基于PLC技术的柿饼分拣系统研究
2019-04-11卢丹萍黄明恒
◎卢丹萍 黄明恒
(广西职业技术学院 机电与信息工程学院 530226)

1 引言
柿饼肉质柔软、清甜芳香、营养价值高,受人们的喜爱。广西现已成为国内柿饼产量最高的省区。柿饼具有一定的贮藏保鲜期,因此柿饼晾晒完成之后需快速的根据它的品相进行分级分类,然后投放市场。传统的柿饼分拣由人工根据大小、色泽、挂霜多少分成不同的等级,这种方式存在着生产效率低、标准不统一、容易引入污染等问题。
本文研究一种基于机器视觉技术的柿饼分拣系统。机器视觉技术是指用摄像机和计算机来模拟人类的视觉功能。通过工业相机获取传送带上柿饼的图像,提取出图像中的柿饼信息,如形状、尺寸、色泽、表面特性等,然后控制机械手完成分栋动作。
2 系统方案
系统框架如图1所示。系统由PLC、变频器、传送带、视觉传感器和拾取机构组成。PLC是系统核心,控制各部分协调工作。变频器控制传送带以一定的速度稳定工作,带动期中的待检柿饼匀速通过视觉传感器识别区域,和拾取机构工作区域。视觉传感器完成柿饼图像的采集和跟踪分析,并把信号传输给PLC。拾取机构根据PLC的指令完成柿饼的吸取,并根据不同的分类放入对应的收集箱[1]。
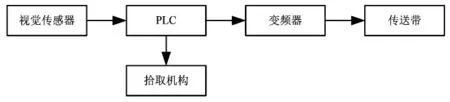
图1 系统框架
2.1 PLC
本设计中,PLC采用中达优控的S-20MR-430-B型,具有12点输入和16点输出,2两路AD以及2路DA。其最大的特点是它由MD430彩色文本显示器与兼容S7-200系列PLC结合在一起的一体机。处理器为A8(80MHz的RISC),DC24V供电,8000步程序容量,8000个存储器。支持日历时钟,掉电无需电池备电。完全满足本系统的需求。
2.2 视觉传感器
视觉单元采用欧姆龙FH-1050工业视觉系统主机与高速工业相机组合。训练阶段相机采集传送带不同类型柿饼的视频图像。把柿饼分为优质、一般、不合格三大类。编写脚本并设置容错阀值之后,视机可柿饼3种不同类型的柿饼,并给出识别结果。同时,根据拍摄的图像的时间点确定各个柿饼坐标并传送给PLC,以便拾取装置在合适的时刻工作[2]。
2.3 变频器
变频器采用西门子3210-5BB21-1UV0型,220V供电,功率1100W。该变频器无需调试软件,通过简单的参数设定即可实现预定功能。直观的LED面板显示,可以方便地应用于本系统的传送带驱动。PLC可通过IO信号实现对该变频器的启停控制[3]。
2.4 拾取机构
拾取机构为一个二维平面内的机械装置,抓手末端为吸盘式设计,如图2所示。传送带两侧分别为合格品收集箱和优等品收集箱,拾取机构安装与两个收集箱计传送带正上方。抓手可在横梁上来回移动,同时也可以上下移动来吸取柿饼和释放柿饼。拾取机构在两个方向上的运动由2个步进电机控制。根据PLC的控制信号完成合格品及优等品的分拣。剩余部分为不合格品,在传送带末端自动掉入不合格品收集箱[4]。
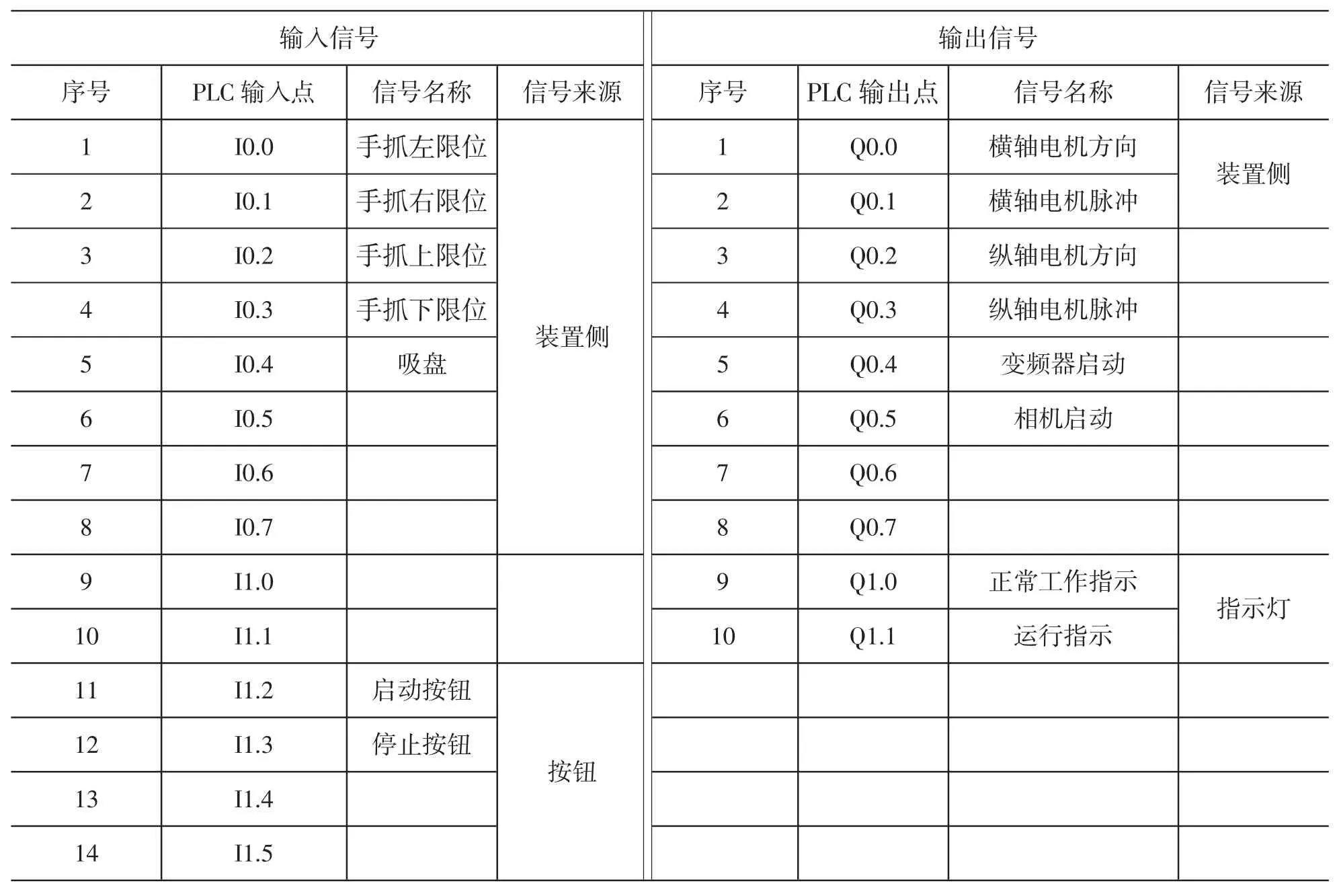
表1 I/O信号表
3 程序设计及优化
本系统的程序包括变频器驱动、相机信号读取、柿饼运动坐标计算、拾取路径优化、步进电机驱动。启动变频器之后,电机带动传送带运行,传送带上的柿饼经过相机区域时,相机拍下图像并完成识别坐标定位等工作。当拾取区域出现柿饼时,根据标记的结果进行拾取及分拣工序。拾取机构由PLC控制的两个步进电机带动。步进电机驱动器得到控制信号之后会驱动两个轴向的步进电机正反转及加减速,从而到达指定位置吸取或者释放柿饼[5]。
本程序的难点是运动目标追踪。目标跟踪是指对图像序列中的柿饼进行检测,提取,识别,并获得各个柿饼的位置数据,并预测运动轨迹。对于本项目所研究的柿饼分拣系统,柿饼会源源不断的进入相机的视野,系统对每个目标进行识别、检测等程序并记录结果。因此就必须确保结果与目标的正确对应,不能将柿饼A的处理结果记到柿饼B上。
4 结语
实验表明,本系能够根据预置的参数,实现柿饼的分拣。具有较高的准确度及生产效率。在后续的研究中,应着眼于分拣之后的装箱打包及仓储过程的自动化控制。本系统的实现,对于农产品加工环节的自动化控制具有一定的借鉴作用,具有较大的推广价值。
