基于红外传感器的智能循迹小车
2019-04-17门筱希孔祥初吴多辉向邦瑞
门筱希,孔祥初,吴多辉,向邦瑞
(三峡大学 电气与新能源学院,湖北 宜昌 443000)
0 引 言
随着机械、电子、控制和信息等技术的迅速发展,智能机器人将在科研、军事、物流业和工业领域有着广阔的前景。智能循迹小车是一种可自动根据规划路径运行的轮式机器人,也是一个集环境感知、分析判断与决策、自动行驶等功能于一体的综合系统[1-4]。它集中运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术[5-7],是典型的高新技术综合体。
多数由纯电子元件控制的自动循迹小车,具有灵敏度低、循迹速度慢、离轨迹有一定误差等特点,且传感器易受环境光影响,因此循迹准确性易因环境变化而受影响[8]。本文设计的智能循迹小车硬件系统由电源模块、传感器模块、控制模块和电机驱动模块构成。红外线传感器和电压比较器LM393[9]作为控制核心,能够使电机在“停转”“半速旋转”和“全速旋转”状态下快速切换,使小车运行轨迹光滑准确。
1 智能小车总体设计方案
小车整体有四个模块,分别为传感器模块、控制模块、电机驱动模块和电源模块,如图1所示。传感器感应光信息,将信号传递至控制模块,控制模块处理信息以控制电机驱动。全过程由电源模块提供能量。
传感器作用为感知光强变化。当黑色轨迹为非直线时,小车左右两电机转速会发生变化,达到转向的目的。由于轨迹弯曲角度不同,为了使小车能够更加精确高效地随黑线转弯,在小车前部左右各装两个传感器,标号Ⅰ、Ⅱ、Ⅲ、Ⅳ,如图2所示。传感器Ⅰ与传感器Ⅳ功能相同,传感器Ⅱ与传感器Ⅲ功能相同。以小车相对轨迹左偏时情况为例,若小车右偏程度低,此时右侧内部传感器Ⅲ感应到黑线,右轮半速旋转而左轮继续全速前进;若右偏程度较高,则右侧外部传感器Ⅳ感应到黑线,此时右轮停止旋转而左轮继续全速旋转,小车大幅度向右调整车头。由于共有两组传感器,当一个电机半速旋转、另一个电机全速时,小车即可微微转弯,大大减小了跑偏的可能性。
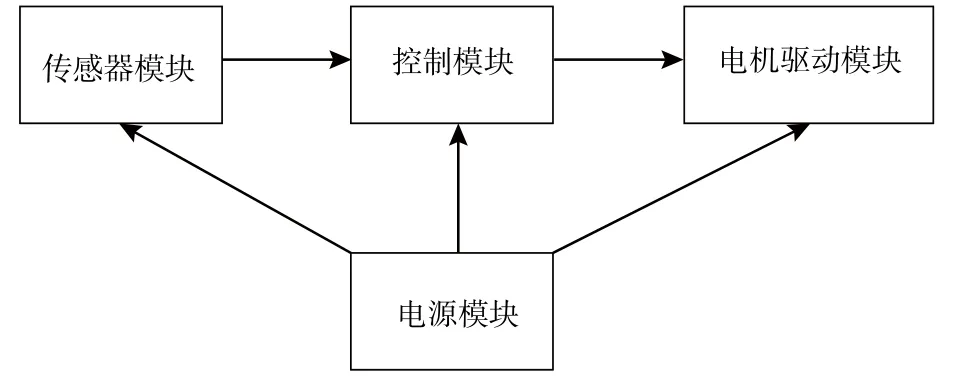
图1 小车系统结构图
1.1 传感器模块电路设计
结合各传感器性能,最终选择红外线传感器作为小车系统的传感器。红外线传感器向外发出光源,通过检测接收的反射光光强大小判断传感器所处环境。图3为红外传感器原理图,其中U2为光电三极管。
当未感应黑线时,光电三极管阻值小,R3上端结点1输出低电平;若感应到黑线,则光电三极管阻值很大,此时R3上端结点1输出为高电平。
绘制小车一侧的传感器控制系统的真值表,如表1所示,其中1表示变阻器下端结点1输出为高电平,0表示结点1输出为低电平。

图2 小车模型图

图3 传感器模块原理图

表1 传感器系统真值表
1.2 信号处理电路设计
信号处理与转换的核心元件是电压比较器LM393。LM393的引脚图如图4所示。
LM393是电压比较器,将接在R-Light端的光敏二极管接收光照时产生的电阻值变化变成电压信号传递给电压比较器的同相输入端INB+。这个变化的电压信号与电压比较器的反相输入端INA-端的基准电压相比较,当同相端INB+电压大于反相端INA-端电压时,电压比较器的输出端输出高电平电压;当同相端INB+电压小于反相端INA-端电压时,电压比较器的输出端输出低电平电压。如图5所示,为了清晰看出电压比较器输入输出之间的关系,从3号输入端输入矩形波,2号反向输入端作比较用。输入矩形波高电平为5 V,低电平为0 V。

图4 LM393引脚图

图5 信号处理模块原理图
示波器波形如图6所示,上方的波形为电压比较器输出的波形,下方的波形为输入的矩形波波形。
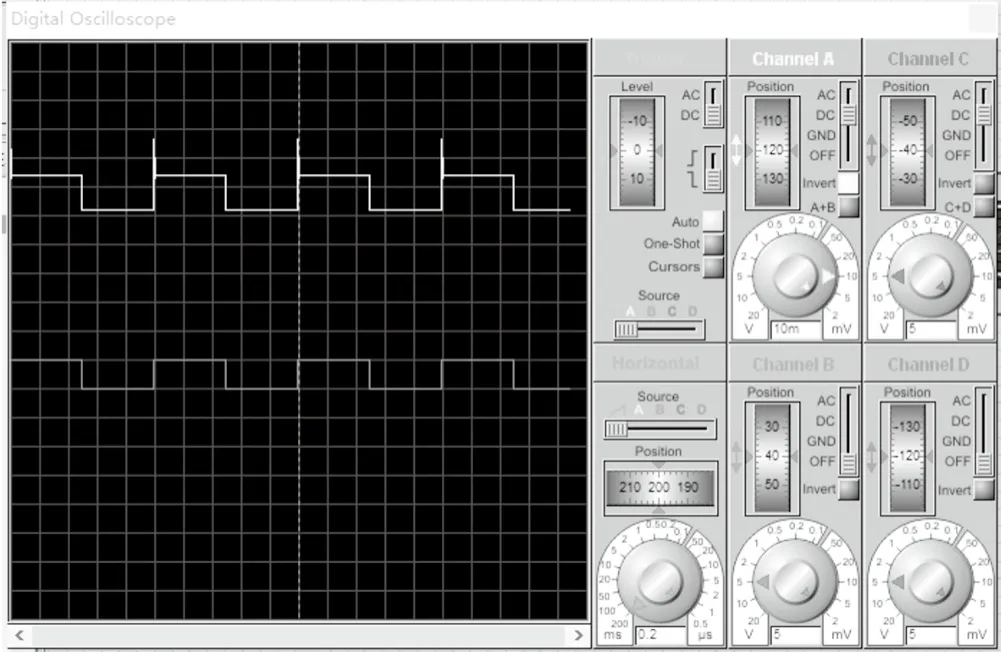
图6 示波器波形图
由波形图可知,当正向输入端电压高于反向输入端时,示波器输出为高电平;当正向输入端电压低于反向输入端时,示波器输出为低电平。即反向输入端作为比较端时,正向输入端波形与输出端波形同步。
1.3 电机模块电路设计
为了使小车转弯的轨迹能够尽量光滑,设计电机驱动模块使小车车轮三种状态分别为“停转”“半速”和“全速”。综合利用三极管的通断和电阻的分压特性,控制电机运行状态中获得的电压大小,从而控制其转速,原理如图7所示。

图7 电机驱动模块原理图
对于Q1、Q2三极管,基极输入高电平时导通,输入低电平时截止。Q1三极管处于截止状态,无论Q2导通与否,电机均处于“停转状态”;而Q1三极管处于导通状态、Q2截止时,电流通过Q1-R10-电机流通,由于R10分得部分电压,因此电机转速受到限制,为“半速”状态;而当Q2导通时,电阻R10被短路,无电阻分压,电机转速较快,为“全速状态”。
2 系统调试与仿真
利用Proteus仿真软件进行仿真实验,仿真电路图如图8所示。由于软件中无法模拟小车循迹行驶,因此选择用可调光敏电阻代替光电三极管仿真,通过调节光敏电阻接收光的光强改变其阻值,从而模拟小车循迹过程。当光敏电阻接收光强度大时,所处的位置为白色区域,对应车体上传感器未检测到轨迹,光敏电阻阻值小,不影响电机旋转,且与电机并联的LED灯正常发光;若光敏电阻接收光强度小,该三极管所处位置为黑色区域,对应车体上传感器检测到轨迹,阻值大,电机转速下降,并联的小灯光亮减弱。

图8 仿真图
2.1 小车沿轨迹正常行进时
此时,小车沿轨迹正常行驶,无传感器监测到轨迹,因此仿真中四个光敏电阻接收到的光强度均较高,两侧电机正常旋转,指示灯D5与D16均正常发光。此时,小车沿正前方全速前进,做匀速直线运动。图9中,四个传感器接收光强度都为正常光强,图10中两个电极全速旋转。
2.2 当小车稍向一边偏离轨迹时(以向右偏离轨迹为例)
当小车稍微向右偏离轨道时,小车上传感器Ⅱ感应到黑色轨迹。图11中,传感器Ⅱ接收光强度几乎为零,表明该传感器检测到黑线;图12中,左侧电机约降为右侧车轮一半,小车向左调整行进方向。
2.3 当小车严重偏离轨迹时(以右偏离轨迹为例)
当小车严重向右偏离轨道时,小车上传感器Ⅰ感应到黑色轨迹。仿真中,该传感器对应的光敏电阻接受到的光强度低,如图13所示。图14中,左侧电机停止旋转,右侧电机全速旋转,小车大幅向右调整车头。

图9 仿真图1

图10 仿真图2

图11 仿真图3

图12 仿真图4

图13 仿真图5

图14 仿真图6
3 实验验证
通过仿真验证所提方案的可行性后,需要用实物进行验证。
首先利用altium designer画出电机驱动部分原理图,做出封装,制作PCB图,利用焊接工具将元器件焊接到铜板上。完成各模块焊接后,将小车进行组装。将小车放置于黑色轨迹始段,连接开关后,小车沿轨迹运行效果较好。图15为小车循迹实物图。
4 结 论
由于传统的智能小车正在向集智能化和自动化于一体的方向发展,因此智能小车被越来越多地应用于生活、工业以及军事的各个方面。它的自动循迹功能对提高工作效率和保障生命财产安全具有重要意义。因此,本文研究并设计了一套基于红外传感器具有自动循迹功能的智能小车系统。对智能循迹小车的发展现状及未来应用前景进行分析后,提出了本文研究的小车的各部分原理及选择,并通过利用仿真软件验证了电路设计理论的可行性,然后自制电路板进行焊接组装小车实物,验证了设计的实际可行性。

图15 小车循迹实物图
本文研究开发的智能小车系统能够完成直行、大转弯和小转弯等功能,且经过实际测试后,确定其自动循迹功能准确可靠。但是,本系统还存在一定的不足。例如,由于纯电子电路的局限性,该小车的循迹速度有待提升。后期可考虑利用单片机控制系统,或者使用芯片,运用算法对小车行进中的轨迹情况进行提前扫描,或者将视觉传感技术引入智能小车系统[10-11],从而更好地探测智能小车的周围环境。
