基于超宽带信号的移动节点的室内定位算法
2019-04-02石磊,刘燕
石 磊,刘 燕
(成都师范学院,四川 成都 611130)
0 引 言
获取设备在环境中的位置是多数位置服务应用的关键。现有的定位算法,如全球定位系统(Global Position System, GPS),基于视频跟踪或射频-电磁波定位[1-2]。然而,这些定位技术因低定位精度限制了其应用,特别是在室内环境。
目前针对室内环境,学者提出了不同的估计移动设备位置的方案。这些方案使用光信号,如红外、激光、视频跟踪(如Vicon 系统)[3]以及射频信号测距。值得注意的是,室内环境的定位算法应具有低成本、易携带特性。
为此,研究人员提出许多无线射频标准的轻量级定位算法,如WiFi[4-5]、Bluetooth[6]和ZigBee[7-8]。它们都是通过测量两个设备的接收信号强度(Received Signal Strength Indicator, RSSI)测距。然而,这些测距算法的精度低,尤其在非视距环境(Non Line of Sight, NLOS)中。
由于超宽带信号具有高的时间分辨力,能够准确测量信号穿越时间(Time of Flight, TOF),为定位提供基础。无线传感网络节点 Zyggie[9]就是利用UWB信号测距的、紧凑、轻便的设备。Zyggie采用EFM32 ARM CortexM4微型控制器,控制UWB信号。并且Zyggie利用DecaWave DW100 UWB 无线芯片[10]进行TOF测量。
为此,提出基于UWB的移动节点的室内定位算法BAST。BAST算法通过TOF测量进行测距,然后再依据权重质心定位算法初始估计移动节点位置,并通过三角测量法估计移动节点位置,再通过迭代,选择最优的锚节点组,并修正测距的噪声项。最后,通过最优的锚节点组及噪声修正后的测距估计移动节点位置。仿真结果表明,提出的BAST算法能够有效地估计移动节点位置。
1 定位模型
UWB系统允许发射低功率、超短脉冲,并通过TOF测距,测距过程如下:1)发射器先向接收端发射脉冲信号,当接收端接收信号后就回复信号。而TOF就等于信号往返的时间差,如式(1)所示:
(1)
其中Tem为发射端发射信号时刻。Tre为发射端接收由接收端反馈的信号的时刻。而Tr为接收端对信号的处理时延。
再依据TTOF,推算发射端与接收端间的距离d:
d=TTOF×c
(2)
令θ=[x,y]T,θ∈R3表示移动节点位置。考虑N个锚节点,且它们位置已知。令θi=[xi,yi]T表示这些锚节点位置,且θi∈R3,i=1,2,…,N。
若需估计移动节点位置,至少需要获取与三锚节点间的距离。通过式(2)可获取离三个锚节点间的距离,可建立三个等式:
(3)
其中[xi,yi]T为锚节点的位置,ni为测距噪声,且i=1,2,…,N。
1.1 权重质心定位
引用 文献[11]的权重质心定位(Weighted Centroid Localization, WCL)估计移动节点位置θ:
(4)
其中ai表示第i个锚节点位置矢量,而ωi为锚节点相应的权重。
1.2 三边测量法
先依据式(3)测距,然后再进行等式转换,并结合三边测量法估计移动节点位置θ:
u=V·θ+e
(5)

以第一个锚节点作为基准,并引用两个变量:
(6)
依据克拉默法则,通过最小均方误差(Mean Square Error, MSE),求解移动节点的位置:
(7)
2 BAST定位算法
BAST算法旨在通过选择最优的三个锚节点估计移动节点的位置。移动节点依据式(2),先计算离锚节点的距离,并形成距离集dA={d1,d2,…,dn},其中n为移动节点邻居的锚节点数。
然后,先从n个锚节点随机选择一个锚节点作为第一锚节点,然后再依据不共线原则,再从n-1个锚节点中选择两个锚节点,进而构成初始定位锚节点集ψA={A1,A2,A3},其中A1为选择的第一个锚节点,A2、A3分别为选择的第二个、第三个锚节点。所谓定位锚节点集是指用于构成式(3)的方式的三个锚节点。
再依据三边测量法,估计移动节点的位置。为了提高定位精度[12],构建多个定位锚节点集,并进行迭代,每一组定位锚节点集都利用三边定位算法估计移动节点位置。
假定第i组定位锚节点集ψi所估计的移动节点位置为θi。由于移动节点周围有n个锚节点,可以形成n组定位锚节点集ψi,进而也能有n个移动节点的估计值,如式(8)所示:
fori=1:ndo
ψi←A1by random selected
ψi←A2andA3
θi←Trilateration(A1,A2,A3)
end for
(8)

(9)

(10)
再计算n个δi的最小值,所对应的θi值,将此θi值表示为θmin。然后依据θmin寻找到产生θi的定位锚节点集ψi={A1,A2,A3}。
回顾到式(3),测距过程有噪声项n的影响[13]。为此,利用ψi={A1,A2,A3}和θmin,推算噪声项n:
(11)
其中xmin、ymin为θmin的横坐标、纵坐标。
(12)
3 性能仿真
为了更好分析BAST算法的性能,选择如图1所示Zyggie节点,并考虑两个实验。实验一:室内步行;实验二:室内Tennis。
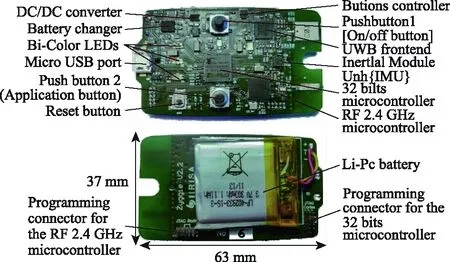
图1 Zyggie 节点结构
3.1 实验一
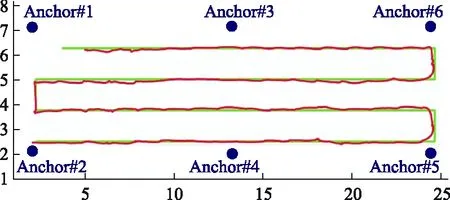
图2 移动节点估计
考虑长为26.4 m和宽为9.2 m的243 m2的房间。移动节点依据图2的绿色线移动,移动速度约3 km/h。为了估计移动节点位置,在房间里部署6个锚节点。
图2的红色线表示BAST算法对移动节点移动轨迹的估计结果。从图2可知,BAST算法能够有效地估计移动节点位置。
表1显示BAST、多点定位法、三边测量和高斯-牛顿和WCL算法的估计精度。选择平均误差(Average Error,AE)、平均标准方差(Average Standard Deviation, ASD),其表示移动节点所估计的所有点的平均误差。
从表1可知,BAST算法的平均误差最低,WCL算法的平均误差最高,而高斯-牛顿算法的平均误差与BAST算法逼近。这些算法在室内行人慢速移动环境下,定位误差的差异并不大。
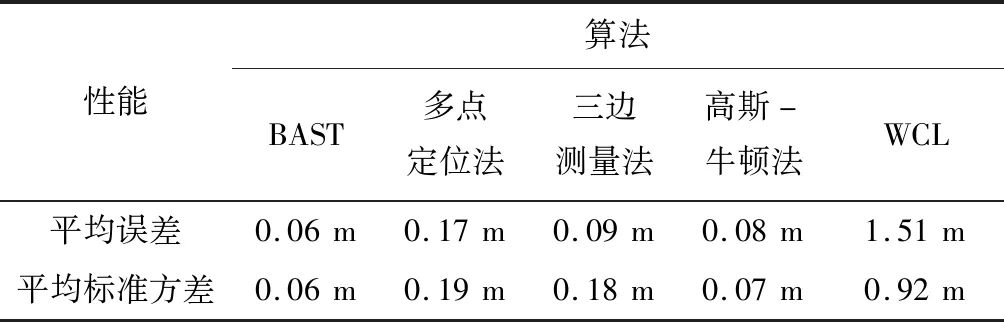
表1 各算法的定位性能比较(实验一)
表2显示了各算法的运算时间。运算时间越长,表明算法越复杂。从表2可知,BAST算法的运算时间最高,达到0.59 ms,远高于其他算法,比多点定位和WCL算法的运行算法时间提高了近2倍。
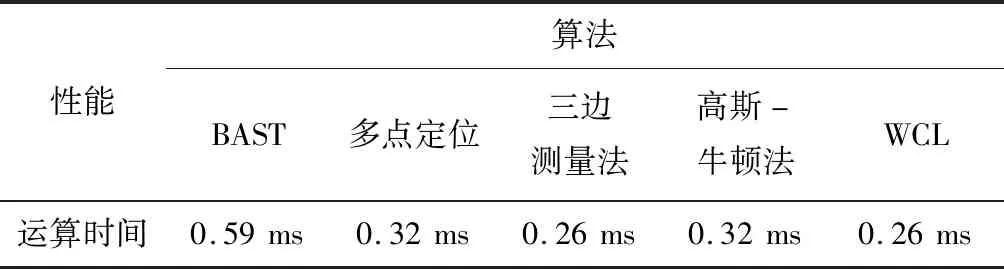
表2 算法的运算时间(实验一)
3.2 实验二
本次实验分析对网络运动员移动监测、跟踪性能。考虑一个安卓应用系统,运用场景如图3所示。在运动场的角落设置锚节点,图中的蓝色为锚节点位置。将运动员看成节点,通过算法监测节点的移动轨迹。
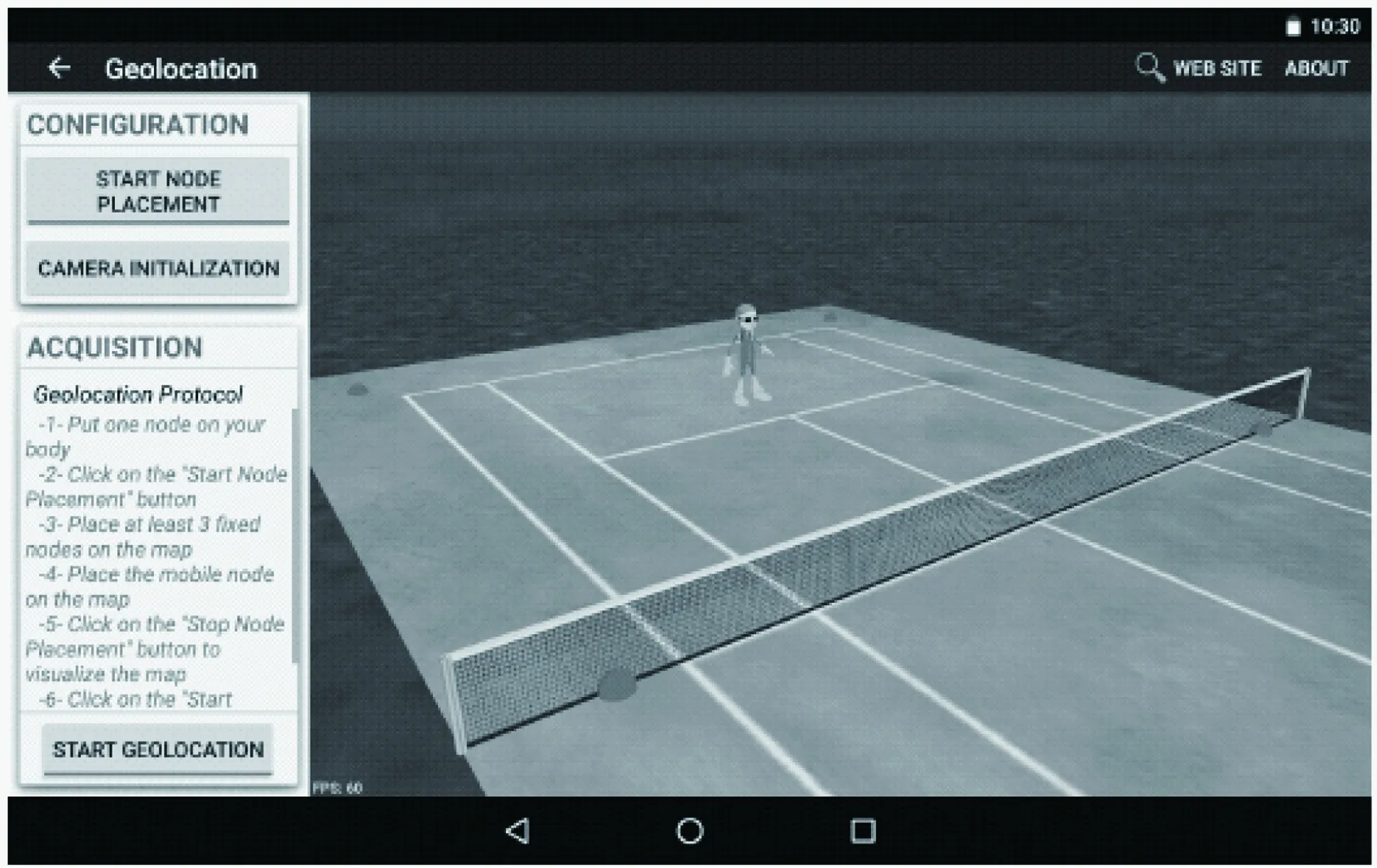
图3 运动场景
表3显示了各算法的移动节点位置跟踪性能。从表3可知,提出的BAST算法的平均误差最低,低至为1.08 m,而WCL算法的平均误差最高,达到4.50 m。而多点定位法、三角测量法和高斯-牛顿法的平均误差分别为1.36 m、2.11 m和1.51m。这也表明,相比其他算法,BAST算法能够有效地跟踪移动节点位置。
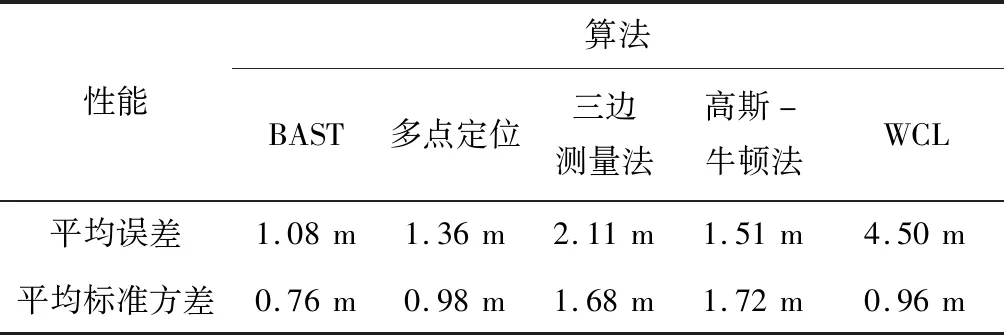
表3 各算法的定位性能比较(实验二)
平均标准方差反映了定位精度的波动。从表3可知,BAST算法的平均标准方差为0.76,远低于三角测量法和高斯-牛顿法的算法。这也表明,BAST算法具有稳定的定位精度。
此外,表4显示了各算法的运算时间。从表4可知,BAST算法的运算时间最高,比三角测量法和WCL算法的运算时间提高了近一倍。结合表3和表4可知,尽管BAST算法提高了定位精度,但运算时间大幅度地提高。但所提高的运算时间量来看,增加的运算时间并不多。例如,BAST算法的运算时间为0.61 ms,而最优的三角测量法的运算时间为0.26 ms,只增加了0.25 ms。
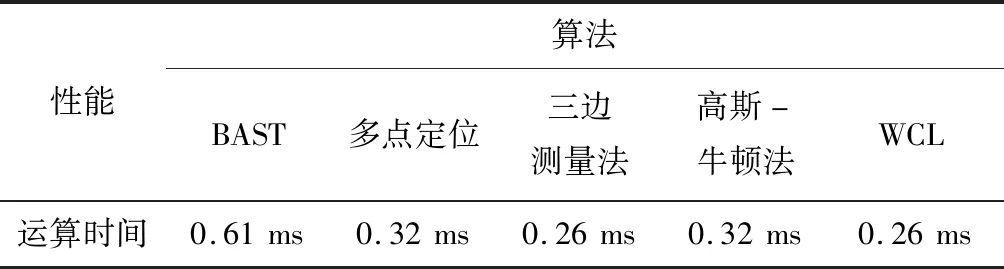
表4 算法的运算时间(实验二)
4 结 语
针对移动节点的室内定位问题,提出了基于UWB信号的移动定位算法BAST。BAST算法通过测量移动节点离锚节点间距离为基础,再结合三边测量法估计移动节点位置。而BAST算法利用UWB无线信号的交互,进行TOF测量,进而估计测距。
引用可穿戴、低功耗、轻量级的Zyggie节点进行实验。考虑步行和网球运动两个场景。通过实验数据表明,BAST算法获取低的定位精度。在步行环境,平均定位误差0.06 m,而网球运动场景,平均定位误差为1.08 m。
通过实验数据可知:高斯-牛顿算法的复杂度低于BAST算法,当移动节点移动缓慢时,高斯-牛顿和BAST算法具有相同性能。但是,在移动速度较快环境,如网球运动场景,BAST算法仍能够获取高的定位精度,远高于其他算法。