基于参数估计的高分辨率SAR运动目标距离徙动校正方法
2019-04-04王岩飞刘碧丹
王 超 王岩飞 刘 畅 刘碧丹
①(中国科学院电子学研究所 北京 100190)
②(中国科学院大学 北京 100049)
1 引言
运动目标成像是SAR近年来研究的热点问题。目标运动引起了多普勒中心、多普勒调频率等回波参数的变化,这既为动目标检测创造了条件,产生了前置滤波法[1]、反射特性位移法[2]等经典方法,同时也带来了距离徙动校正(Range Cell Migration Correction, RCMC)和方位聚焦的困难[1]。随着成像雷达技术的发展,SAR的分辨率不断提高,所需合成孔径时间也不断增加,精确进行RCMC已成为高分辨率运动目标成像面临的关键问题[2,3]。
由于运动目标的回波参数是未知的,要实现精确的RCMC,必须通过回波数据估计运动参数。然而,运动目标的RCMC与参数估计存在固有的矛盾:一方面,RCMC的参数依赖于从数据中估计得到的运动参数;另一方面,RCMC使目标回波包络对齐,又是正确估计运动参数的前提条件。为解决这一矛盾,多数文献[3-5]使用Keystone变换去除距离走动。虽然Keystone变换能够实现盲速目标的距离走动校正,但存在3个问题:需要插值,计算量大;对距离向速度模糊的目标估计失效;后续成像步骤仍然需要估计多普勒中心。针对Keystone的这些缺点,文献[6]提出采用硬件加速的方法提高运算速度以满足实际应用需求;文献[7]和文献[8]分别提出非基带差值法和解多普勒模糊法以解决多普勒中心混叠问题;第3个缺点也可通过后续增加多普勒中心估计步骤解决。但这些方案将不可避免地增加运算成本和算法复杂度。文献[9]提出Hough变换检测直线斜率的方法实现距离走动校正,能够克服上述缺点,但先在时域作距离弯曲校正,在未知速度参数时确定方位时域中心较为困难。文献[2]引入2阶Keystone变换校正距离弯曲,该操作虽能实现盲速目标的距离弯曲校正,但同样存在Keystone变换的缺陷。文献[3]在距离弯曲校正时忽略目标方位向速度的影响,在高分辨率下目标速度对距离弯曲的影响较大,这一近似将造成距离弯曲校正不充分。文献[10]在处理海面舰船运动目标时,提出先校正飞机速度造成的距离弯曲,再用高阶相位拟合法估计和补偿残余距离弯曲,该方法依赖强散射点,效果不够稳定。
为解决上述问题,本文提出一种与参数估计相结合的RCMC方法。该方法分4步完成,首先通过Hough变换与能量均衡法相结合估计距离向速度,消除多普勒中心偏移并校正距离走动,然后以初始方位向调频率在距离-多普勒域校正距离弯曲,再采用Map-drift估计精确的方位向调频率,最后在距离-多普勒域校正残余距离弯曲。与上述传统方法相比,该方法计算量适中,性能稳健,并且充分考虑高分辨率下残余距离徙动的影响。应用该方法对仿真数据和实际数据进行处理,实验结果表明,该方法能够去除全部距离走动和距离弯曲,适用于高分辨率运动目标成像。
2 基于参数估计的运动目标距离徙动校正
2.1 运动目标回波分析
在斜距平面内,运动目标和载机(雷达)的相对位置关系如图1所示。O为坐标原点,飞机以水平速度V匀速直线前进,在最近斜距为R0处有一速度为Vm的运动目标P,其距离向速度为Vr(远离飞机为正),方位向速度为Va(与飞机同向为正)。经过时间t,飞机运动到A点,此时飞机与目标的距离变为R。

图1 运动目标和载机的相对位置关系Fig.1 Relationship of moving target and radar
距离方程可以写为式(1),并泰勒展开至2次项
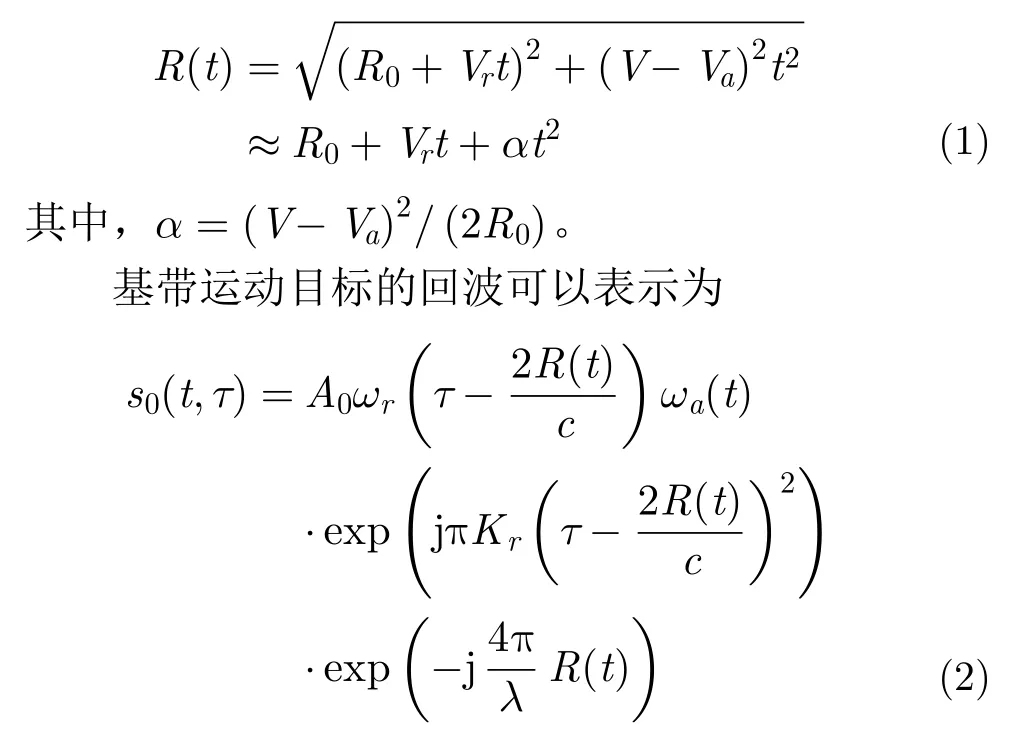
其中,A0为回波反射系数,ωa(t)为方位向包络,t为方位向时间,τ为距离向时间,R(t)为雷达与目标间的瞬时斜距,Kr为距离向调频率,λ为信号波长,c为光速。
将式(1)代入式(2),并忽略2次以上项,得到距离压缩后的回波信号为

其中,A为常数,Br为信号带宽。
在式(3)中,第2个指数项为动目标多普勒中心偏移项,偏移量与运动目标径向速度有关;第3个指数项为方位时间2次项,运动目标由于存在方位向速度,使得其调频率相对静止目标发生了变化;第4,第5个指数项分别为距离走动项和距离弯曲项,距离走动率与目标的径向运动速度有关。
动目标的多普勒中心fdc和多普勒调频率Ka可以表示为

时域内的距离走动Rwalk和 距离弯曲Rcurve可以表示为

从式(4)-式(7)可以看出,距离徙动与待估计的参数存在密切联系,动目标距离向速度造成多普勒中心变化和距离走动,方位向速度造成调频率变化和距离弯曲。
2.2 距离走动校正
对于距离压缩后的运动目标回波,距离走动使目标轨迹基本呈一条直线,如图2所示。直线的倾角与距离向速度的关系为

图2 利用目标轨迹估计距离向速度Fig.2 Estimation of range velocity by target trajectory

其中,R为距离采样间隔,Fa是方位采样率,θ为目标走动轨迹与方位向的夹角。
采用Hough变换可以估计出目标轨迹的倾角,然后由式(8)即可得到距离向速度的无模糊估计,并完成距离走动校正[9],一般情况下 α很小,Rwalk≫Rcurve,因此在这一步无需考虑距离弯曲的影响。
Hough变换是从图像特征出发的估计算法,因此估计得到的距离向速度不受多普勒中心模糊的影响。Hough变换的精度主要受变换步长的限制,为减少计算量,可以先对方位向做降采样;另外,当距离向速度较小时,目标轨迹的线性特征不显著,Hough变换的精度会受到一定影响。为提高Hough变换的精度和稳定性,本文将Hough变换与能量均衡法[11]结合使用,先用Hough变换得到多普勒中心的粗略值,确定模糊数,再利用能量均衡法得到精确的多普勒中心,然后进行距离走动校正。
与Keystone变换相比,结合能量均衡法的Hough变换计算量适中,估计值无模糊,可以一次性补偿距离走动和多普勒中心偏移,在实际应用中是一种比较合理的方案。
2.3 距离弯曲校正
在分辨率较低时,可以认为运动目标的距离弯曲主要由飞机速度产生,忽略目标方位向速度进行距离弯曲校正[3]。设合成孔径时间为Ts,由式(7)计算此近似造成的时域最大距离弯曲残余

一般要求距离弯曲残余应小于半个距离采样间隔Rbin[11],即满足式(10)时才能忽略方位向速度的影响。

代入1组实际参数:R0= 15 km,V=80 m/s,Ts=11.3 s,Va=-6 m/s,求得ΔRcurve=1.06 m。若以过采样率1.2计算,当分辨率高于2.5 m时距离弯曲残余均超过半个距离采样间隔。可见高分辨率成像时,目标方位向速度对距离弯曲的贡献不能忽略。
把式(5)代入式(7),距离弯曲可表示为

由式(11)可知,只要获得精确的调频率就可以进行完全的距离弯曲校正。本文的调频率估计采用Map-drift算法,该算法不依赖于强散射点,性能鲁棒[12]。然而,在距离徙动残余较大时,Map-drift的效果难以保证。因此,本文先利用飞机速度计算初始调频率
并做1次粗校正,消除大部分距离弯曲,然后用Map-drift估计精确调频率,最后根据式(11)再做1次精校正。
完成调频率估计和距离弯曲精校正后,运动目标的回波包络已对齐,且2阶相位误差已经补偿掉。在实际数据处理时,回波中还残余一些高阶运动误差,为了获得更好的成像效果,可以使用PGA[13]对高阶误差再做一次估计。最后按照式(12)构造频域参考函数进行聚焦成像。

2.4 目标加速度的影响
本文的RCMC算法基于式(1)的距离方程,基本假设是目标做理想的匀速直线运动,实际情况中应用更广泛的是匀加速模型。当目标存在距离向加速度Ar和方位向加速度Aa时,距离方程变为

其中,α =(V-Va)2/(2R0)+Ar/2。
对比式(1)和式(13)可以看出,当距离方程展开到2次项时,1次项系数没有变化,2次项系数包含距离向加速度Ar和方位向速度Va两个变量,方位向加速度Aa出现在高次项中,可以忽略。
由式(4)-式(7)可知多普勒中心和距离走动量都没有发生变化,而调频率和距离弯曲均会发生改变。由于距离向加速度对距离弯曲的影响与距离无关,因此当存在距离向加速度时,只采用飞机速度校正距离弯曲将造成更为明显的误差。但由于式(11)的关系不变,因而上述算法中2步距离弯曲校正仍然成立。
2.5 算法流程
根据前面的理论分析,本文提出的高分辨率SAR运动目标RCMC算法流程如下:
(1) 对雷达原始回波数据完成距离压缩和频域滤波检测;
(2) Hough变换估计距离走动轨迹斜率,结合能量均衡法得到距离向速度,完成距离走动校正;
(3) 用初始调频率作距离弯曲粗校正,将大部分距离弯曲去除;
(4) Map-drift自聚焦,估计出精确的方位调频率,同时可以得到方位向速度;
(5) 用精确的调频率作距离弯曲精校正,将全部距离弯曲去除;
(6) 后续可以完成运动目标成像和定位:PGA估计高阶残余相位误差,重聚焦得到目标图像并标注在静止图像上。
本文算法流程如图3所示。
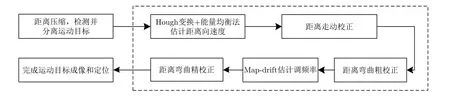
图3 本文算法流程图Fig.3 Processing steps of the proposed method
3 仿真结果

表1 雷达仿真参数Tab.1 Parameters of simulation
仿真参数如表1和表2所示,以场景中心为坐标原点,设置了3个动目标。由式(4)计算3个目标的多普勒中心分别为-104.17 Hz, 1041.67 Hz, 1041.67 Hz,显然目标2和目标3都是方位模糊的,模糊数为2。脉冲压缩之后的回波轨迹如图4所示,为便于显示,距离向和方位向分别做了4倍和8倍降采样,可以看到3个目标都存在严重的距离徙动。
首先进行距离走动校正,Hough变换之前把回波图像作方位向4倍降采样,距离步长取0.5,角度步长取0.02º;能量均衡法采用先负后正的滤波器,因而递增过零点的位置即为基带多普勒中心。为便于显示,方位向做了8倍降采样。
图5(a)-图5(c)是3个目标采用常规Hough变换校正距离走动的结果,可以看到无论是否模糊,Hough变换能够校正大部分距离走动,但是由于估计精度不高,还残留部分距离走动未能去除。尤其目标1的校正误差较大,反映出常规Hough变换在距离向速度较低时精度较差。图5(d)-图5(f)是3个目标采用结合能量均衡法的Hough变换进行距离走动校正的结果,可以看到无论是否模糊,3个目标的校正效果都很好。表3列出了常规Hough变换和结合能量均衡法的Hough变换估计的距离向速度,二者对比可以看出,本文的算法明显提升了距离向速度的估计精度和可靠性。
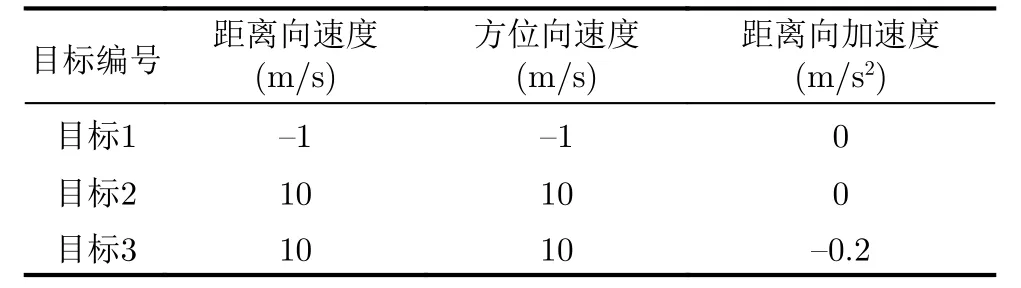
表2 目标仿真参数Tab.2 Parameters of simulated targets
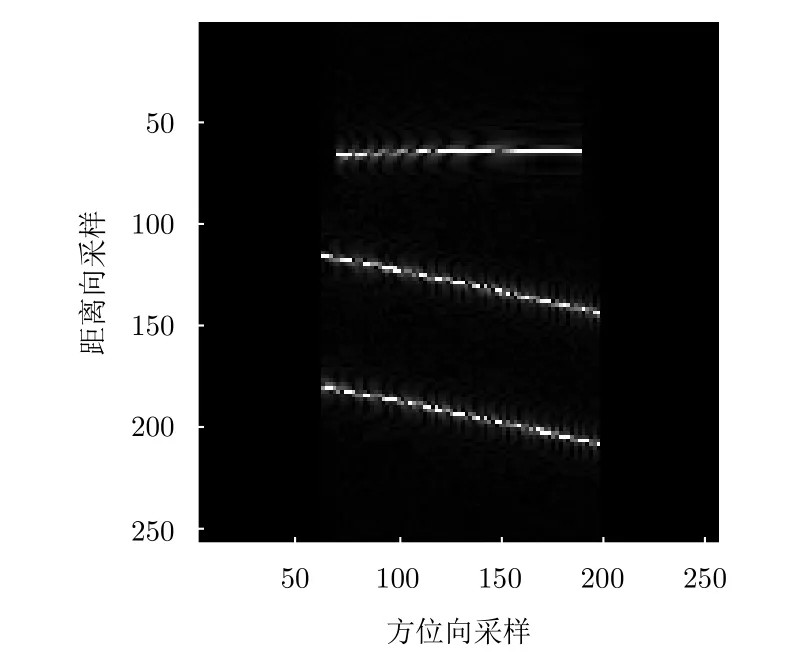
图4 距离压缩后的目标轨迹Fig.4 Target trajectories after range compression

图5 距离走动校正效果对比Fig.5 Comparison of range walk correction
接下来进行距离弯曲校正,分别考察距离弯曲粗校正和距离弯曲精校正的结果,距离弯曲校正在2维频域中完成;Map-drift的迭代终止条件设置为子图偏移3个点以内。为便于显示,方位向做了8倍降采样,并对细节做了放大。
图6(a)-图6(c)分别是3个目标忽略方位向速度进行距离弯曲粗校正的结果,从放大后的图像可以看到,目标1由于方位向速度较小且无距离向加速度,忽略目标速度对距离弯曲校正的影响不大,而目标2和目标3存在明显的距离弯曲残留。表4列出了真实调频率和Map-drift估计的调频率,二者对比可以看出,本文的算法能够精确估计调频率。用估计的调频率进行距离弯曲精校正,得到图6(d)-图6(f),可以看出3个目标的距离弯曲已经完全去除。
算法运算时间如表5所示,可以看到虽然本文算法的步骤更多,但是由于避免了Keystone变换,总体效率仍然大大优于常规算法。
基于以上仿真分析,本文所提的基于参数估计的RCMC算法能够实现高分辨率SAR运动目标的精确距离徙动校正,效果稳定,计算量少,更适合实际应用。

表3 距离向速度估计结果Tab.3 Estimation results of range velocity

图6 距离弯曲校正效果对比Fig.6 Comparison of range curvature correction

表4 方位向调频率估计结果Tab.4 Estimation results of azimuth frequency rate

表5 算法运算时间Tab.5 Execution time of traditional method and proposed method
4 数据处理结果

表6 实测数据参数Tab.6 Parameters of real data
实测数据来自电子所某机载Ku波段高分辨率SAR雷达,参数见表6。
一段包含运动目标的距离-多普勒域数据如图7(a)所示,水平方向为距离向,垂直方向为方位向。其中包含两个目标,分别命名为PT1和PT2。采用前置滤波法[14]可以滤除方位向零频附近的地杂波,提高CFAR检测的信杂比。由于这段数据的两个目标频谱有交叉,因此杂波抑制后在时域进行CFAR检测并分离回波,CFAR结果如图7(b)所示。为便于显示,方位向做了32倍降采样。

图7 动目标检测结果Fig.7 Detection of moving targets

图8 结合能量均衡法的Hough变换结果Fig.8 Results of Hough transform with energy balancing method
按照本文算法分别对PT1和PT2进行处理,首先对信号作结合能量均衡法的Hough变换,结果如图8所示。为减小计算量,变换之前将信号方位向做了8倍降采样。Hough变换的距离步长取0.5,角度步长取0.02º。
Hough变换估计出的PT1/PT2时域轨迹与方位向夹角分别为88.17°和88.45°,求得距离向速度分别为-5.67 m/s和-5.12 m/s,换算为模糊数均为0,能量均衡法估计的基带多普勒中心为437.78 Hz和501.312 Hz,换算为距离向速度分别为-4.82 m/s和-4.21 m/s,按此速度进行距离走动校正的结果如图9(a),图9(d)所示,可以看到线性走动基本被消除。忽略目标速度和加速度进行距离弯曲粗校正后,结果如图9(b),图9(e)所示,可以看出仍然残余相当大的距离弯曲,若不去除将影响后续的聚焦成像。Map-drift估计得到的PT1/PT2的调频率分别为32.09 Hz/s和210.90 Hz/s,按此调频率作距离弯曲精校正后,结果如图9(c),图9(f)所示,可见回波基本呈一条直线,残余徙动已经远小于1个距离门,说明绝大多数距离徙动已经消除。
图10是将动目标重新聚焦后,标记在静止场景上的合成SAR图像,横向为距离向,纵向为方位向,距离采样间隔0.15 m,方位采样间隔0.22 m。可以清楚地看到2个动目标位于公路上,且目标聚焦良好,说明本文的RCMC算法取得了预期效果。

图9 RCMC效果对比Fig.9 Comparison of RCMC

图10 动目标精确成像并定位的合成SAR图像Fig.10 Composite SAR image with stationary scenes and focused moving targets
5 结论
本文研究了高分辨率地面运动目标的距离徙动校正问题。为解决RCMC与参数估计之间的矛盾,提出一种结合参数估计的RCMC方法,提高RCMC的精度,有利于实现运动目标的聚焦成像和准确定位。该方法适用于高分辨率单天线SAR,具有运算量小、性能稳健的优点。仿真数据和实际SAR数据的处理结果验证了本文所提算法的有效性。
