机器人视觉检测在工业中的应用探讨
2019-04-18宋承秀刘凯
宋承秀,刘凯
机器人视觉检测在工业中的应用探讨
宋承秀,刘凯
(大连豪森瑞德设备制造有限公司,辽宁 大连 116036)
工业环境中,特别是人工成本增加,自动化率节节升高的今天,人来做测量尺寸和判断会因为疲劳、个人之间的差异等产生误差和错误,但是机器不会,因此机器人加视觉系统已经成为了越来越普遍的应用模式。机器人视觉系统就是利用机器代替人眼来做各种测量和判断。它综合了光学、机械、电子、计算机、图像处理、光机电等多个领域。文章就机器人与视觉相机相结合在装配线中代替人工上料的应用进行了探讨与介绍。
机器人;视觉系统;图像处理
前言
当装配线上的上线工位需要上线的零件不规则分布在料架上时,传统装配方式只能靠工人人工搬运到线上,费时费力,影响效率。但是现在可以使用机器人加视觉相机组合成一个简单的机器人视觉系统,来代替人工搬运,大大加快了效率。本文就机器人在装配线中代替人工进行视觉判断后搬运上线的应用进行了详细的介绍。
1 视觉系统架构
1.1 选用的设备
西门子S7-300PLC 用于逻辑控制,相机与机器人之间通讯;
FUNAC机器人用于搬运工件;
康奈视相机用于计算工件偏移量的变化值;
康奈视激光光源用于辅助计算工件偏移量变化值。
1.2 固定的相机和固定于机器人的相机
1.2.1固定相机
将相机固定设置在架座等上。相机始终从相同距离观察相同部位。可以与机器人进行其它作业期间并行地进行视觉的测量,因而具有缩短总体周期时间的优点。利用固定相机观察放置在工作台等上的工件而进行机器人动作补正的补正方法,就是位置补正。伸到固定相机前对机器人把持的工件进行测量,将该工件正确放置到规定位置的补正方法,就是抓取偏差补正。
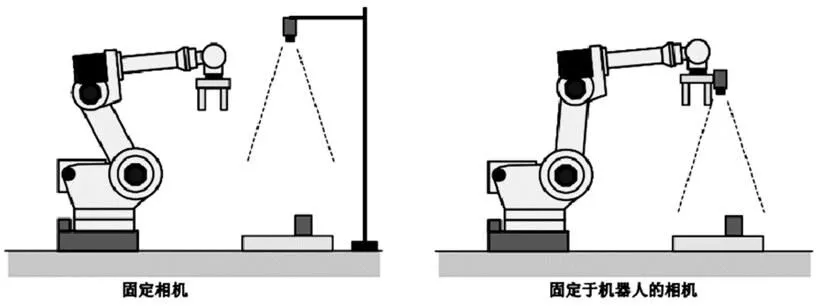
图1 固定相机和固定于机器人的相机
1.2.2固定于机器人的相机
将相机设置在机器人的手腕部。通过移动机器人,可以利用 1 台相机对不同场所进行测量,或者改变工件与相机的距离。固定于机器人的相机的情况下, 需要考虑机器人移动造成的相机的移动部分而计算工件的位置。利用固定于机器人的相机观察放置在工作台等上的工件而进行机器人动作补正的补正方法,就是位置补正。
因固定于机器人的相机方式实用性更强,本次主要以固定于机器人的相机来进行探讨。
1.3 相机标定
要实现将相机采集的数据转化为机器人坐标系下的位姿数据,必须建立相机坐标系与机器人坐标系的对应转换关系,该过程通过相机标定实现。

图2 相机标定结果
1.4 相机数据计算
通过相机拍照后工件偏移与坐标系比较得出机器人偏移数值,传递给PLC。
2 PLC设置

图3 PLC硬件组态
数据流程:相机—>PLC—>机器人
PLC是相机和机器人之间的桥梁。以PLC为主站,相机和机器人为从站组成Profinet网络进行数据交换。
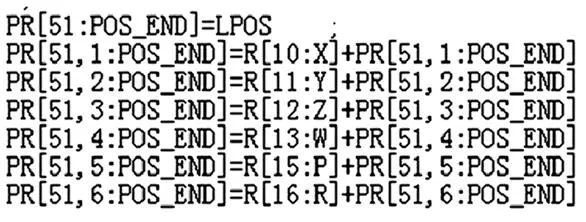
3 FUNAC机器人设定
FUNAC机器人可以使用OFFSET指令对抓取的工件位置进行偏移,需要相机每次抓取工件前进行照相计算出偏移值(X、Y、Z、W、P、R),然后把值通过PLC计算后传递给机器人。
FUNAC机器人普通情况下不支持浮点数传递,只能传递整数PLC需要定义好偏移值的信号的正负和放大倍数,从而达到机器人精准偏移。具体信号如下:
表1

计算过程:例如:相机计算出的Y轴偏移量值-1.31
这个值传递给PLC后,PLC 需要先判断偏移值的正负,如果该值<0,PLC给机器人的Y-负DI信号置为1,同时把1.31X100变为131放到OFFSET_Y GI组信号中传给机器人,机器人在把收到的OFFSET_Y中的值除以100后与Y-负信号关联组合。依次把所有PLC传递的偏移值计算出后,机器人对位置点再进行偏移,最终保证夹取位置正确。
4 总结
在生产线上,人来做此视觉判断和搬运会因疲劳、个人之间的差异等产生误差和错误,但是机器人却会不知疲倦地、稳定地进行下去。机器人加相机组成的视觉系统,在未来工业智能制造中比重回越来越大,承担更多的任务。
[1] FUNAC机器人视觉系统.
[2] 机器人技术手册.日本机器人协会(宗光华、程军实等译).
[3] 叶晖.工业机器人典型案例精析[M].机械工业出版社,2013.
Application of Robot Vision Inspection in Industry
Song Chengxiu, Liu kai
( Dalian Haosenread Equipment Manufacture Co., Ltd, Liaoning Dalian 116036 )
In the industrial environment, especially with the increase of labor cost and automation rate, people will make errors and errors in measuring size and judging because of fatigue and differences between individuals, but the machine will not. Therefore, robot plus vision system has become a more and more popular application mode. Robot vision system is to use machine instead of human eyes to make various measurements and judgments. It integrates optics, machinery, electronics, computer, image processing, optoelectronics and other fields. In this paper, the application of the combination of robot and visual camera to replace manual feeding in assembly line is discussed and introduced.
Robot; Visual inspection; image processing
U466
A
1671-7988(2019)07-187-02
宋承秀(1987.5-),男,电气工程师,就职于大连豪森设备制造有限公司电气设计部,从事PLC与机器人工业应用研究工作。
U466
A
1671-7988(2019)07-187-02
10.16638/j.cnki.1671-7988.2019.07.063
