图17 F/A-18E/F着舰模拟品质评价[16]Fig.17 Evaluation of simulation qualities of F/A-18E/F landing [16]
图18给出了依次逐步增强控制的F/A-18E/F战斗机触舰前20 s进近着舰的4个时域仿真输入,可以体现出驾驶员的操纵工作量,其中WOW表示触舰。图18(a)表示驾驶员人工操纵油门杆和姿态操纵杆进近着舰(图中1 in=2.54 cm),为了得到期望的着舰精度,需要驾驶员输入连续的高频、高幅值的姿态操纵。图18(b) 是采用自动油门控制着舰输入响应,油门杆控制交给飞控计算机,驾驶员仅操作姿态操纵杆,从而减少了驾驶员操纵油门的工作量,由输入响应曲线可以看出,采用自动油门控制技术仍然需要驾驶员输入与手动着舰类似的连续的高频、高幅值的姿态操纵。图18(c)是在自动油门控制技术的基础上进一步引入FPAH(Flight Path Angle Hold)技术和IDLC控制技术,可以看出姿态操纵的输入频率和幅值得到了一定的降低,说明引入该控制技术减轻了驾驶员操纵负担。图18(d)是在图18(c)的基础上进一步引入DP技术,可以看出驾驶员操纵驾驶杆的操纵量进一步减少,说明大大减轻了驾驶员的操纵负担,而且航迹角保持响应的速度也更快。
针对F/A-18E/F舰载机和F-35C舰载机,分别采用有资质驾驶员手动着舰(Carrier Qualification landing,CQ)、自动油门控制技术+FPAH、DP控制技术等进行着舰仿真模拟。触舰点分散度对比如图19[16]所示。由触舰对比图可以看出,采用DP控制技术可以显著地改善舰载机的触舰精度。

图18 控制增强对F/A-18E/F着舰模拟输入的影响[16]Fig.18 Effect of control augmentation on inputs of F/A-18E/F landing simulation[16]
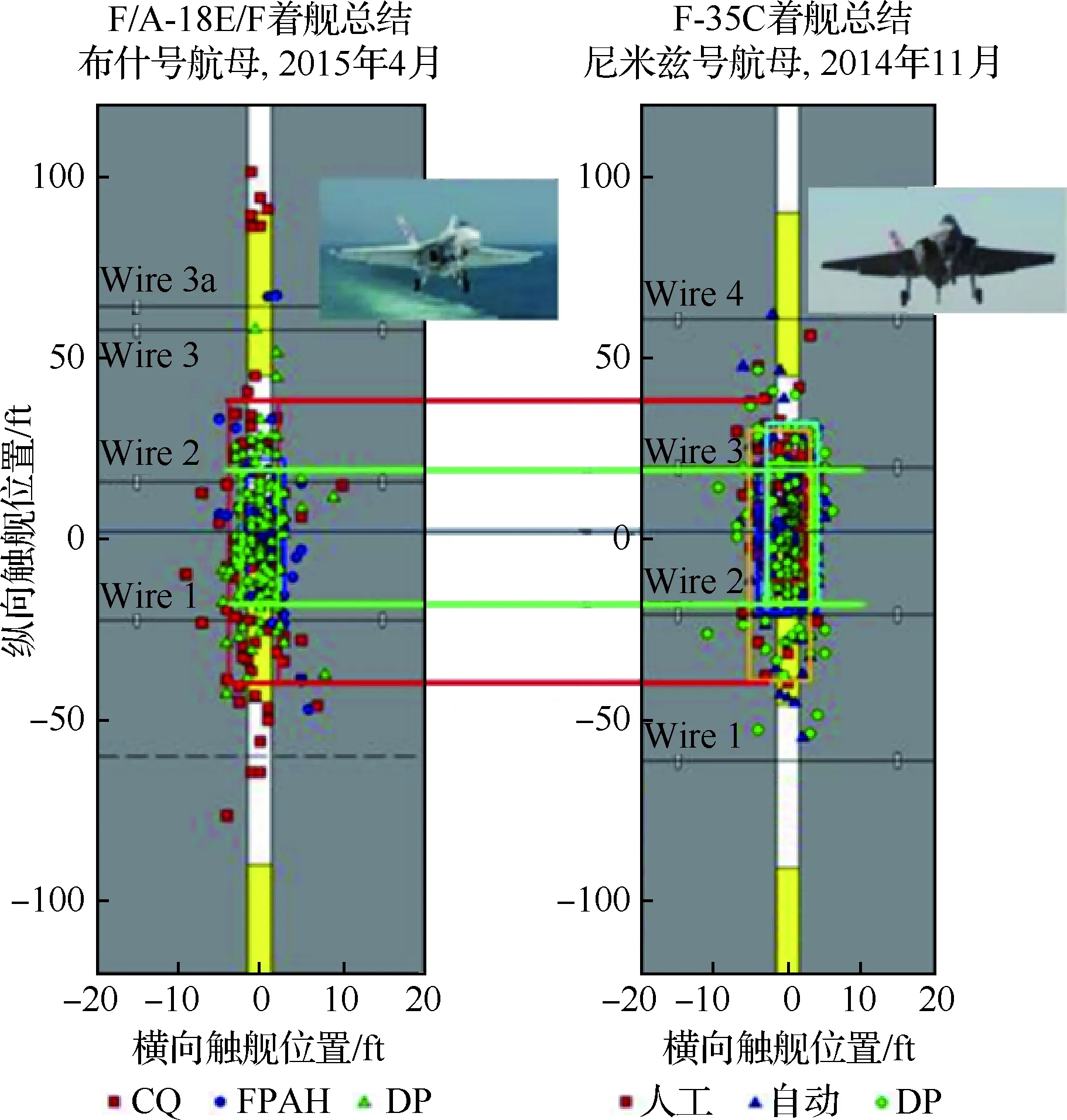
图19 F/A-18E/F和F-35C触舰分散度对比[16]Fig.19 Comparison of touchdown dispersions between F/A-18E/F and F-35C[16]
舰载机的寿命和疲劳特性等主要受限于触舰载荷,而触舰载荷主要由触舰法向速度的大小决定。由于舰载飞机在航空母舰上着舰需要采用无平飘着舰方式,所以飞机的下沉速率比岸基飞机大得多。当海上有风浪时,航空母舰有沉浮运动,使舰载飞机的下沉速率进一步增大,有时会达到6 m/s,几乎是岸基飞机最大允许下沉速率的2倍,所以舰载飞机起落架必须加强,轮胎胎压也要提高,如F/A-18E/F的舰载型前后轮胎压分别是岸基型的2.3倍和1.8倍。因此,采用先进的飞行控制技术通过减小触舰法向速度可以达到减小触舰载荷的目的,从而进一步降低对起落系统的要求,减轻结构重量。
针对F/A-18E/F舰载机,美国海军通过舰驾驶员人工操纵着舰,形成了触舰载荷样本S-67、S-68、S-71并与FPAH和DP增强控制模式的触舰法向速度进行了对比,如图20所示[16]。

图20 触舰法向速度对比[16]Fig.20 Comparison of vertical velocity at touchdown[16]
由对比结果可以看出,随着控制技术的增强,舰载机的触舰法向速度得到了显著的削弱,说明了先进飞行控制技术对现代舰载机的着舰可起到显著的改善作用。据美国海军报道,采用“魔毯”控制技术(直接升力+航迹率保持+DP+增强平显)可有效降低触舰载荷的50%之多,从而显著地有利于舰载机的机体疲劳寿命。
5 结 论
高精度的进场着舰是舰载机形成战斗力的重要保障,具有涉及关键技术多、系统复杂性高、着舰影响因素多等特点。本文对舰载机人工进场着舰精确轨迹控制技术开展了一定的讨论,主要得到以下几点结论:
1) 现阶段,舰载机进场着舰的操纵任务仍然比较繁重,在未来的很长一段时间内,舰载机的精确轨迹控制系统仍需要进一步发展,以承担更多原本飞行员需要承担的工作,从而提高着舰精度,减轻飞行员操纵负担,降低舰载机飞行员培训费用。
2) 提高舰载机进场着舰轨迹控制的精度,可通过飞控系统全自动操纵替代飞行员的“看灯”、“对中”和“保角”等部分操作工作,有效地降低飞行员操纵负担,提高着舰成功率。舰载机进场着舰轨迹控制的终极目的是全自动化着舰代替飞行员人工操纵的“看灯”、“对中”和“保角”操纵。
3) 从舰载机人工精确轨迹着舰控制技术的发展趋势看,直接升力控制技术可以从本质上解决航迹率对姿态的跟踪静差较大的难题,并且具有响应速度快、产生的额外俯仰力矩小等特点,是舰载机精确轨迹控制技术进一步发展的主要路线之一,值得相关设计人员进一步加深研究。
4) 通过引入航迹率控制技术对舰载机着舰轨迹进行精确控制,可以有效地减小触舰点分散度、降低触舰法向速度进而降低舰载机的触舰载荷,有利于减轻该类飞机的结构设计重量,值得在舰载机的设计中进一步推广应用。
5) 从机械式操纵的F-14战斗机驾驶员使用扰流板、襟翼等以提高着舰精度,到电传操纵的F-18战斗机使用进场动力补偿技术进一步减轻飞行员操纵负担,再到F-18战斗机提出的“魔毯”控制技术提高着舰成功率等,可以看出舰载机精确轨迹着舰与控制对较好的着舰操纵品质有着迫切的需求,是未来舰载机设计需要着重关注的设计点之一。