基于LSTM的共享单车需求预测
2019-04-12李颖宏
李颖宏 马 勇
(北方工业大学城市道路交通智能控制技术北京市重点实验室,北京 100043)
随着绿色出行和环保观念的深入人心,共享单车自推出以来不仅深受用户喜爱,也减轻了城市路网压力和拥堵情况,方便了“最后一公里”的出行。共享单车进入城市的一年多时间里,发展速度极快。随着使用单车的用户增多,共享单车企业投放车辆数量也是与日俱增。然而,一味地增大投放量,在增强城市交通服务能力方面并未成正比性,反而带来了一系列令人质疑的问题,其中乱停乱放、高峰期一车难求尤为严重,这些存在的问题如何运用高效科学的方法去解决已成为一个关于共享单车的热门话题。
针对这些问题,国内各共享单车企业对共享单车系统的研究主要可以归纳以下几个方面:(1)预测研究,如摩拜使用深度学习方法对供需进行预测,具体将Tensorflow框架下的卷积神经网络应用于单车流量预测;(2)智能调度研究,如摩拜的红包单车,通过综合运用物联网、云计算和大数据,对单车实现实时状态的精确控制,发现单车“黑洞”,以贴红包的方式,激发用户自觉自行,让单车离开“黑洞”,回到需要单车的地方;(3)智能站点设立的研究,如“摩拜智能推荐停车点”,该停车点可实现亚米级定位,实时掌握停车区域内单车的数量、状态、位置及各区间的流量情况等信息,为车辆投放、调度和运维提供智能指引。
共享单车的需求预测是一个共享需求比较新的问题。陈昕昀[1]等利用BP神经网络对公共自行车单站点调度需求量进行预测研究,发现了自行车流量随时间分布的规律;Borgnat[3]等使用里昂自行车共享系统的历史数据,通过组合模型来预测一天每小时的需求量;近来有很多学者将机器
学习的方法运用到预测需求量[4-5]。以上这些方法几乎都局限于有桩式公共自行车的研究,而针对无桩式的共享单车,目前涉及成型的理论及方法并不多,并且针对有桩式公共自行车的需求预测方法往往具有局限性,不能兼顾出行的空间和非空间属性。
本文使用一种序列化的神经网络模型,该模型在解决梯度爆炸和梯度消失的基础上,能够提取共享单车出行OD序列间的依赖信息,即流量的时间变化规律,建立基于LSTM的线性回归预测模型。其次,针对不同地域间出行的自流动性和关联性,在提出的预测模型基础上,将轨迹数据中挖掘的距离特征纳入预测模型,以时空的角度来描述各个出行区域之间的相互影响,利用摩拜公司30多万条单车轨迹数据,通过划分不同的特征数据集,训练模型,并验证了该模型在共享单车需求预测方面的优越性。
1 LSTM算法
长短期记忆网络(Long-Short Term Memory,LSTM),由 Sepp Hochreiter和Jürgen Schmidhuber于1997年提出的,是一种特定形式的循环神经网络。LSTM通过增加门操作,即输入门、遗忘门、输出门,优化了自循环的权重,保持权重的动态变化性,在模型参数固定的情况下,在一定程度上解决了梯度消失或者梯度膨胀的问题。
1.1 LSTM模型
LSTM模型结构定义如图1所示,它包含三个门操作,控制和保护每一个元胞的状态。该操作既能够丢弃低状态数据,又能够向状态中加入新的数据。
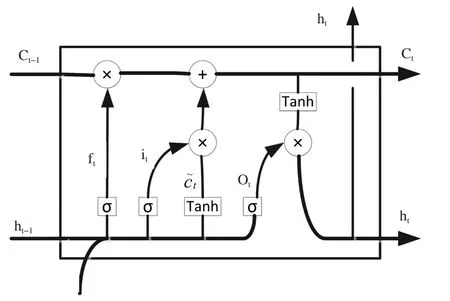
图1 LSTM原理结构图
1.2 LSTM的向前传播
由模型的结构图可知,LSTM实现了三个门计算,即遗忘门、输入门和输出门。遗忘门处理的数据是上个样本的短期记忆和本次样本的输入,通过Sigmoid函数决定保留多少上一时刻的单元状态到当前时刻的单元状态;输入门决定如何将新信息和旧信息相结合,嵌入到新的状态;输出门决定当前时刻的单元状态有多少输出。每个LSTM包含了三个输入,即上时刻的单元状态、上时刻的LSTM的输出和当前时刻输入。LSTM向前传播机制如下:
遗忘门:

式中:[]—两个向量相连合并;
Wf—遗忘门的权重矩阵;
σ—sigmoid函数;
bf—遗忘门的偏置项。
输入门:

第一部分是上一步得到的过滤后的长期状态信息,第二部分是根据上个元胞的和本元胞的输入获得的更新信息。当前时刻的单元状态由遗忘门输入和上一时刻状态的积加上输入门两部分的积,即:

输出门:

输入结合本次和上次的短期状态信息,获取新的信息,再点乘长期记忆的状态通过tanh函数正规化得到输出。
2 预测模型的构建
共享单车作为一种短距离出行工具,在复杂的城市交通网络中,已经成为城市“慢交通”系统的一部分。相对于机动车流量的动态特性,共享单车流量有其独特的自流动特性,使得某些骑行区域点之间具有一定的关联性,某一骑行域的共享单车预测需求量不仅与自身历史时刻流量相关,而且与该区域有直接或者间接流量流动的区域相关。若预测模型仅考虑目标区域在历史与未来时间间隔内单车流量的相关性,而忽略其相关区域的流量状况,将不可避免地降低预测准确性。因此,建立如图2的预测模型框架。
首先 ,将单车轨迹数据按照各区块出行时间划分成日内单车流量时间序列;然后利用K-means聚类算法,以与预测区域有直接或者间接流量流动为依据,进行聚类划分,得到日内相关区块单车流量时间序列,输入到LSTM神经网络模型,找出时空特性规律;最后利用线性回归预测模型得到预测值。
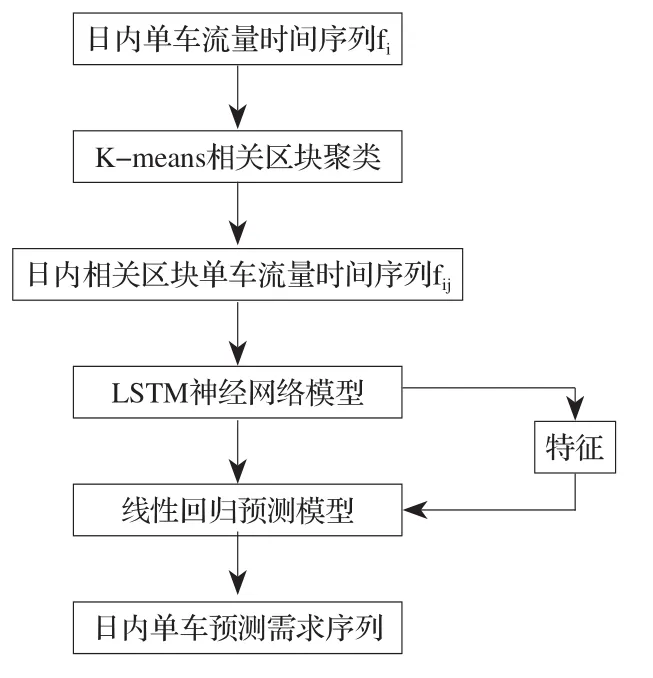
图2 基于LSTM的预测模型图
2.1 K-means聚类
本文所用到的部分专业术语定义如下:
n:区域数;
Si:第i个区域 ;
Sij:与i区域相关的j区域;
fSit:t时刻Si区域的单车出行需求流量;
fSijt:t时刻j区域到i区域的单车流量;
Lm:第m条历史出行轨迹。
某一区域共享单车出行流量在受该区域位置影响的同时,也与其相关区域的单车出行规律相关。本文基于各区域历史出行轨迹信息及出行规律,得到共享单车流量,以及本区域的单车需求量,提出了二次K-means算法,得到与预测区域直接相关的区域簇。第一次先按区域的地理位置进行聚类,得到区域簇,第二次从得到的N个区域中按轨迹信息得到与预测区域Si相关的区域S1,S2,S3,...,Sn。
K-means聚类算法如下:
输出 :Si:S1,S2,S3,...,Sn。
(2)初始化k=0;
(3)while k < K do ;
(4)for i = 1:n do;
(6)k = k+1;
(8)for j = 1:N do;
(9)Sij包含于Lij;
(10)更新Si:S1,S2,S3,...,Sn;
(11)返回Si:S1,S2,S3,...,Sn。
2.2 LSTM神经网络模型
LSTM在循环神经网络RNN结构上增加了各层的门限节点:遗忘门、输入门、输出门。通过调节门限的打开或关闭,判断模型各层网络的长时间记忆状态在该层的输出结果是否加入当前层的计算中,从而实现模型的记忆功能。本文基于LSTM神经网络模型的特性,对提出的线性网络预测模型进行训练优化,搭建三层单胞神经网络模型如图3所示。

图3 三层LSTM神经网络模型图
该模型的计算方式与传统的BP神经网络相似,结合结构图1,根据式ot=σ(Wo×[ht-1,xt]+bo)和ht=ot×tanh(ct)可进行计算。模型的训练步骤如下:
(1)数据样本的准备。经过数据预处理得到的共享单车出行数据,通过K-means聚类得到关联的出行规律样本数据集作为模型的数据输入。
(2)网络参数的初始化。使用python的keras库,完成训练参数的调整,具体参数包括最大迭代次数、学习率、激活函数等。
(3)网络模型的训练。采用BPTT(back-propagation through time)训练算法,进行梯度检测,使用随机梯度下降算法(SGD)更新权重,一直到满足最小误差函数需求为止。
(4)网络模型的测试。训练过程如图4所示。

图4 LSTM模型训练图
2.3 线性网络预测模型
基于上节二次聚类得到的区域簇S1,S2,S3,...,Sn,本节将各区域点之间的复杂网络关系简化为一个结构图,如图5所示。预测区域Si,其他区域为Si的相关区域点,Vin为特定时刻相关区域Sn点到Si区域点的车流量。

图5 网络模型预测结构
本研究模型是通过将特定时间间隔的车流量以及相关的权重线性组合,得到预测区域的表达式,如式(7)所示:

本文建立的单一线性预测网络模型的均方根误差都随着预测时间间隔的增加而增加,时间间隔越长,对时间特性的学习能力越弱,不确定因素影响就越大,导致预测的均方根误差就越大,因此,本文采用一种时间特性学习模型LSTM(Long short-term memory)对轨迹数据中隐藏的出行时间规律进行训练学习,将长时间间隔内流量的流动特性纳入预测模型中,提高预测模型的准确性与精度。
3 实验结果与分析
3.1 数据描述
本文基于300万摩拜共享单车用户出行记录数据,进行预处理后作为实验数据验证模型的有效性与准确性。数据是连续两周用户出行记录,经过数据的规则预处理及样本筛选,构建数据集。数据信息如表1所示。

表1 用户单车出行轨迹数据表
3.2 评价标准
本文采用均方根误差(RMLSE)率作为评价标准来评价模型的有效性。

3.3 结果分析
利用综上数据与评价指标,对预测结果与模型的有效性和准确性进行分析。
3.3.1 聚类结果分析
在本文的实验中,使用k-means聚类对出行轨迹数据进行聚类,得到了部分出行轨迹相关簇,如图6所示。可以看出,单车出行在一定距离之间出行的相关性。
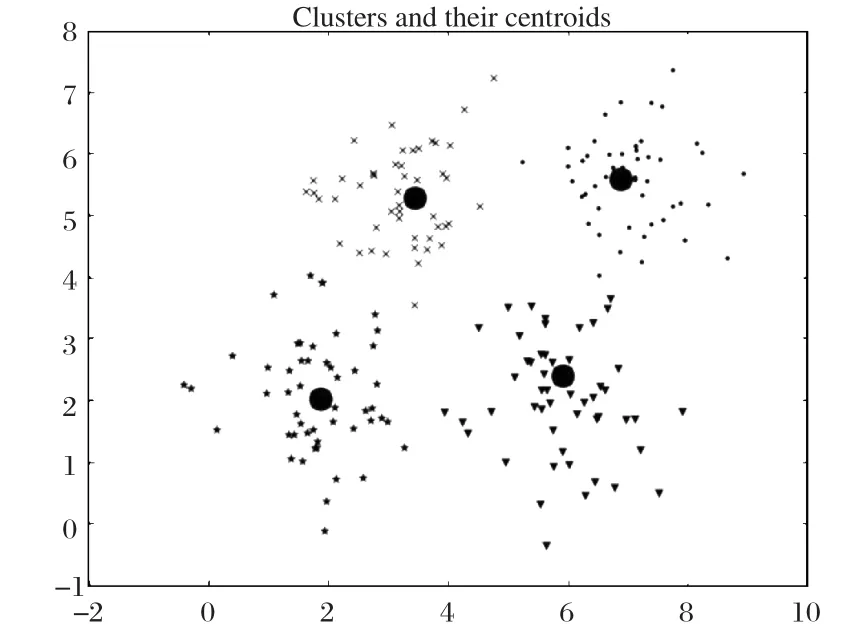
图6 K-means聚类
3.3.2 预测结果分析
选取簇点较密集和较稀疏的区域点,图7为两个区域在单一网络模型下不同时间间隔的RMLSE的变化,由图7可知,聚类簇点越密集,相关站点越多,预测结果越准确,相反,簇点稀疏,相关站点越少,使得可依据的出行历史数据较少,预测精度降低。无论簇点密集与否,随着时间间隔的增加,RMLSE也呈现增加趋势,因为不确定因素的增多,使得预测误差也越大。
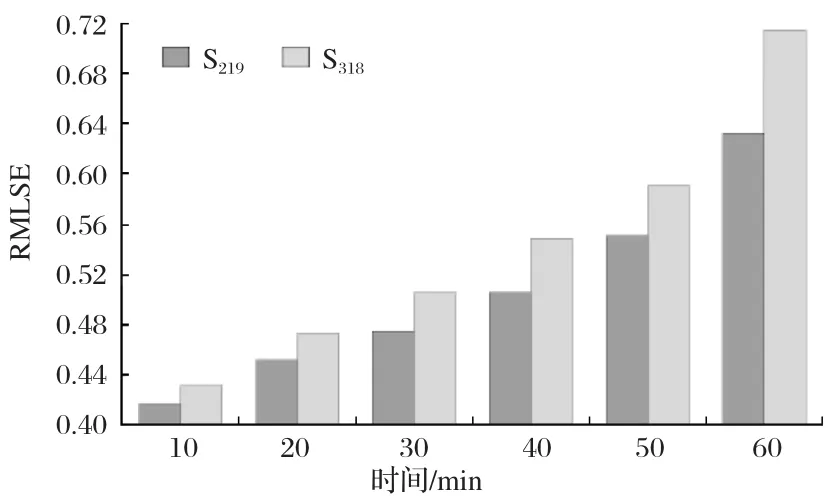
图7 无LSTM模型下的线网络预测误差
图8 为通过LSTM提取长时间数据特征之后,将长时间特性纳入网络预测模型,选取上述簇点,得到RMLSE随时间间隔的变化规律。

图8 LSTM模型下的线性网络预测误差
由图8可知,随着时间间隔的增加,预测的RMLSE明显有所下降,预测准确性得到一定的提升。
3.3.3 预测方法比较
为了验证LSTM网络对长时间特性的学习测特性,本文选取循环神经网RNN和支持向量机SVM进行比较,如图9所示,本文的最终预测精度要高于其他两种模型,并且能更快地收敛。
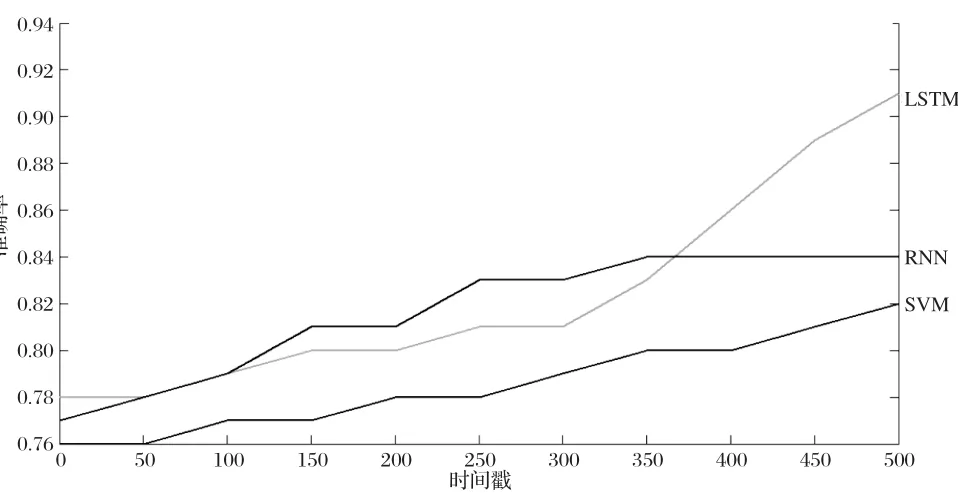
图9 预测模型效果比较图
4 结语
本文在已建立的网络模型的基础上,利用LSTM网络对长时间间隔的历史数据的学习特性,降低了网络预测模型对长时间间隔数据的敏感性,提升了预测的准确性;通过与已有预测方法的比较,证实了该改进模型的实用性及有效性,并在一定程度上对预测的精度得到提升,预测误差率仅为0.293。基于共享单车轨迹数据,对其需求的预测,未来将考虑更多因素如出行规律、工作日、天气等来改进模型。
