基于滑模控制的三相PWM整流器的研究
2019-04-17郭珍奇
郭珍奇
(黑龙江科技大学 电气与控制工程学院,黑龙江 哈尔滨 150022)
0 引 言
PWM整流器具有降低网侧交流电流谐波、实现单位功率因数运行、直流侧电压控制恒定以及能量双向流动等优点,广泛应用于电力传动、工业直流电源等领域。由于三相PWM整流器是典型的非线性系统,采用纯线性控制方法研究整流器的控制问题已不适用[1]。为提高PWM整流器的运行特性,人们提出了许多控制策略。文献[2]给出了三相PWM整流器d-q坐标系下的数学模型,并进行了闭环控制分析。文献[3]借鉴矢量合成的思路,设计了无需电感参数解耦控制网络的方案,改善了PI控制器的效果,但并未考虑电压外环网络的本质非线性特征,导致外环鲁棒性差。滑模控制作为非线性控制方法,具有快速响应、对参数变化不灵敏等特点,被应用于PWM整流器控制[4]。文献[5]对电压环和电流环仅采用滑模控制,增强了系统的抗干扰能力和动态响应能力。文献[6]研究了滑模与无源性协调控制的可行性,取得了良好的效果。文献[5]中电流环趋近律和文献[6]中无源参数设计复杂,增加了控制的难度。文献[7]采用PI控制和滑模控制相结合的混和控制策略,较传统PI控制有交强的鲁棒性,验证了混合控制的正确性,但未考虑阻感参数在较大范围内变化时对系统的控制效果。本文分析了PWM整流器的数学模型,采用电流环PI控制和电压环滑模控制的混合控制策略,并在此基础上,提出了改进的滑模控制器,使系统的阻感参数在较大范围内变化时,仍具有良好的控制效果。
1 PWM整流器的数学模型
三相电压型PWM整流器的拓扑如图1所示,图中ea、eb、ec为三相电源电压,ia、ib、i为三相电源电流,L为交流测侧电感,R为电感的寄生电阻,C为直流滤波电容,RL为直流负载。
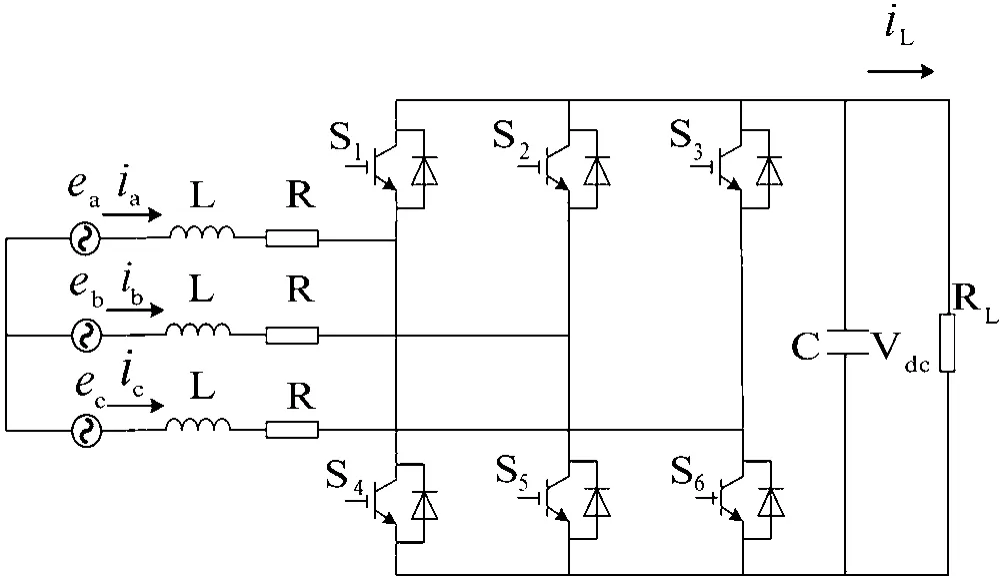
图1 三相PWM整流器拓扑结构
由图1可得,电源对称式三相静止坐标下电压型PWM整流器的开关数学模型为[8]:
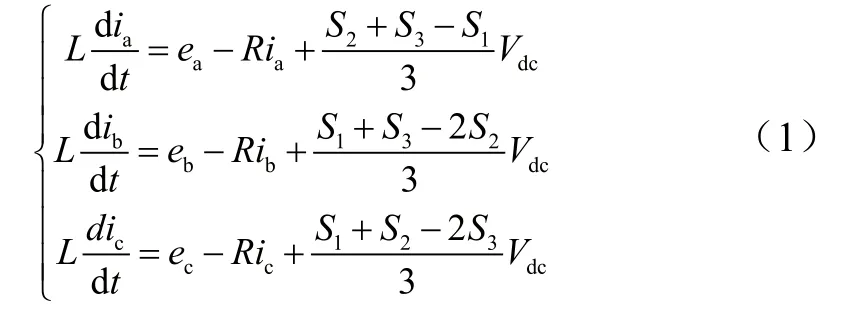
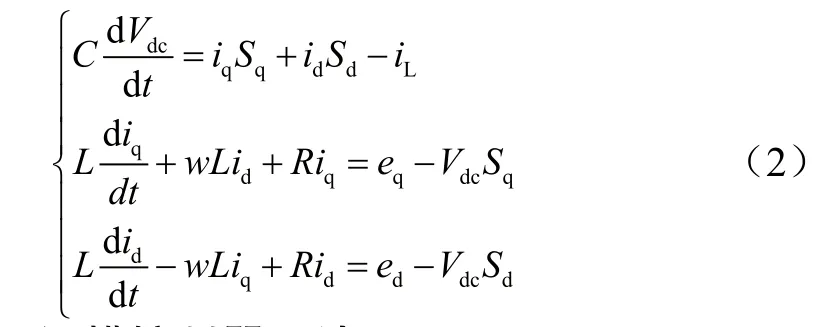
根据“等功率”坐标变换原则,对式(1)进行同步变换,得d-q坐标系下电压型PWM整流器的数学模型为:
2 电压环滑模控制器设计
滑模控制本质上是一种非线性控制,具有响应速度快,抗干扰能力强的特点。PWM整流器中,电压环更易受到扰动的影响,为了使电压环的输出电压更稳定,可采用性能较好的滑模控制器。电流环受到扰动的影响相对较小,在不做较高要求的情况下,可采用PI控制[8]。
2.1 传统滑模控制器设计
由式(2)可得稳态时系统的标准型为:



式中,存在Sd和Sq两个非线性开关量,若使系统能运行于设定滑面上,可求得满足滑面S1时,Sd和Sq的理想值。由S1=0,=0和式(2)可得:

将式(6)代入式(5)可得:

2.2 改进滑模控制器
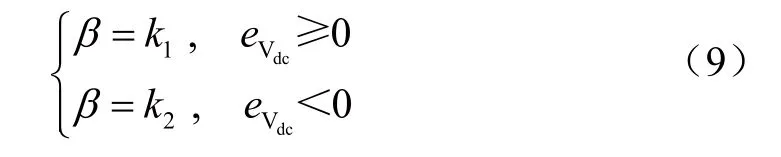
如式(4)所示,β在常用的滑模控制器中为一定值,当电路电感及其寄生电阻发生变化时,可能引起输出电压超调,导致滑模控制控制效果不理想。鉴于电压超调时,β值对电压输出波形有较大影响,改进滑模控制器,设计β参数为:
3 仿真及结果分析
为了验证滑模控制的优越性和改进方法的有效性,本文采用MATLAB/Simulink软件对基于PI控制、滑模控制以及改进滑模控制的三相PWM整流器进行了仿真实验。设置系统参数:交流测电压有效值为220 V,频率为50 Hz,电感L=3 mH,电阻R=0.2 Ω,直流侧给定电压为600 V,电容C=4 000 μV,RL=50 Ω,系统开关频率为10 kHz,电流内环PI控制参数Kp=50,Ki=1,电压外环滑面参数β=6.67,改进后参数为β1=6.67,β2=0.006。
为检验采用滑模控制时电压环的静态和动态特性,0.2 s时将直流侧负载由50 Ω突变为33 Ω,并进行对比仿真实验。如图2所示,采用双闭环PI控制时,输出电压有超调且在约0.1 s时实现电压跟踪;采用滑模控制时,输出电压无超调且在0.05 s前实现电压跟踪。负载突变时,采用双闭环PI控制的输出电压下降并在0.15 s后恢复,而采用滑模控制的输出电压几乎无变化。这说明外环采用滑模控制的PWM整流器具有更快的动态响应速度和更强的抗干扰能力。

图2 负载突变时直流输出电压的波形
图3是L=2 mH时滑模控制改进前后直流侧电压输出的局部波形图,可以看到直流侧输出电压均有超调。改进前电压最大值约为622 V,改进后电压最大值约为613 V,超调量减小了约43%。改进前电压在0.08 s左右稳定,改进后电压在0.02 s前稳定。
通过分析图3可知,改进后滑模控制器交流侧电感发生变化,导致直流侧电压出现超调,减少了超调量,缩短了调节时间。相对于改进前的滑模控制而言,改进后电压输出波形得到了极大改善。
4 结 论
本文在分析研究PWM整流器传统外环滑模控制的基础上,提出了一种改进后的控制方法。通过分析与验证得出:(1)基于外环滑模控制的整流器比采用双闭环PI控制的整流器具有更好的动态性能和鲁棒性;(2)交流侧电感参数变化时,改进后的滑模控制直流侧电压输出超调量降低、调节时间减少,从而证明了改进方法的正确性。
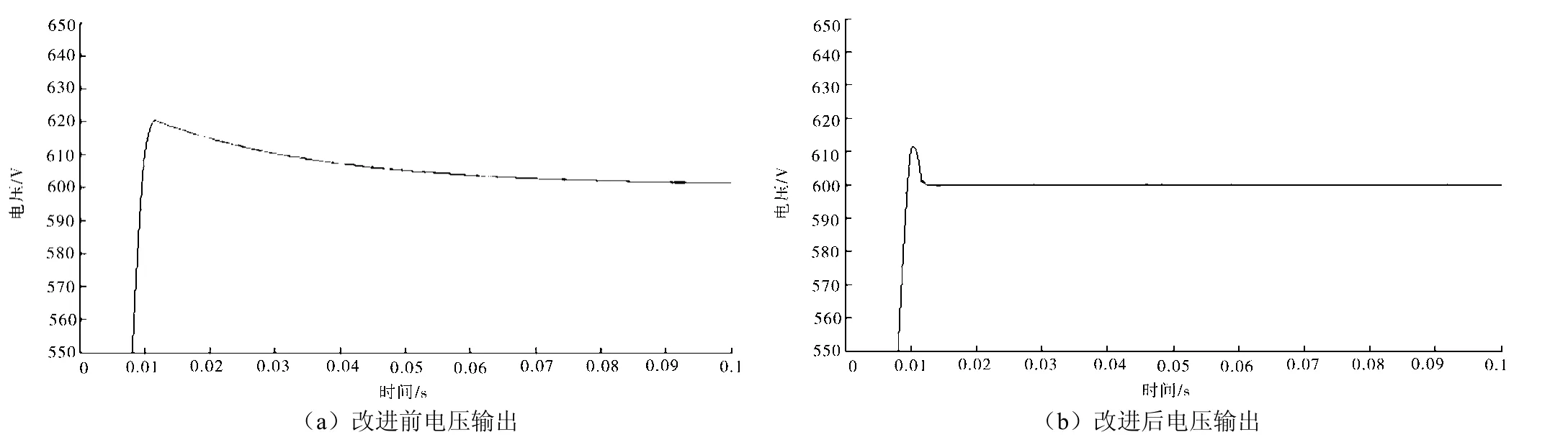
图3 L=2 mH时改进前后电压输出局部波形
