基于状态动作解耦模型的遥感卫星自主操控设计*
2019-03-31李小娟汪大宝于俊慧杨柳青
李小娟,汪大宝,于俊慧,袁 珺,杨柳青
基于状态动作解耦模型的遥感卫星自主操控设计*
李小娟,汪大宝,于俊慧,袁 珺,杨柳青
(北京空间飞行器总体设计部 北京 100094)
针对传统的自主操控方案在应对高分辨率综合遥感卫星时操控效能不足的问题,提出一种基于状态动作解耦模型的遥感卫星自主操控设计方法。根据指令的注入频率不同,采用三类指令完成任务相关的载荷操控动作,实现状态设置和指令动作解耦,从而实现减少冗余信息上注、提高上注效率的效果,同时,有效降低地面测试复杂度。某高分辨率综合遥感卫星的在轨应用表现表明:相对于传统的自主操控方法,上注效率提高80%以上,地面测试复杂度降低75%,有效提升在轨操控效能。
遥感卫星;状态-动作解耦模型;自主操控
引 言
随着遥感卫星功能、性能的快速提升,成像模式、姿态机动、数据存储、数据传输策略越来越复杂。传统的基于模板指令序列的操控模式受星地测控时间短、卫星操控精细化程度高等因素的限制,已经成为制约遥感卫星在轨使用效能的瓶颈[1]。为此,自主任务管理技术具有对测控资源依赖低、星载资源使用效率高等优点,越来越受到各航天大国的重视。Charmeau和Damiani[2]建立了连续决策模型,用动态规划算法求解该模型,然而当使用约束增加时,规划问题将变得非常复杂。Bensana 和Verfailie[3]建立了整数线性规划模型,该模型能够将多数任务规划设计的约束考虑进来,但是这种方法的效率不高,信息冗余大。吴保峰[4]等把以往多条独立的间接指令组成封装系列指令,星上自动判断指令的执行条件,简化了卫星遥控操作,提高了可靠性,但对于载荷工作模式复杂的卫星,复杂度会变高。刘洋[5]等采用指令序列上注模式解决卫星在轨任务期间短周期内多指令上注的问题,通过增加专用任务指令和专用任务调整指令的方法,减少占用的遥控信道资源,但没有对遥感卫星任务的指令设计方法进行定义。当前在轨常用模式为地面进行任务规划,生成相应的任务指令发送至卫星,星上执行相应的动作,在这种模式下,如何简化卫星的操控接口,提高指令注入效率,同时降低用户的操作风险成为自主任务管理研究的重点,而文献[2-5]中航天器的载荷单一,且载荷工作模式简单,均不涉及复杂遥感卫星的在轨操控问题。随着我国高分辨率对地观测系统重大专项工作的开展,卫星通常搭载多种传感器,如可见光相机、红外相机、多光谱成像仪、角位移传感器、大气校正仪等,且卫星成像分辨率和姿态机动能力快速提升,工作模式和在轨操控也越来越复杂[6]。现有的自主任务管理技术面临多载荷、复杂工作模式遥感卫星时,存在较大局限性,首先,多载荷导致上注信息量成倍增加,由于缺少上注信息优化,导致上注效率低;其次,现有的基于指令模版的遥感卫星操控方法将载荷工作的所有细节都开放给用户,涵盖载荷工作的所有动作,一旦使用不当,轻则影响用户任务成败,重则引起星上设备损坏的灾难性后果;同时,由于载荷控制和成像参数紧密耦合,多载荷及复杂工作模式导致指令模版数量急剧增加,当地面测试或者在轨测试出现某台设备故障需要切换至备份时,需要更新所有的指令模版,给用户的运控系统带来了极大的工作量。
为此,提出一种基于状态动作解耦模型的遥感卫星自主操控设计方法,根据指令的注入频率不同,采用三类指令完成任务相关的载荷操控动作:卫星研制方采用载荷设备工作状态指令完成载荷设备拓扑设置;运控系统采用固定的载荷控制指令完成载荷动作设置;任务提出部门根据任务目标点的特征和载荷组合模式,采用成像参数设置指令完成与目标特性相容的成像参数设置。卫星在轨日常运行过程中,运控系统和任务提出部门通过测控系统上注载荷控制指令和成像参数设置指令,载荷指令和成像参数指令配合完成侦察任务,在星上载荷设备异常需要切换设备状态或者调整设备工作间的工作时序时,卫星研制方通过测控系统上注载荷设备工作状态设置指令重构星上载荷模型,更改载荷控制指令在星上自主生成的指令序列,而无需更改运控系统和任务提出部门与卫星的操控接口。理论分析和在轨应用表明该方法能够适应多种载荷的、针对高性能和复杂工作模式遥感卫星的自主操控,对提升卫星的自主任务管理水平有着显著效果。
1 低轨遥感卫星操控特点分析
高分辨率综合遥感卫星是指配备多种载荷,具有高分辨率、高敏捷性、高稳定性的低轨遥感卫星,通常具备复杂的卫星成像模式、载荷组合模式、星上载荷数据处理模式、海量数据传输策略。它与传统遥感卫星相比,具有运控复杂、在轨应用风险大等特点,具体体现在以下几个方面:
①任务测控注入效率低:低轨卫星过境窗口短,在轨仅5%~10%的时间可在境内执行测控任务[7],由于敏捷成像能力的提升以及卫星工作模式越来越复杂,卫星成像能力急剧增加,近三年以来,我国卫星的成像任务能力增长了167%,任务模板数增长了三十倍,任务指令数增长100%[8]。要求卫星每天注入的任务量由20~30个提升到100~120个左右,现有的任务测控模式已成为限制卫星在轨效能的瓶颈。以我国最近发射的某综合型遥感卫星为例,通过对147天在轨测试的运行数据进行统计分析,卫星能源使用效率不足50%、存储资源使用效率不足40%、数传弧段使用效率不足70%,提高上注效率成为迫在眉睫的问题。
②在轨运行风险大:由于多载荷之间控制时序、多工作模式参数存在制约关系,导致指令组合模式呈指数倍增长,不仅地面测试阶段难以覆盖,在轨运行阶段用户使用指令模板操控星上设备存在安全隐患,一旦使用不当,轻则影响用户任务成败,重则引起星上设备损坏的灾难性后果。
综上所述,我们认为高分综合遥感卫星操控提升的关键是通过状态动作解耦的方式,在保证上注信息量不变的前提下,通过对指令进行重新分类、并优化编码方式,可解决上注数据量大、冗余信息多的问题,同时降低在轨运行风险。
2 状态动作解耦模型设计
2.1 模型设计
基于状态动作解耦模型的遥感卫星自主操控设计,根据指令的注入频率不同,采用三类指令完成任务相关的载荷操控动作:首先,卫星研制方采用载荷设备工作状态指令完成载荷设备拓扑设置;接着,运控系统根据任务规划的结果,采用固化的载荷控制指令完成载荷动作设置;最后,任务提出部门根据任务目标点的特性和载荷组合模式,采用成像参数设置指令完成与目标特性相容的成像参数设置。基于状态动作解耦模型的遥感卫星自主操控设计方法示意图如图1所示。

图1 基于状态动作解耦模型的遥感卫星自主操控设计方法
其中,三类指令主要完成的功能以及设计约束如下所示:
①载荷设备工作状态指令:主要完成星载设备的主备份切换或者特殊工作模式设置(如相机暗电平参数、定标参数设置等),通过载荷设备工作状态指令可以更改载荷控制指令在星上自主生成的指令,使用频率很低,仅在卫星故障或者调试时使用,不限制指令码字长度,采用单指令上注、单指令执行模式;
②成像参数设置指令:主要用于载荷成像前的参数设置,与每次成像目标特性和载荷组合模式密切相关,使用频率较高,变长码字编码,采用块指令上注、单指令执行模式。可将各载荷的不同成像参数设置为独立的成像参数设置指令,每个指令都有自己的独立执行时间,同时星务计算机会将每种载荷成像参数做为重要数据进行保存。任务提出部门根据每次任务的目标点特性和载荷使用组合模式选择需要注入的成像参数设置指令,并将其打包为块指令上注,星务计算机将块指令展成单指令,并根据开始执行时刻执行,更新载荷成像参数数据区中相应的参数,若本次任务的个别参数和上次任务相同,则不需要重新注入,成像参数重要数据区中对应参数仍保持之前的状态,在特定时机,星务计算机会将载荷成像参数重要数据区中的所有内容发送至载荷智能终端;
③载荷控制指令:主要完成载荷设备的开关机以及常规操作,与载荷组合模式密切相关,运控系统根据任务规划的结果生成,使用频率最高,可使用4个字节的最短长度码字编码,采用块指令上注、块指令执行模式。每个任务对应一个载荷控制指令,每个载荷控制指令都有自己的开始执行时刻,可将多个任务的载荷控制指令打包上注,星务计算机将块指令展成单个的载荷控制指令,并根据开始执行时刻,由星上自主展成多条单指令,第一条指令的执行时刻为载荷控制指令的开始执行时刻,后续指令均按照与第一条指令的相对时间发送至载荷智能终端。
2.2 设计流程
在卫星研制初期,需根据卫星工作模式对载荷任务相关的指令进行设计,设计原则如下:
①根据载荷任务相关的指令的用途对指令进行分类:首先根据各载荷的工作模式,梳理完成载荷工作所需的载荷指令序列,基于状态动作解耦模型,识别出成像参数类以及设备工作状态类指令,将载荷原有的成像参数指令替换为载荷成像参数触发指令(固定码字)放入载荷指令序列中,该序列可作为后续载荷控制指令自主分解并执行的依据;接着,将低轨遥感卫星载荷在工作前需要设置一些参数,根据不同参数上注的频率不同的原则,将载荷工作前的参数分为任务参数(与每次任务相关,用户需要根据不同的任务设置不同的参数,如光学相机的增益与级数设置等),成像参数(只有在特定需求下才需要进行调整,如包括CCD成像方式(同速、异速)等),软/硬件故障参数(只有在故障情况下才需切换),该类指令会在星上收到载荷成像参数触发指令后,由星务计算机打包重组成载荷原始的成像参数指令发送给载荷智能终端;最后,将更改载荷单机主备份、需要通过在轨标定获的参数而进行的设置、以及更改星上原有的载荷控制序列这类不常用的操作,设计为载荷设备工作状态指令。
②对三类指令的格式进行设计:载荷设备工作状态指令,使用频率很低,仅在卫星故障或者调试时使用,对载荷设备工作状态指令格式没有特殊要求,不限制指令码字长度,通常采用单指令上注的方式,确保该类指令正确执行后,才能进行后续正常的载荷任务工作;成像参数设置指令,每种类型的成像参数设置执行都需包含执行时刻,由于每个任务需要上注的成像参数设置指令个数不定,为了减小上注注入数据量,可将多个成像参数设置指令打包至一个数据块中,星务计算机接收到该数据块再进行分解及后续操作;载荷控制指令,主要完成载荷设备的开关机以及常规操作,使用频率最高,可根据载荷类型的不同,将一系列同种载荷的动作封装成指令组/块的方式,每个载荷控制指令都有自己的开始执行时刻,可将多个任务的多个载荷控制指令打包上注,星务计算机接收到该数据块再进行分解及后续操作。
③三类任务相关的载荷操控指令在星务计算机的存储及约束关系如下:
星务计算机开辟相应的存储区用来保存个载荷的成像参数:载荷1成像参数保存至载荷1成像参数数据区,载荷2成像参数保存至载荷2成像参数数据区……载荷成像参数保存至载荷成像参数数据区,成像参数设置指令对载荷成像参数数据区中的某一个参数进行修改。根据载荷的时序,制定各载荷成像参数的发送时间:载荷成像参数1至载荷成像参数j(∈[1,])是在发送载荷的成像参数触发指令j后发送,载荷的成像参数触发指令j是与载荷设备控制相关的硬件指令,或者是与硬件指令具有确定时序关系的自定义软指令。
根据载荷的控制时序以及载荷间的约束关系,制定短编码的载荷1控制指令,载荷2控制指令,……,载荷控制指令,并以有效数据输出时刻为基准,计算载荷1控制指令,载荷2控制指令,……载荷控制指令发送时刻的相对时间关系,并按照指令发出时间由先而后的顺序排序,形成载荷控制指令序列块。
星务计算机接收到载荷设备工作状态设置指令后立即执行,不存储该类指令。
④按照三种类型的不同,星务计算机采用了三个进程进行处理。成像参数设置指令进程负责对指令块进行分解、并按照指令执行时刻将指令排序并缓存,定时轮询,按时间符合执行相应指令,并对载荷设置参数表中相应内容进行更新,并在接收到触发指令后,对载荷参数重组并发送至载荷智能终端;载荷控制指令处理进程负责对载荷控制指令序列块进行分解、缓存、轮询,按时间符合进行顺序发送;载荷设置工作状态进程负责按照载荷设备工作状态设置指令对载荷设备主备份工作状态以及载荷的控制指令序列等进行更新。
2.3 实现方法
实现方法如图2所示,实现方法具体步骤如下所示:
①任务接收及分解:星务计算机接收注入的载荷控制指令块、成像参数设置指令块或者载荷设备工作状态设置指令,星务计算机对指令和指令块进行校验,并根据注入指令类型进行分解,分解为三个进程:成像参数设置指令处理进程(步骤②)、载荷控制指令处理进程(步骤③)和载荷设备工作状态设置指令(步骤④);
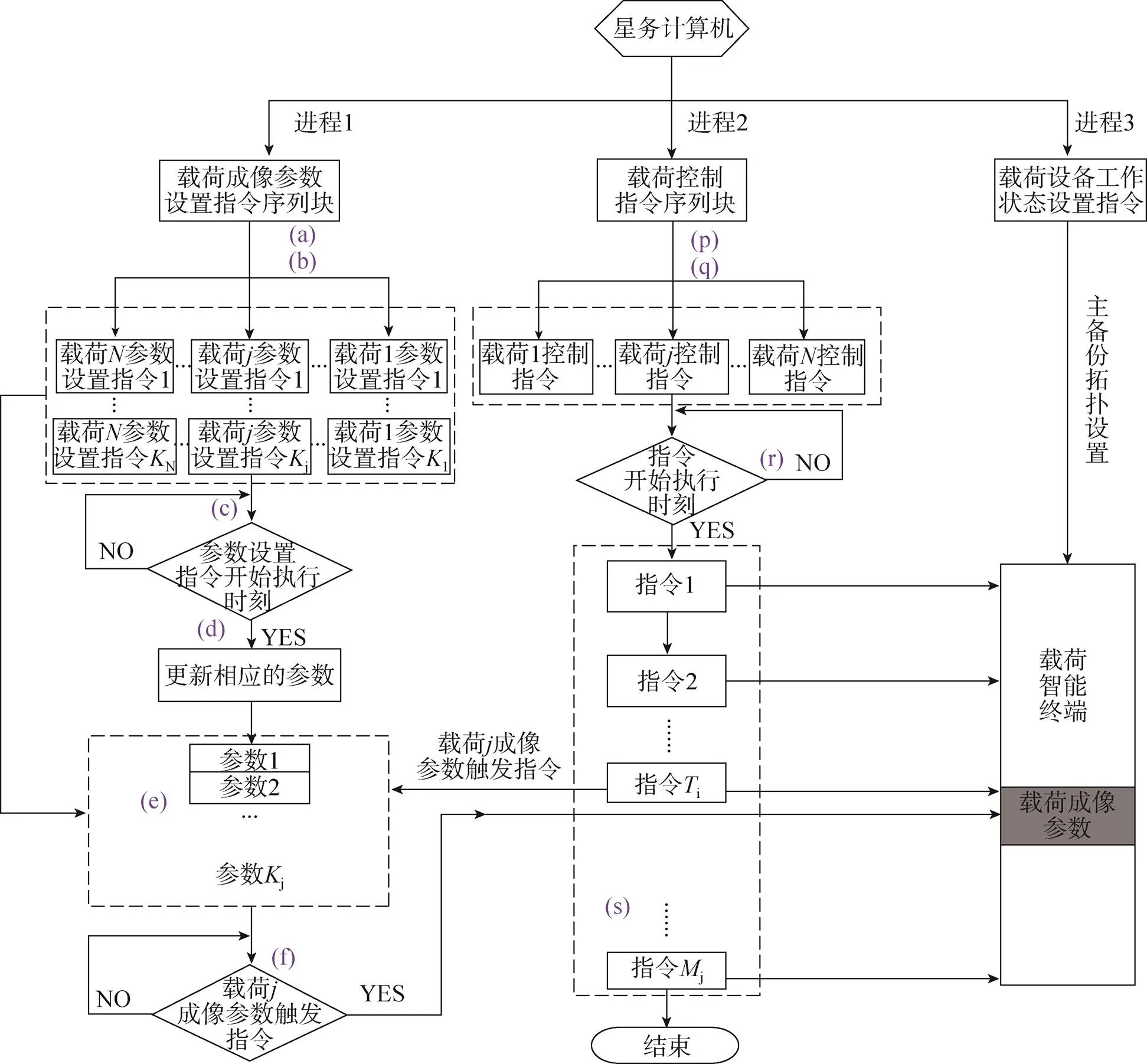
图2 指令处理流程
②成像参数设置指令处理:
a.分解:将数据块中的指令分解为单条的指令,其中载荷(∈[1,])的设置指令序列中又包含j个参数的单指令;将数据块中的指令分解为单条的指令,分解出的每个单载荷成像参数设置指令都有自己的执行时间;
b.缓存:按照指令执行时刻的大小将指令排序并缓存;
c.轮询:按照一定的时间间隔查询缓存区中的指令,判断是否到达成像参数设置指令的执行时刻,若未到时,则维持步骤c;若到时,则执行步骤d;
d.更新:星务计算机会根据设置参数指令的具体内容对载荷设置参数表中的某一个参数进行更新;
e.重组:根据载荷成像参数设置指令序列块中的具体内容对星务计算机中当前的载荷参数重组并更新。
f.触发执行:星务计算机发送成像参数触发指令j后,将载荷的所有参数发送至载荷智能终端。
③载荷控制指令处理:
p. 分解:按照载荷分类,将载荷控制指令序列块分解成载荷1,载荷2,……,载荷的控制指令序列,载荷控制指令(∈[1,])进一步自主分解为指令1、指令2、……,指令j、指令j,其中指令j是载荷的成像参数触发指令;
q. 缓存:每个载荷的控制指令按照执行时刻的大小排序并缓存;
r. 轮询:按照一定的时间间隔查询缓存区中的指令,判断是否到达载荷控制指令的开始执行时刻,若未到时,则维持步骤r;若到时,则执行步骤s;
s. 定时执行:依次执行载荷控制序列块中的指令,同时检查载荷控制指令的类型,如果为载荷的成像参数触发指令j,则将载荷的参数1、参数2、……、参数j一同发送至载荷智能终端;
④载荷设备工作状态设置指令:
若需要更改载荷设备工作状态,则需要卫星方使用载荷设备工作状态设置指令进行更改,包括切换载荷设备主备份工作状态,设置卫星设备最佳工作状态参数,设置载荷(∈ [1,])的控制指令序列,载荷设备工作状态设置指令更改的是载荷控制指令在星上自主展开生成的载荷控制指令序列,运控系统通过测控系统上注的载荷控制指令仍不变,即该更改不影响开放给用户的操控接口,不会影响地面运控系统的使用方式。
3 在轨应用效果
本方案已应用于高分辨综合遥感卫星。卫星装载可见光相机、多光谱成像仪、角位移传感器、大气校正仪,采用490km高度太阳同步轨道,通过在轨表现可知,本方案对操控效率具有明显的提升作用。
①将载荷任务相关指令按照注入频率进行分类,并且高频率应用指令采用短编码、低频率应用指令长编码,在确保任务信息量的前提下,大大提高上注效率。载荷控制指令采用4字节短编码方式,避免了传统操控模式每次任务多达80%冗余信息量,同时,载荷参数设置指令也可根据每次任务实际需求进行设置,避免了重复注入的缺点,提高了参数设置的灵活性;
②将载荷工作的细节信息都提前固化在星务计算机中,需要更改时,卫星方通过载荷设备工作状态设置指令进行修改,降低了用户操控的风险;
③降低地面及在轨测试的复杂度,使用传统的指令模版操控模式,指令模版中包含载荷开关机、参数设置等指令,考虑到载荷设备之间主备各种交叉组合,针对特定工作模式至少需要有全主份、主备、备主和全备份四种组合的指令模版,采用文中模型,将更多的细节固化在星上,通过载荷设备工作状态指令改变星上固化的载荷设备状态,开放给用户的载荷控制指令无需关心星上设备状态,仅需考虑全主份的载荷状态即可。
同时,使用该种操控方法,还可以提高卫星的应急响应能力,当目标点参数发生变化时,只需删除旧的载荷成像参数、注入新的载荷成像参数即可,而不用重新上注载荷控制信息。
4 结束语
本文分析了制约高分辨率综合遥感卫星使用效能的主要因素,提出了一种基于状态动作解耦模型的遥感卫星自主操控方法。经过飞行验证,有效提高了卫星的上注效率、操控灵活性,降低了测试复杂程度。相对于传统的操控方法,上注效率提高了80%以上,同时极大降低地面测试复杂度。
[1] 贺仁杰, 李菊芳, 姚锋, 等. 成像卫星任务规划技术[M]. 北京: 科学出版社, 2011. HE Renjie, LI Jufang, YAO Feng, et al. Earth observing satellite mission planning[M]. Beijing: Science Press, 2011.
[2] DAMIANI S, CHARMEAU C. A continuous anytime planning module for an autonomous earth watching satellite[C]. ICAPS05 workshop on planning and scheduling for autonomous systems, California, 2005: 19–28.
[3] BENSANA E, VERFAILLIE G, AGNESE J C, et al. Exact &INEXACT methods for daily management of earth ovservation satellite[C]. Space mission operation and ground data syatem-spaceops’ 96, munich, 1996: 397–507.
[4] 吴保峰, 李志刚, 李军予, 等. 面向任务的小卫星自主指令设计[J]. 航天器工程, 2013, 22(4): 68–71. WU Baofeng, LI Zhigang, LI Junyu, et al. Design of Mission Oriented Autonomous Commands for Small Satellites[J]. Spacecraft Engineering, 2013, 22(4): 68–71.
[5] 刘洋, 李家琦, 李宗德. 有限上行资源下遥控指令序列高效上注方案设计[J]. 遥控遥测, 2014, 35(6): 45–49. LIU Yang, LI Jiaqi, LI Zongde. Design of High-efficiency Telecommand Upload Method under Limited Uplink Channel[J]. Journal of Telemetry, Tracking and Command, 2014, 35(6): 45–49.
[6] 葛玉君, 赵键, 杨芳. 高分辨率光学遥感卫星平台技术综述[J]. 国际太空, 2013(5): 2–8. GE Yujun, ZHAO Jian, YANG Fang. Review of high resolution optical remote sensing satellite[J]. Space International, 2013(5): 2–8.
[7] 金光, 武小悦, 高卫斌. 卫星地面站资源配置仿真研究[J]. 系统仿真学报, 2004, 16(11): 2401–2403. JIN Guang, WU Xiaoyue, GAO Weibin. Simulation-based study on resource deployment of satellite ground station [J]. Journal of System Simulation, 2004, 16(11): 2401–2403.
[8] 田志新, 汤海涛, 王中果, 等. 基于星上动态指令调度的卫星使用效能提升技术[J]. 宇航学报. 2014, 35(10): 1105–1113. TIAN Zhixin, TANG Haitao, WANG Zhongguo, et al. Satellite utility Improvement technique based on dynamic on-board command scheduling[J]. Journal of Astronautics, 2014, 35(10): 1105–1113.
Design of autonomous commands for remote sensing satellite based on state-action decoupling model
LI Xiaojuan, WANG Dabao, YU Junhui, YUAN Jun, YANG Liuqing
(Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)
A design of autonomous commands for remote sensing satellite based on state-action decoupling model is proposed in this paper, with the purpose of improving the traditional insufficient handing efficiency for controlling the high-resolution remote sensing satellite automatically. Three kinds of commands are adopted to complete the task-related load control action, according to the difference of command’s use frequencies, to achieve the decoupling of state-action. With the design of autonomous referred to in this paper, the proportion of redundant information in the whole commands injected to the satellite is reduced significantly, the injection commands effectiveness to satellite is improved effectively, and the complexity of ground comprehensive test is reduced. The performance of the certain high-resolution remote sensing satellite on-orbit shows that, with autonomous commands based on state-action decoupling model, the injection commands effectiveness is reduced by 80% and the complex of ground comprehensive test is reduced by 75%, compared to the traditional design of commands.
Remote sensing satellite; State-action decoupling model; Autonomous commands
V474.2
A
CN11-1780(2019)05-0061-06
Email:ycyk704@163.com TEL:010-68382327 010-68382557
高分辨率对地观测系统重大专项青年创新基金支持项目(GFZX04060103)
2019-06-12
李小娟 1986年生,硕士,工程师,主要研究方向为卫星数据系统总体设计。
汪大宝 1982年生,博士,高级工程师,主要研究方向为卫星总体设计。
于俊慧 1988年生,硕士,工程师,主要研究方向为星务计算机软件开发。
袁 珺 1986年生,硕士,工程师,主要研究方向为星务计算机软件开发。
杨柳青 1984年生,硕士,工程师,主要研究方向为星务计算机软件开发。
