利用轨道动力平车作业的联锁进路控制系统
2019-04-08陈安观
陈安观
(中铁武汉勘察设计研究院有限公司,武汉 430074)
1 概述
2 系统方案
为适应集装箱水铁联运在铁路港湾站与各港口码头铁路集装箱场(港区、货区)运输方式的特点,解决集装箱轨道动力平车(车组)进路控制的问题,本方案在基于集装箱动力平车中转倒装作业方式下提出一种新型的铁路集装箱货场进路控制系统,该系统为单元式区域联锁控制系统,适合一个铁路港湾站对应一个或多个集装箱货区(港区)情况下的集装箱装卸中转作业,也可以用于其他集装箱动力车辆中转倒装作业方式。举例示意如图1 所示。
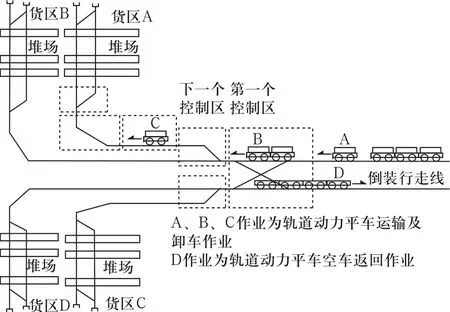
图1 举例示意图Fig.1 Example diagram
本系统将车站(车场、货场等)内轨道动力平车走行及作业区域,按照站场形状和平行作业进路,划分为若干个相互连接具有平行作业或能够独立运行的联锁进路控制区域。并将其定义为“单元联锁控制区”(简称控制区)。
控制区根据作业区内正在执行作业的车辆(组)状态信息及位置关系,结合联锁进路关系,再通过计算机,自动生成允许车辆运行限制速度、运行距离长度的运行许可,指定轨道动力平车(组)根据该运行许可运行,并能够保证车辆在允许走行长度的终点位置停车。当前车辆位置与进路允许停车位置的距离-速度关系定义为联锁进路TA 运行许可(简称TA 许可)。
在轨道动力平车(车组)作业控制区内,不设置地面信号,由车辆(组)作为作业执行发起者,向进路控制中心无线发送始端、终端进路运行请求,进路控制中心选择最佳进路后,同意进路请求。车辆(组)获得进路同意,依次与进路上的控制区以无线方式建立联锁关系,获得该区域的路权,并根据控制区下达的TA 许可自动运行作业,轨道动力平车(车组)完全驶离本控制区后,控制区内联锁关系解除。
进路建立过程及进路解锁过程均无需人工参与,进路控制的操作全程自动化。多项作业流程以控制区为基本进路联锁控制单位,在保证安全的前提下,可以同时进行,提高运输作业效率。
本系统可实现对轨道动力平车作业区内联锁进路的安全、可靠控制,能够保证轨道动力平车(车组)安全且高效的运行。
3 系统组成及功能
3.1 系统组成
铁路港湾站集装箱货场进路控制系统由进路控制中心、单元联锁控制区装置、轨道动力平车车载进路控制装置3 部分组成。系统框图如图2 所示。
3.2 进路控制中心功能
进路控制中心是本系统的人机交互界面,由计算机系统和通信传输设备组成。具有接收及转发作业计划、接收外部接口信息、接收轨道动力平车作业请求及应答、作业进路规划、接收轨道动力平车车载装置状态信息、接收及转发轨旁区域控制装置状态信息等信息交互及设备状态监测功能。
运动微分式(38)所包含的方程个数等于节点位移向量的维数,但该方程中还包含了另外一个未知函数,即轴线的运动量w0(t),因此需要补充一个方程。为此,对车轮的垂向运动应用动量定理。
3.3 单元联锁控制区装置功能
进路控制系统将整个轨道动力平车作业区分割为若干区域(单元联锁控制区),每个区域设有一套独立的联锁控制区装置,每个单独的单元联锁控制区装置由一个轨旁区域控制装置,若干个车辆计轴、应答器、分路道岔转辙装置和通信传输装置组成,轨旁区域控制装置与控制区内其他各装置间采用控制电缆连接。区域控制装置间按车站站场形状构成电气连接和网络连接。区域联锁控制区装置连接的示意如图3 所示。

图2 系统框图Fig.2 System diagram
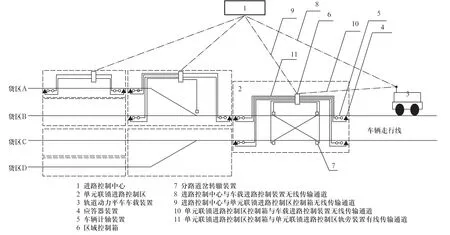
图3 区域联锁控制区装置连接Fig.3 Connection of local interlocking control area devices
轨旁区域控制装置有独立的进路控制逻辑运算及处理功能,是控制区的核心控制装置,控制和管理本区域内其他轨旁装置,具有轨道动力平车状态信息接收及处理、作业信息接收及处理、分路道岔控制、车辆占用检查、车列完整性检查、车-地信息交互应答、轨旁设备状态监测、发送联锁进路TA 运行许可等功能。
轨旁区域控制装置根据作业区内正在执行作业的各动力平车(车组)运行方向、在站场所处的位置、当前运行速度、目的地等信息,再结合各动力平车(车组)运行过程中的相对位置关系,以及联锁进路开放条件(无冲突、敌对进路),计算生成的TA 许可。通过通信系统向轨道动力平车下达运行许可。
车辆计轴装置用于检查本区域内车辆占用情况及车辆完整性检查;分路道岔转辙装置用于控制本区域分路道岔的运行方向转换。
应答器装置安装在两个控制区之间分界的位置,由进路控制子系统地面编码电路和车载接收装置组成;车辆(组)经过本区域时,与车辆(组)进行信息交互,传递定位校正、位置确认、临时限速、控制区通信切换等控制信息;定位校正能够减小无线定位的累积误差,增加作业区内平行进路的位置确认辨别能力,保证系统安全性及可靠性。
控制区通信系统分为与控制中心的通信、与相邻控制区的通信和与轨道动力平车车载通信装置的通信3 个方面,通信系统可以采用各种不同的技术方法,用于双向传输本控制区与控制中心间的状态信息、与相邻若干控制区之间的控制与状态信息、与在本控制区及相邻控制区运行的若干车载通信装置传输进路请求与运行许可控制信息及运行状态信息。
3.4 轨道动力平车车载进路控制装置功能
轨道动力平车车载进路控制装置由车载进路控制计算机系统、地面应答器数据接收装置、车辆定位接口装置、传感器接口装置、通信传输装置组成。
车载进路控制系统是车载自动控制系统的组成部分,是车载自动控制系统的核心装置,具有作业信息处理、发起进路作业请求、接收TA 许可、车载装置状态检测、车辆定位信息采集、车辆速度信息采集、车-地信息交互应答等功能。
车辆(组)根据获得的TA 许可自动运行,并根据车辆(组)在运行过程中的位置变化,不断获得新的TA 许可,直至车辆(组)获得当前位置至目的地终点的全部TA 许可或到达目的地终点停车为止。
4 技术效果
本创新目的是根据集装箱水铁联运在铁路港湾站与各港口码头铁路集装箱场(港区、货区)运输方式的特点,利用先进的自动化、信息化技术,利用新型的作业设备,采用新的车站联锁进路控制系统和进路控制方法,提高货物的运输效率。
自动驾驶运行的集装箱轨道动力平车(车组)作为装载装置时,由于作业区内,涉及轨道动力平车集结编组、平行装卸、自动运行、自动停车及返回等多个作业流程;同时为了保证货场内货物运输的及时和高效,需要尽可能的增加平行作业。传统的进路控制方式显然无法满足这些要求。
与现有技术相比,本系统具有以下特点和效果。
1)提出了一种新型的用于自动驾驶运行集装箱轨道动力平车(车组)作为运载装置的车站联锁进路控制系统及方法;
2)提出了一种由进路控制中心发送作业计划和进路选路策略,单元联锁控制区以分散自律方式对本区域内联锁进路控制,轨道动力平车(车组)作为作业执行发起者,直接参与联锁进路控制的车站进路控制系统及方法;
3)将车站(车场、货场)划分成若干个单元联锁控制区,各控制区设备组成定型,结构简单,易于实现;
4)通过新型的进路控制系统及方法,可以实现轨道动力平车运行的自动化作业,减少了作业人员,减少了集装箱中转时间,提高了作业效率。
