智能机器人在动力总成装配线中应用探讨
2019-04-18刘凯宋承秀
刘凯,宋承秀
智能机器人在动力总成装配线中应用探讨
刘凯,宋承秀
(大连豪森瑞德设备制造有限公司,辽宁 大连 116000)
工业环境中,特别是智能化日益增加的今天多机器人已经成为了越来越普遍的应用模式。如今机器人各种各样,各种品牌,但能够达到与人协作,没有防护罩,或者代替人类来装配的机器人少之又少,但智能化是未来发展的方向。文章就智能机器人在通用装配线中代替人工装配的应用进行了详细的介绍。
机器人;协作;智能化
前言
当一个工位,比如齿轮啮合工位,传统的装配线智能人工安装,人工操作找正位置才能够装配成功,但现在利用KUKA的iiwa智能机器人就能够达到替代,把一个手动工位变成一个自动工位,提升装配线自动化,也向工业智能化更进一步。
1 了解KUKA的iiwa机器人函数程序功能
(1)iiwa机器人除了具有普通机器人的走位置功能外,还具有按照设定好的函数程序,走相应的函数曲线,例如sin函数:机器人在工具坐标的Y方向上执行相对运动TCP中的系统。 X方向上的正弦力振动被覆盖。下图是坐标系的XY平面中的波状路径:
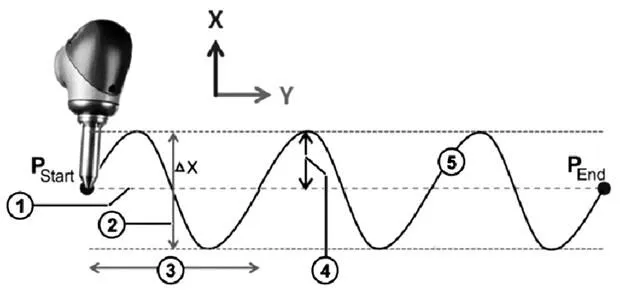
图1 XY平面中的波状路径
(2)除了sin函数曲线外,Lissajous 曲线函数也是比较典型的一种,当正弦力振荡覆盖在2个不同的笛卡尔方向时,即为利萨如曲线。两次振荡的叠加使它可以成为实际上截然不同的形式。实际的路径取决于其中的一些参数:

图2 Lissajous 曲线
除了这两种函数曲线外,iiwa机器人还有多种函数程序,在实际中需要根据需求选择适合的函数即可,这里就不一一介绍了熟悉iiwa机器人的程序之前,我们需要巩固一下我们的Java程序知识,并且了解iiwa机器人特有的类程序。
2 选择函数并设置初始参数
(1)在我们这个工位上我们选择sin函数,因为是齿轮啮合工位,经过多次试验,我们选择sin函数成功率很高,程序如下图:
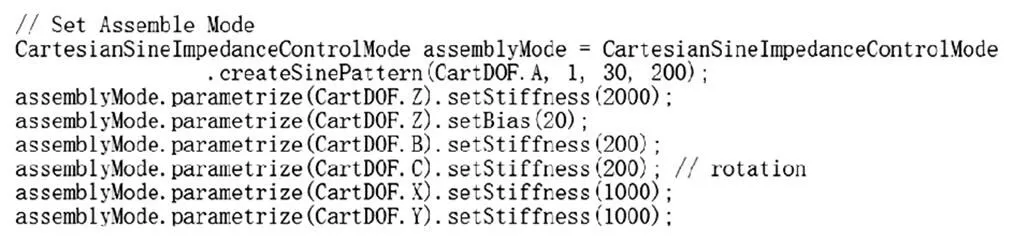
其中我们在C平面是用了sin函数曲线,这样我们就可以在齿轮啮合的时候进行旋转下压,模仿人工安装过程,并且设置好硬度与阻尼后,随着iiwa机器人的实时反馈,不会让机器人与设备卡死而导致报警。
(2)在设置好初始参数后,在程序调用的过程中需要再设置一个函数数程序跳出条件,即安装合格条件设置,这样在iiwa机器人检测到安装成功后,传出合格信号,并且进行下一步动作:

3 设置判定合格程序
在设置好参数和初始参数后,我们还需要选择判定合格的条件程序,在合格条件程序中,根据实际情况进行编写,当然如果实际情况很难达到的话,我们可以用很多巧妙的方法进行修正:

上图的判定程序中,我们就采取了很简单的方式判定Z轴位移,只要齿轮啮合成功,位移肯定在一定范围内,这是比较简单的情况,就不再介绍了。
4 设定机器人安全力
在iiwa配置过程中,我们还需要设置一个力保护,可能在此自动工位中,意义不大,但是在人机协作的工位中,意义很大,如果在运动过程中,检测到超过力保护的撞击,立即停止,保证了人的安全。
5 在关键程序增加注释
编程者需要在每个关键的程序增加注释,以方便读写与更改。
6 测试并修正参数
在我们调试过程中,我们需要反复的修正函数程序中的参数,比如stiff我们需要反复验证比较硬的情况到比较软的情况,哪个更能实现更好的装配效果,还有sin函数旋转摆动的幅度,我们经过了无数次的验证,在变速箱装配线3&4轴装配的工位上实现了99%以上的成功率安装。
7 数据记录
在齿轮啮合工位上,我们还用了数据记录功能,在齿轮啮合过程中,我们实时采集了旋转时候的受力,以数据表的形式储存到机器人控制器中,以方便我们以后分析我们失败的原因;
8 结语
对于智能机器人的应用与亚久有利于工业智能化的发展,同时在自动化越来越强大的未来,许多机器将代替人的工作,工业4.0的时代趋势如此,我们每一个人都应该考虑到时代在进步,我们也都在进步,我们应该与时俱进,向智能化的未来迈进。
[1] KUKA_SunriseOS_110_SI_en.KUKA.
[2] 徐文.KUKA工业机器人编程与实操技巧.机械工业出版社,2017 (5).
[3] 叶晖.工业机器人典型案例精析.机械工业出版社,2013(6).
Discussion on Application of Flexible Robot in Assembly Line
Liu Kai, Song Chengxiu
( Dalian Haosenread Equipment Manufacture Co., Ltd, Liaoning Dalian 116000 )
In the industrial environment, especially today, the increasing number of intelligent robots has become an increasingly common application mode. Nowadays, there are various kinds of robots and various brands, but there are few robots that can cooperate with people, without protective covers, or instead of humans, but intelligence is the direction of future development. This article gives a detailed introduction to the application of intelligent robots in the general assembly line instead of manual assembly.
Robot; Cooperation; Intelligent
U466
A
1671-7988(2019)07-185-02
刘凯(1987-),男,电气工程师/初级,就职于大连豪森瑞德设备制造有限公司,从事于智能机器人应用与电气控制研究工作。
U466
A
1671-7988(2019)07-185-02
10.16638/j.cnki.1671-7988.2019.07.062
