质子医疗加速器引出参考点束流诊断系统的设计与实现
2019-04-11连欢丁开忠吴昱城陈永华李君君李晗
连欢 ,丁开忠,吴昱城,陈永华,李君君,李晗
0 引言
合肥中科离子医学技术装备有限公司与中国科学院等离子体物理研究所共同研发的质子医疗超导回旋加速器SC200,利用超导技术可实现在小励磁功率下产生强大的约束磁场,降低加速器的功率消耗,使超导加速器在经济上和技术上具有巨大的优越性。作为质子治疗系统的核心部件,加速器引出质子束流的质量直接影响整套质子治疗系统的性能。因此加速器本身性能参数的验收尤为重要。
在加速器束流引出管道上连接探针设备进行参数测量。传统加速器大多采用BPM及多丝靶检测束流位置与轮廓,采用法拉第筒或束流变压器检测束流流强。为更清晰直观明确引出束流状态,本文论述一种在引出参考点通过荧光靶采集图像并处理获取束团位置及截面尺寸,通过法拉第筒实现精确束流流强的检测的设计。该束流诊断系统采集的数据为加速器调试及整体验收提供有效依据[1]。
1 系统概述
引出参考点束测系统主要包括荧光靶及法拉第筒,其结构如图1所示。荧光靶与法拉第筒探针垂直插入束流腔,通过驱动气缸带动探针伸缩运动。荧光靶通过工业级高清CCD相机采集标有1 mm刻度网格的靶片上的束斑图像信息,经过拟合处理可输出束斑位置与轮廓信息[2]。法拉第筒采用高精度皮安表,可实现1~400 nA束流流强2.5级高精度标准的检测。

图1 束测系统结构示意图Fig.1 Structure of beam diagnostic system
2 传动控制与通讯
引出参考点束测系统控制架构如图2所示。荧光靶与法拉第筒的传动控制主要基于PLC可编程控制器,采用相同的运动控制模式[3]。PLC控制继电器指令电磁阀实现驱动气缸带动探针进行伸缩运动,上下限位器可反馈探针当前位置状态。对急停按键设置最高权限,保证在急停按钮锁定时,荧光靶与法拉第筒探针均保持收缩状态,CCD相机断电,以便当束测过程中遇到突发状况时对探针系统进行保护。此外,CCD图像传感器的上断电也由PLC通过继电器及电磁阀进行控制,CCD图像传感器可反馈给PLC其当前上电状态。

图2 控制架构图Fig.2 Control architecture diagram
上位机的控制软件基于LabVIEW 2015开发,通过NI OPCServers对PLC标签创建关联共享变量,实现PLC与上位机间的相互通讯[4]。通过LabVIEW虚拟按键可实现PLC气动传动、CCD图像传感器上断电等指令的实时输出,并可通过PLC检测到的上下限位器信号、CCD图像传感器状态信号反馈到LabVIEW界面显示当前探针位置状态及CCD图像传感器上电状态。PC端通过TCP/IP协议连接至CCD图像传感器,并通过LabVIEW逻辑程序对图像信息进行处理、显示、拟合与分析。PC端通过RS232串口协议连接至6485型皮安表,可实现皮安表的远程控制及数据读取。引出参考点束测系统界面如图3所示。

图3 引出参考点束测系统界面Fig.3 Interface of the extraction reference point beam diagnostic system
3 荧光靶
荧光靶是基于光学的束流位置及截面尺寸的拦截式测量设备。荧光靶主要由图像采集系统及传动系统构成。图像采集系统主要包括荧光靶头、观察窗及固定在观察窗上端的CCD图像传感器。传动装置主要包括驱动气缸、电磁阀、传动档、上限位器、下限位器及波纹管。荧光靶结构如图4所示。

图4 荧光靶结构示意图Fig.4 Structure of scintillation screen device
在荧光靶图像测量系统中,荧光靶头平时为收缩状态,不会阻挡束流的传输,在调束过程中通过气动传动装置将荧光靶头推至束流腔中。为了保证观察到的亮斑与实际亮斑不发生形变,荧光靶与束流中心线夹角为45o。束流轰击靶片产生的光斑通过观察窗由CCD图像传感器接收,两者间距保持固定,连接杆处采用动密封。通过电磁阀控制驱动气缸带动荧光靶头上下移动,传动档触发上、下限位器可反馈当前荧光靶位置信息。位置信息及图像信号传至PC端LabVIEW虚拟机进行数据采集及处理。
荧光靶头材料采用搀杂0.6%Cr2O3的Al2O3陶瓷材料,当荧光靶靶头中原子的轨道电子从入射粒子接受大于其禁带宽度的能量时,被激发跃迁至导带,再经过一系列物理过程回到基态,该过程中会产生波长为700 nm可见荧光,从而实现束斑信息的检测[5]。荧光靶片采用石墨烤制技术刻有间距5 mm的网格,并在中轴线标刻间隔1 mm刻度,以便于对采集到的束斑信息进行位置及轮廓尺寸的标定。荧光靶头结构如图5所示。

图5 荧光靶头照片Fig.5 Photo of scintillation screen
采用LabVIEW虚拟机的Vision Acquisition模块对CCD图像传感器采集到的图像信号进行获取。为了更好地对得到的图像信息进行处理,将图像信号转换为一个8 bit灰度表示的1 280×960的二维数组,其数值表示图像在对应位置的亮度,反映了CCD上束斑形状的分布。由于光路本身及其他杂散光的影响,在数据处理前必须先进行本底处理。截取无束斑条件下CCD图像传感器采集到光强二维数组作为本底噪声,对数据分析的每组二维数组与本底噪声二维数组做减法处理,即可得到较为理想的光斑图像数据。束斑图像满足二维的高斯分布:

式中,f为光强;A为常数;σx、σy为束斑在x、y方向上的轮廓尺寸;μ、ν为中心位置的x、y方向坐标;k为x、y方向的耦合系数。
对式(1)分别进行x、y方向的积分,即可分别得到x、y方向的分布:

对去底噪的二维数组分别在x、y方向进行积分,即可得到光强在水平和竖直方向的一维分布。通过使用LabVIEW高斯曲线拟合VI分别对x,y方向的一维数据进行拟合,即可得到束斑水平中心位置μ、水平轮廓尺寸σx、竖直中心位置ν、竖直轮廓尺寸σy等关键参数[6-7]。
荧光靶图像采集与处理系统分别设置CCD图像、2D效果、3D效果界面对所需束团信息进行多方面分析。CCD图像界面将CCD图像传感器采集到的图像信息直接进行显示。2D效果界面将转换后二维数组以光强图的形式显示,水平拟合曲线及竖直拟合曲线通过高斯拟合计算出μ、σx、ν、σy等关键信息。3D拟合界面将光斑实时投放到三维界面进行全方位的分析,通过鼠标拖动可实现三维图像全角度的观测,进而更加全面地了解和分析束斑位置、光强分布、束斑轮廓尺寸等关键信息。
图6为对同一束斑CCD图像、2D效果、3D效果的对比。通过对比图可观察到,CCD传感器直接成像可清晰观测到束斑轮廓及位置等信息,但由于CCD相机自身及环境噪声干扰,该图像反馈参数与实际束斑参数仍存在一定偏差。通过2D效果亮度图调节光亮度可清晰观察到荧光靶刻度,但由于光强范围降低,造成光斑成像轮廓放大,水平/竖直拟合曲线对此进行了弥补。3D效果图可实时显示当前束流状态,通过拖拽鼠标调节3D成像角度可全面多角度显示光强分布,增强对当前束团位置、轮廓及光强分布方面信息的了解。

图6 CCD图像、2D效果、3D效果对比Fig.6 Comparison of CCD image, 2D fitting, 3D fitting
4 法拉第筒
法拉第筒是束流流强精准检测的拦截式测量设备[5]。法拉第筒主要由流强检测系统、水冷系统及传动系统组成。流强检测系统主要包括收集极、抑制极及皮安表。水冷系统通过一进一出水冷铜管连至收集极以实现束流轰击收集极过程中热量的转移。传动装置主要包括驱动气缸、电磁阀、传动档、上限位器、下限位器及波纹管。法拉第筒具体结构如图7所示。
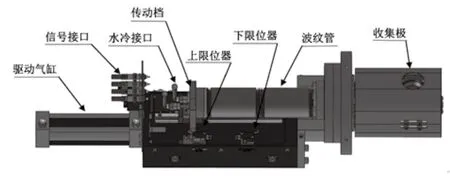
图7 法拉第筒结构示意图Fig.7 Structure of Faraday cup device
在法拉第筒流强检测系统中,收集极平时为收缩状态,不会阻挡束流的传输,在调束过程中通过气动传动装置将收集极推至束流腔中。通过电磁阀控制驱动气缸带动法拉第筒收集极上下移动,传动档触发上、下限位器可反馈当前收集极位置信息。位置信息传至PC端LabVIEW虚拟机进行数据采集及处理。
法拉第筒收集极呈圆筒状,如图8所示,通过阻挡带电粒子并测量积累电荷实现束流流强的检测。质子束流轰击到靶材料时会发生电离产生电子-离子对,产生的二次电子容易脱离原子束缚逃逸,剩余电荷会对检测信号造成影响。故在收集极外缘安装环状抑制极,通过加载负高压产生强电场,可有效抑制二次电子逃逸,保证流强检测精度。收集极底侧采用圆锥结构,内侧环绕水冷铜管,可有效增强拦截高功率束流过程中的散热[5,9]。

图8 法拉第筒收集极结构Fig.8 Photo of Faraday cup

图9 流强检测结果Fig.9 Result of current intensity measurement
SC200医用加速器引出束流理论流强范围为1 nA~400 nA,选用Keithley 6485型皮安表作为法拉第筒电子学,通过LabVIEW虚拟机对其进行SCPI命令远程操控及实时数据读取。当前选用KEYSIGHT B2962A电流源对流强检测系统进行测试。通过电流源输出400 nA到0.1 nA电流信号进行测试,皮安表设置为自动量程模式,为检测设备在稳定状态下的表现,设置labVIEW数据读取频率为2 Hz,记录采样100个点的数据,求取数据平均值I_mes并计算检测平均值I_mes与输入电流I_ref的偏差ΔI。测试结果如图9所示。图中虚线为2.5级精度标准,即以当前输入电流值为量程条件下取该量程2.5%作为精度标准,点实线为检测流强的偏差,由此可知,当前测试结果满足2.5级精度标准。
5 结论
引出参考点束流检测系统用于加速器主机引出束流的检测,为加速器主机调试及验收提供参数依据,是保证质子医疗束流质量的重要测试系统。基于LabVIEW虚拟机及PLC可编程控制器进行远程控制及数据采集与处理的法拉第筒及荧光靶束测设备,可在线完成束流流强、束团位置及截面尺寸等关键参数的采集与处理,大大提高了束测工作的效率与准确性,保证束测工作顺利完成。
