基于自适应阈值的细小裂缝与微灰度差异裂缝自动检测方法
2019-04-16韦春桃余俊辰赵平李小勇
韦春桃, 余俊辰, 赵平, 李小勇
(重庆交通大学 土木工程学院, 重庆市 400074)
1 前言
目前的道路裂缝检测主要是凭借人工检测,不仅效率低下,而且浪费了大量的人力资源。随着图像处理技术的不断发展,路面裂缝由计算机图像技术自动化处理能较好地解决这个问题。但是目前中国还没有一种普遍认可的道路裂缝自动检测方法。
目前,对普通裂缝图像的识别已经有了比较深入的研究:在国外,学者们利用或改进现流行的图像处理方法提取裂缝或者进行图像分类。如Doycheva K等采用中值滤波和顶帽变换去除图像中的噪声和阴影,应用小波变换计算分类值的描述符,基于这个值,图像被分类为良好的路面图像或含有裂缝的图像;Koch C等基于直方图阈值,先将图像分割成缺陷和非缺陷区域,然后基于缺陷区域的潜在坑槽形状的几何性质,利用形态学的细化和椭圆回归近似估计,针对坑槽类裂缝检测效果较好。部分学者结合机器学习与机器视觉的知识,运用分类的思想区分出裂缝图像。如Oliveira H等提出了一种自动选择数据库图像,并用于无监督的训练系统;Banharnsakun A等使用人工蜂群算法(ABC)和人工神经网络(ANN)之间混合的路面破损检测与分类系统;Cord A等基于Adaboost监督学习自动区分道路表面的缺陷图像和无缺陷图像。还有学者从数据信息类别入手,增加数据种类。如:Huang J等将二维(2D)灰度图像和三维(3D)激光扫描数据结合起来,提出了一种基于Dempster Shafer(D-S)理论的方法来提取裂缝。中国国内,学者们利用多特征融合作为特征描述,导入分类器进行分析。如卢紫微等提出一种基于分区域多尺度分析的新型路面缺陷检测算法,从图像的不同尺度上提取裂缝及其周围不同区域的灰度、熵和纹理特征分布信息,获得蕴含方向走势和弯曲程度等参数的特征向量,通过支持向量机(Support Vector Machine,SVM) 的学习并对所得特征向量进行判断,检测出裂缝点所在位置。计算裂缝范围与评估灾害也是中国的研究方向之一。如许薛军利用棋盘格角点求解像素率来实现对桥梁裂缝宽度的计算。部分学者基于像素灰度差异,以及聚类与分割算法提取裂缝。如李清泉提出了一种基于最小代价路径搜索的路面裂缝检测方法,将裂缝提取问题转化为格状图顶点之间最小代价路径搜索的问题;邹勤提出了一种基于目标点最小生成树的路面裂缝检测方法,对于不连续裂缝的处理比较优秀。还有基于频率域的特征检测算法也是研究的热点。如马常霞等利用非下采样Contourlet变换(NSCT)和图像形态学方法来检测裂缝。
以上是关于普通裂缝图像的研究,它们都对此类问题产生了积极的作用,不过其中大部分文献处理的裂缝图像特征较为单一与明显,与生产单位遇到的实际问题结合不够紧密。尤其没有提及细小裂缝的自动检测问题。细小裂缝与微灰度差异裂缝的检测有利于道路养护与灾害的防治。而关于细小裂缝的检测以及微灰度差异的检测存在着:人眼识别困难、识别效率低、识别错误率高的问题。
关于细小裂缝的检测以及微灰度差异的裂缝检测的文献比较少。具有代表性的是:张德津提出了一种基于空间聚集特征的沥青路面裂缝检测方法,实现了裂缝区域较为完整的检测。但是试验的裂缝图像噪声特征比较单一,对灰度校正方法的依赖性比较高。细小裂缝的自动检测是道路裂缝检测能大量减少人力、提高检测效率和正确率、更好地防治灾害的关键。
该文提出一种细小裂缝的自动化检测算法,其针对细小裂缝与微灰度差异裂缝的移动平均自适应阈值分割;利用线性结构的连通域规则噪声去除;基于Hough变换的裂缝图形自动检测。最后利用该文方法对实例工程细小裂缝进行自动检测。
2 路面图像的移动平均自适应阈值分割
为了减少光照偏差的影响,此方法是沿着一幅图像的扫描线计算移动平均值。扫描以zigzag模式逐线执行(图1)。
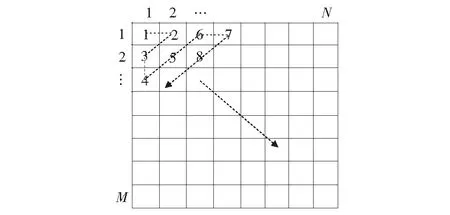
图1 zigzag模式
令Zk为扫描顺序中,第k步时点的灰度。这个新点处的移动平均值(平均灰度)由式(1)给出:
(1)
式中:n为用于计算平均的点数,且M(k)=Zk/n。因为移动平均值在图像中对每一点计算,所以分割用式(2)执行:
(2)
式中:H为[0,1]范围内的常数;Mxy为输入图像在点(x,y)处的移动平均值。移动平均与其他几种常用的全局阈值分割方法的比较见图2。
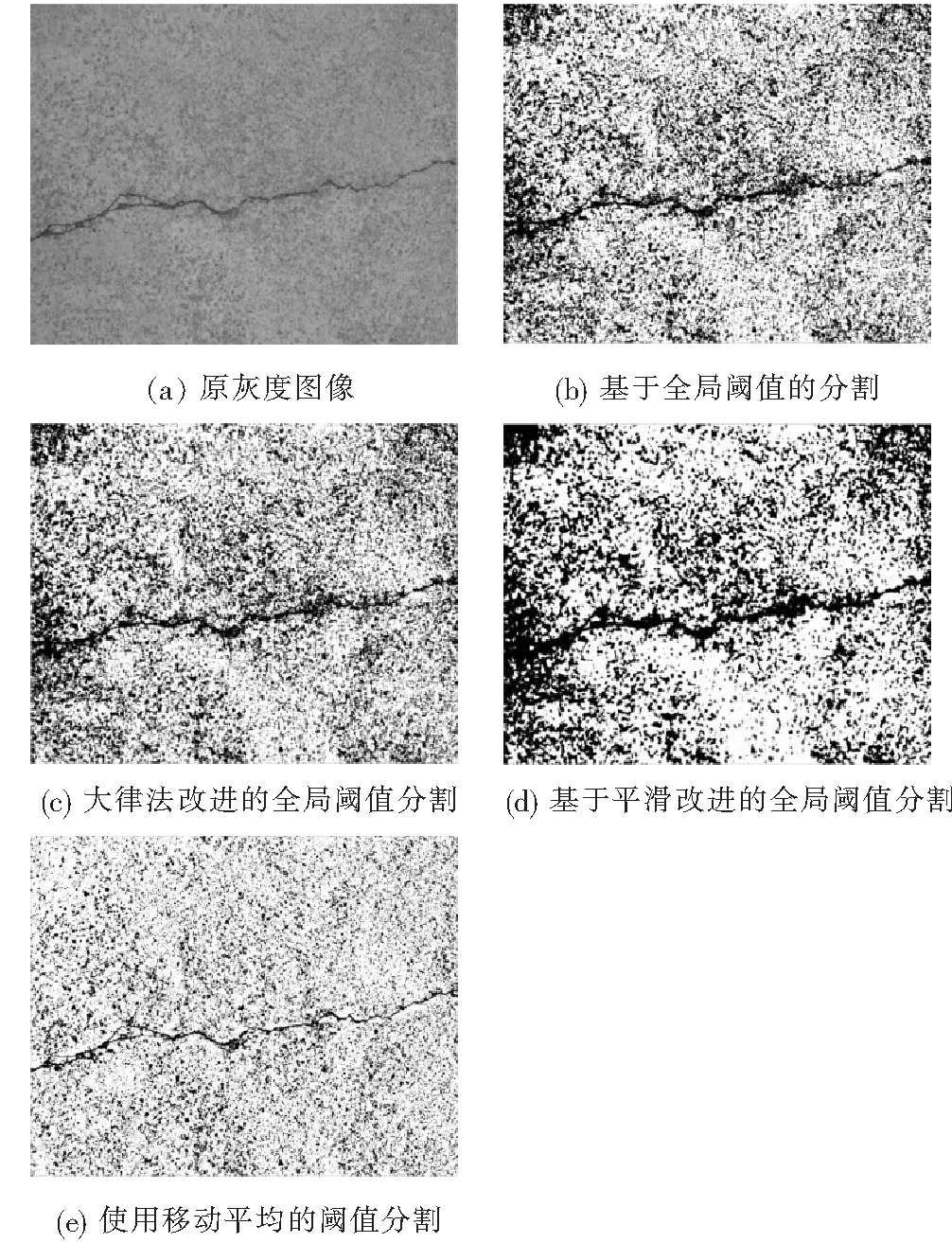
图2 移动平均与几种常用阈值分割方法的比较
由图2可以看出:移动平均的阈值分割方法对道路图像的处理效果较好,噪声相对较小,而且减少了灰度不均对于裂缝提取的影响,有利于后续基于连通域规则的噪声去除。
但是传统的移动平均方法中的阈值H是人为设定的,这样对不同的图像处理的效果不同。该文利用大量高速公路图像进行试验,提出一种自适应阈值的移动平均分割算法,H的确定方法如下:
H=[1-2(Tmean-Tmin)]/1 000
(3)
式中:Tmean为路面图像的路面灰度平均值;Tmin为路面灰度的最小值;由于裂缝在图像中灰度比周围的像素相对较低,现有设备往往受光照不均以及光照变化的影响,得到的图像容易造成过度分割或者欠分割。
在图3中,图3(a)裂缝灰度值与周围灰度值相比来说比较接近,中间部分几乎不相连。用自适应移动平均算法图3(f)与固定阈值的移动平均算法图3(b)~(e)的比较,可以看出自适应阈值的分割能提取完整裂缝信息的同时,噪声相对较小,易去除。与文献[11]中利用频率域子带的粗分割方法相比,该文粗分割算法对于微灰度差异裂缝处理来说具有更好的鲁棒性。与文献[12]的方法相比,灰度不均对该文方法的影响更小。
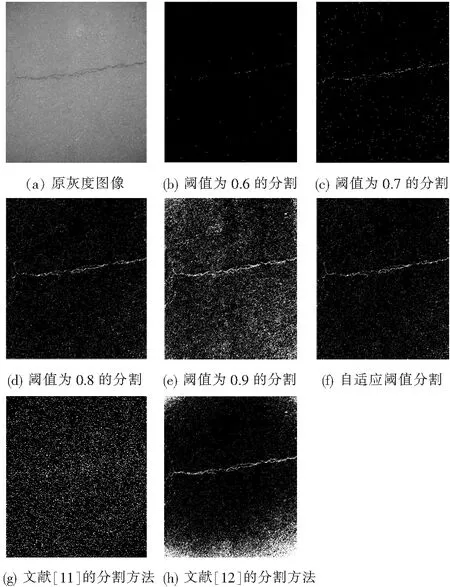
图3 该文方法与不同阈值、其他文献方法效果比较
粗分割的好坏直接影响到整体算法的优劣,并且决定了之后处理算法的复杂难易程度,是算法的核心。该文的粗算法不受灰度不均的影响,能较为完整地提取出裂缝,并且粗分割的二值图像噪声比较细碎贴合实际,有利于分割后处理,减少了运算的复杂程度。
3 基于连通域线性结构规则噪声去除
由于该文上述的粗分割方法会分割出细小而繁多的背景噪声。为了减小运算量,需要对细碎的噪声进行去除:使用连通域标记的方法将相互邻接的图像单元提取出来并标记,然后去除细小的图像单元(图4)。
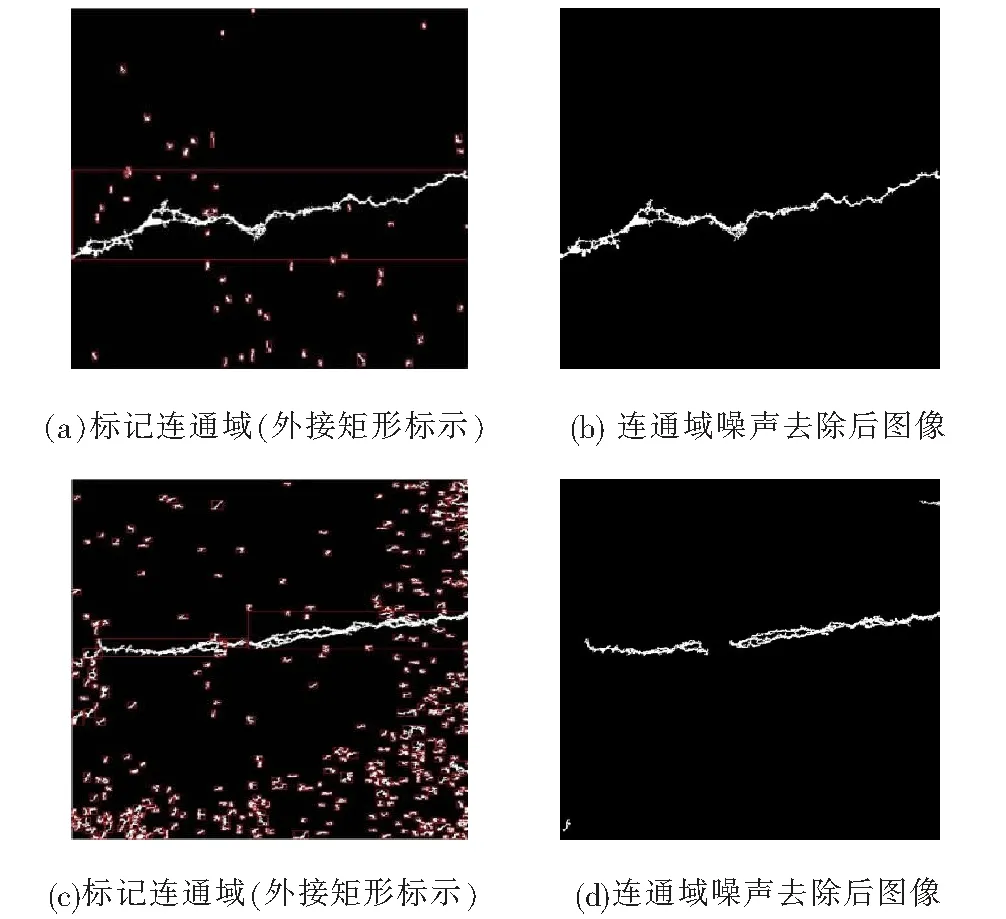
图4 连通域标记去噪结果
连通域规则线性结构去除噪声的算法如下:定义Sct为连通域面积,即该连通域中像素个数;Sce为连通域外接圆面积;Sbx、lm分别为连通域可旋转最小包围矩形面积、较长边长。滤除路面纹理噪声的判别准则为:
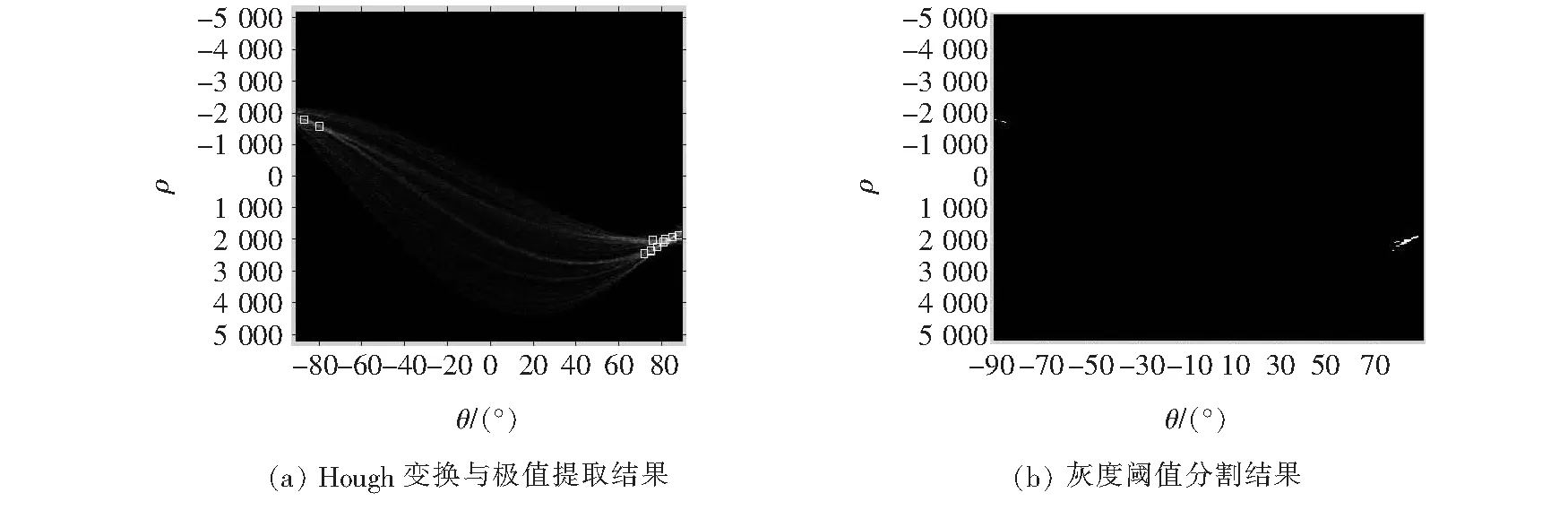
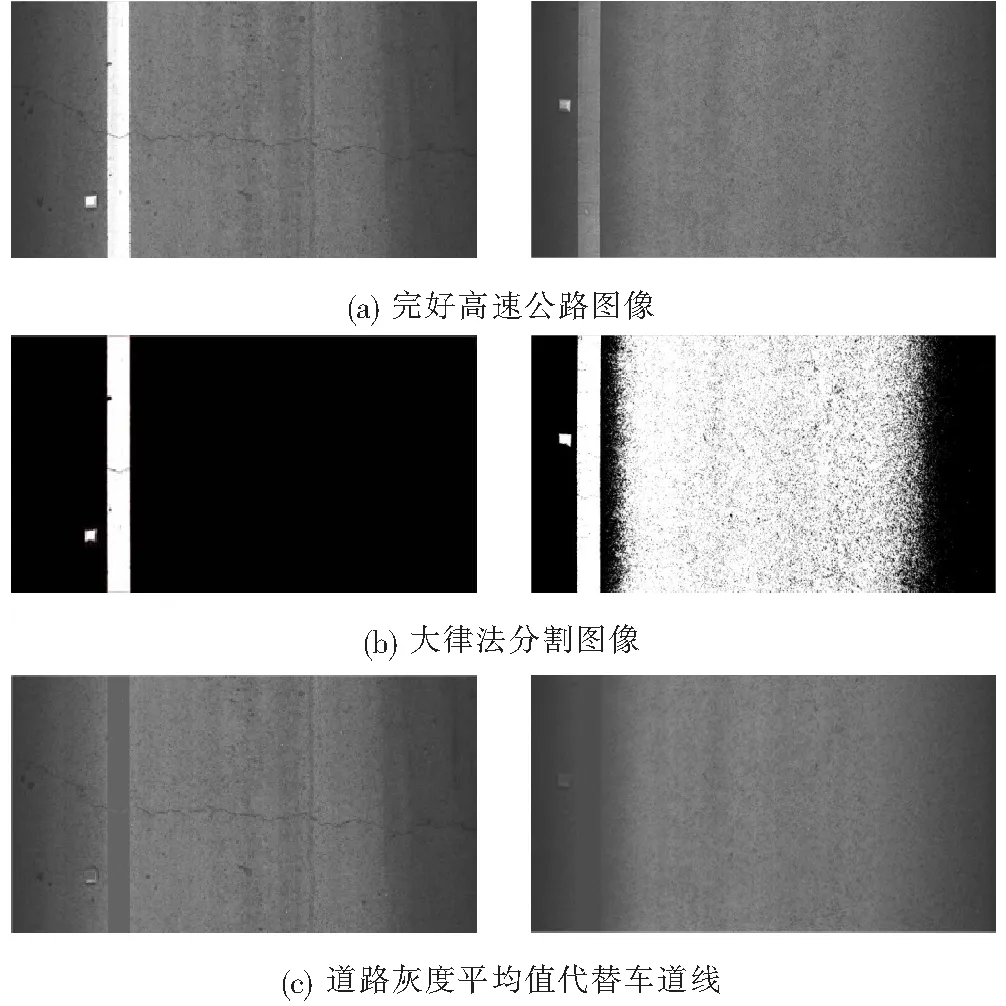
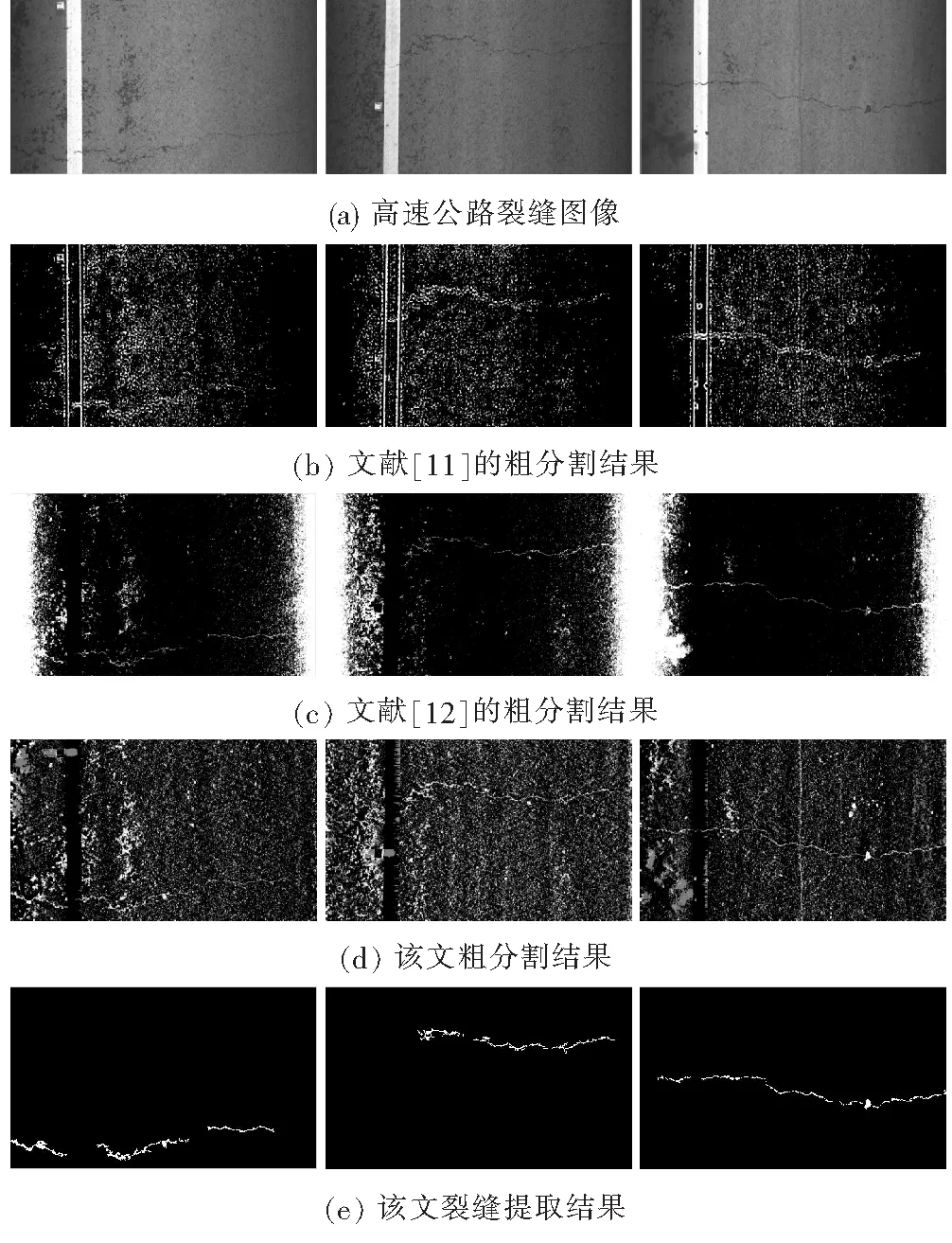
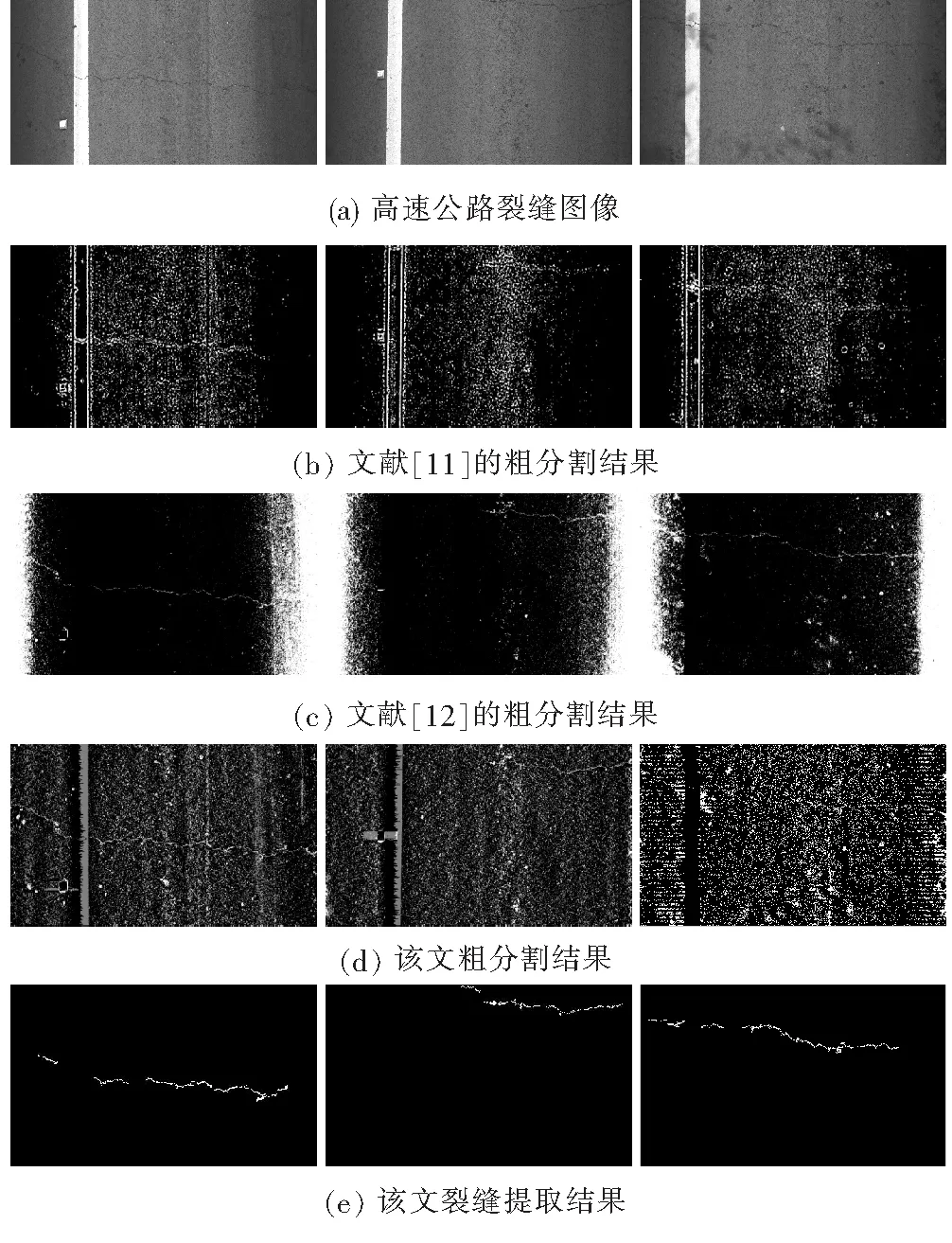
(a)Sct (b)lm (c)Sct/Sce>Tcc 其中:Tc、Tmb和Tcc为预设阈值。(a)为条件一,(b)与(c)的交集为条件二。条件一表明:面积过小连通域图斑被认为是噪声;条件二表明:形状近似圆形的连通域斑块,被认为是噪声。满足以上任意条件即可去除。 Canny算子能够准确地检测到弱边缘,而且噪声对该种办法的干扰较小。由于Canny算子的特点,该文选择Canny算子进行道路裂缝边缘提取(图5)。 图5 Canny边缘提取后结果 Hough变换思想为:在原始图像坐标系下的一个点对应了参数坐标系中的一条直线,同样参数坐标系的一条直线对应了原始坐标系下的一个点。而且,原始坐标系下呈现直线的所有点,它们的斜率和截距是相同的,所以它们在参数坐标系下对应于同一个点。这样在将原始坐标系下的各个点投影到参数坐标系下之后,在参数坐标系下产生了聚集点,这样的聚集点就对应了原始坐标系下的直线。Hough变换根据如下公式: xcosθ+ysinθ=ρ (4) 把x-y平面图像转换为θ-ρ参数平面上的图像矩阵。 由于道路裂缝不可能是完美平滑的直线,所以只能把裂缝当作近似值处理。Hough变换中,当横纵坐标一定时,像点的灰度值大小与此时Hough变换的横纵坐标在二值化图像中代表的直线有关。即此直线上的点越多,在Hough变换中图像点的灰度越大,代表此方向的特征越明显。 当各个方向的灰度小于经验阈值时,说明此道路图像上不具有明显裂缝特征,根据经验阈值二值化Hough变换图像时,不会显现图形;当灰度大于或者等于经验阈值时,说明此道路图像上具有较为明显的裂缝特征。同时,Hough变换域中的灰度值的大小表示图形在该方向上的大小(即是原始图像中裂缝的长短)。在根据经验阈值二值化Hough变换图像时,Hough变换坐标轴内会显示一些白色的点,这些点代表着图像的显著特征。 把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题。也即把检测整体特性转化为检测局部特性。根据Hough变换的原理及特点,该文对Hough变换之后的图形进行极值提取,并对提取值最大的10个具有代表性的极值点,用小窗口表示。此时Hough变换中提取的极值点代表的是该图像中边缘的特征。根据极值点的分布可以分析出道路裂缝的主要走势(图6)。 以此方法就能将裂缝图像和完好路面图像区分。由于路面图像复杂,有时会分割出类似于裂缝的噪声。Hough变换能有效地弥补这一点,在利用Hough变换检测线性边缘时,噪声会以较小的灰度呈现变换域中,以经验阈值分割时会被去掉[图6(b)],留下道路裂缝的主要走势。 图6 Hough变换处理结果展示 该文采用的数据是2014年长寿湖高速公路的道路路面图像。由于长寿湖高速公路投入使用时间较短,及时发现与修补细小裂缝是防治灾害、减少财产损失的关键。 高速公路裂缝的路面情况丰富,有着许多不是裂缝的奇异点,比如道路车道线、水渍等。因此在高速公路的检测中,需要尽可能减少干扰裂缝的奇异点。上述结合移动平均法和连通域规则的去噪方法是一种鲁棒性较好的噪声去除方法,但是在高速公路图像中却受到道路车道线与交通标识线的严重影响,导致不能很好地去除噪声。该文在上述细小裂缝的自动化裂缝检测算法之前加入Otsu′s阈值处理方法,就可以排除车道线的干扰。 Otsu′s方法又名最大类间差方法(大律法),通过统计整个图像的直方图特性来实现全局阈值Ti的自动选取。 运用大律法能将图像中灰度值相对高的区域自动分割的特性,分割出车道白线的区域。同时在原灰度图像中,以背景区域灰度的平均值代替车道白线区域。但是也有出现车道白线与路面灰度相当的情况,此时利用大律法分割之后,根据车道线近似于矩形的特点与路面区分,即是根据连通域与其最小外接矩形的占比区分: Sct/Sbx>Tj (5) 式中:Sct为连通域面积;Sbx为连通域可旋转最小包围矩形面积;Tj为预设阈值,表示当提取部分近似为矩形时,认为此部分为车道白线。并用其他区域的灰度平均值淹没。如图7所示。 图7 车道线去除效果展示 从图7可以看出:高速公路裂缝图像存在以下几个问题:图像四个角灰度比中央低;路面除了车道线还有油渍水渍,以及各种小斑点污渍。该文去噪算法可以在去除噪声的同时,较为完整地提取细小裂缝。同理,对于光照不均而导致图像中央灰度高的图像也可以用此方法去除车道线的干扰。光照不均导致了大律法的过分割,提取了多余的噪声信息。运用该文的方法可以较好地去除车道线。 该文从长寿湖高速公路裂缝检测的工程项目中,选取了6幅包含细小裂缝的代表性道路图像来作为试验应用效果的展示(图8、9)。这6幅原始图像不仅包含了车道线、水渍油渍、树木阴影等噪声;还有着图像灰度不均的干扰。这些干扰都会对细小裂缝的检测产生影响,尤其是对图像粗分割产生的影响最大。从图8、9可以看出: 图8 分割结果对比与试验结果展示(Ⅰ) (1) 文献[11]的方法不适用于细小裂缝的检测,由于高频子带中细小裂缝的系数与背景噪声的系数分布与大小差异小,难以区分开;文献[12]的方法适用于细小裂缝的检测,但是依赖于灰度校正方法;该文的方法粗分割出的裂缝图像:噪声比较小,易去除;受灰度不均的影响小,能相对完整地提取出细小裂缝的信息。 (2) 粗分割方法对于裂缝检测算法的作用极为重要,直接影响到最终裂缝信息的提取。文献[11]与文献[12]由于各自的缺点不能将噪声与细小裂缝区分,而得不到最终的裂缝提取结果。 接下来的步骤就是对裂缝提取结果进行边缘提取与Hough变换检测裂缝。该文利用100幅校园道路裂缝图像,与87幅2014年长寿湖高速公路裂缝图像来验证,分别达到了100%与92%的正确率。试验结果与道路检测车对比,该文方法能分辨灰度与裂缝近似的噪声,减少了误检测的几率。 图9 分割结果对比与试验结果展示(Ⅱ) 该文对近几年的裂缝检测文献中的数据进行分析及总结,从裂缝的噪声与干扰的角度认识道路图像与裂缝特征。在此基础上提出了一种自适应阈值的细小裂缝与微灰度差异的自动检测方法。首先采用移动平均自适应阈值分割对图像进行粗分割;然后利用线性结构的连通域规则对粗分割的细小斑块、阴影与水渍噪声去除;最后基于Hough变换对裂缝图形自动检测。粗分割的好坏直接影响到整体算法的优劣,并且决定了之后处理算法的复杂难易程度,是算法的核心。 该文将此方法与工程单位的实际情况相结合,着重于改善道路裂缝检测车配套软件错误识别率高、细小裂缝检测难的问题,较好地降低了错误识别率的同时,能较好地检测出细小裂缝与微灰度差异图像中的裂缝。 如果说桥梁裂缝检测的难点在于对极为细小裂缝进行检测,那么道路裂缝检测的难点在于噪声与裂缝的区分。虽然该文方法能去除灰度与裂缝近似的噪声,但是局限性在于噪声与裂缝相连的情况:没有办法去除噪声的同时留下完整的裂缝。在未来的研究中,将从多特征角度研究噪声与裂缝,结合各种特征检测方法中裂缝与噪声表现的异同,进一步提高裂缝检测的正确率与裂缝提取的完整性。4 道路裂缝边缘提取
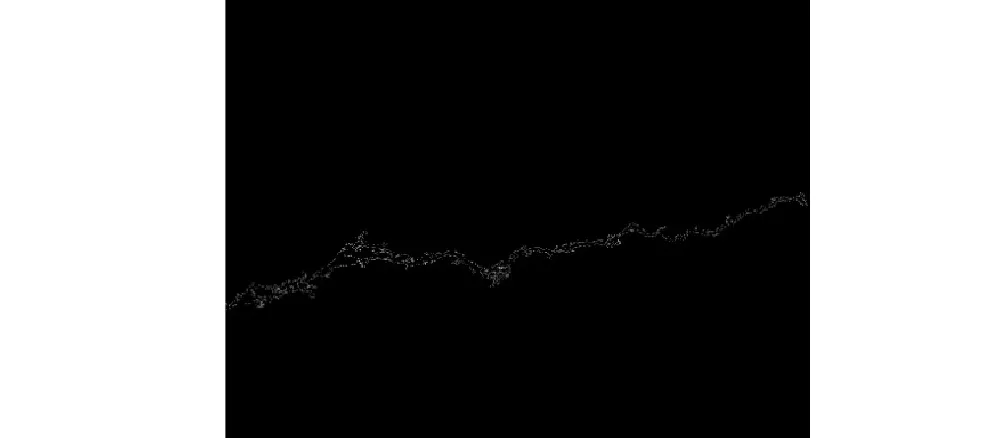
5 利用Hough变换检测裂缝
5.1 Hough变换原理
5.2 Hough变换自动化检测道路裂缝
6 试验结果与分析
6.1 高速公路道路标线的去除方法
6.2 检测效果展示
7 结语
