薄壁零件测量系统研究实现
2019-03-30应冬梅郭阳宽
应冬梅 郭阳宽

摘要:针对薄壁机械零件设计了基于面结构光的三维视觉测量系统。搭建硬件系统并采用系统标定、四步相移和时间相位展开等关键算法实现对零件的三维重建。实验结果表明通过该系统获得零件各参数的方案具有高准确性。
关键词:面结构光;四步相移;时间相位展开;三维重建
中图分类号:TP27 文献标识码:A 文章编号:1007-9416(2019)12-0182-02
0 引言
大多数的机械零部件测量方式为接触式测量,不仅存在检测速度慢、精度低、人工成本高等问题,测量方式也具有主观性的测量误差,严重时可能对零部件表面造成难以预计的损伤。并鉴于机器视觉检测技术具有高效率、高精度、高实时性、高稳定性等优点[1],本文设计了基于面结构光的三维视觉[2]测量系统。
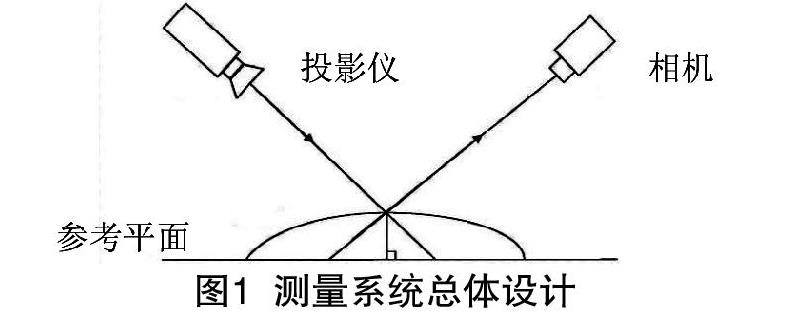
1 系统总体设计和系统构建
系统总体设计如图1所示。主要由工业相机、投影仪、固定支架、计算机组成。投影仪投射四副不同频率的光栅条纹图至零件上,工业相机采集经零件表面调制变形的条纹图并运用四步相移算法和时间相位展开算法对其进行相位提取和展开,根据相机和投影仪标定参数实现对零件的三维重建。
2 算法设计
系统软件结构设计为六大模块,如图2所示。
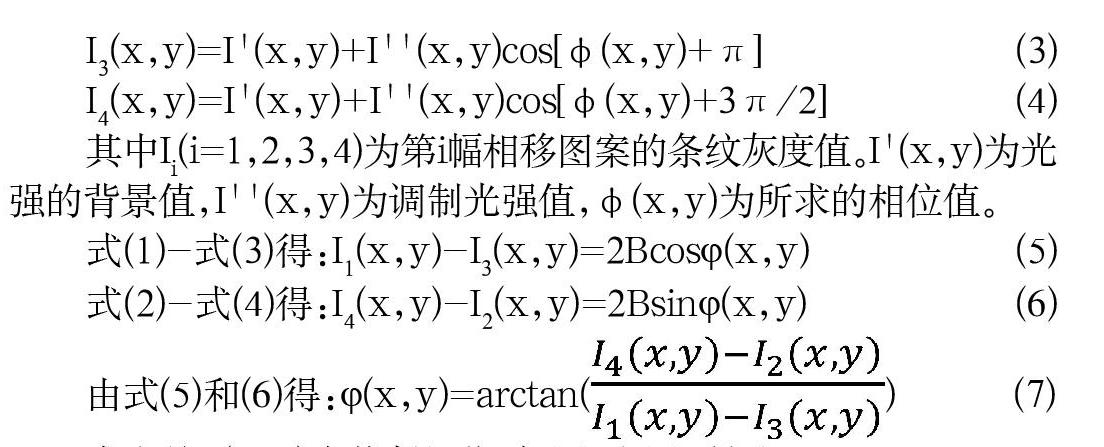
本文采用相移法,投影光强是标准余弦分布。相移图案每次移动2π/N的相位,产生一个新的光强函数In(x,y),平移N-1次,获得N幅相移图案。四步相移法[3]是将投射的相移图案每次平移π/2,平移三次。如图3所示。
I1(x,y)=I'(x,y)+I''(x,y)cos[φ(x,y)] (1)
I2(x,y)=I'(x,y)+I''(x,y)cos[φ(x,y)+π/2] (2)
I3(x,y)=I'(x,y)+I''(x,y)cos[φ(x,y)+π] (3)
I4(x,y)=I'(x,y)+I''(x,y)cos[φ(x,y)+3π/2] (4)
其中Ii(i=1,2,3,4)为第i幅相移图案的条纹灰度值。I'(x,y)为光强的背景值,I''(x,y)為调制光强值,φ(x,y)为所求的相位值。
式(1)-式(3)得:I1(x,y)-I3(x,y)=2Bcosj(x,y) (5)
式(2)-式(4)得:I4(x,y)-I2(x,y)=2Bsinj(x,y) (6)
由式(5)和(6)得:j(x,y)=arctan() (7)
求出的j(x,y)为截断相位,如图4和图5所示。
由上述求出的截断相位要得到连续分布的相位绝对值(x,y)就必须要对它的主值相位进行展开。
本文所采取时间相位展开算法如下:(x,y)=2nπ+j(x,y) (8)
通过时间相为展开算法获得连续相位值后,根据物相转换关系得到零件的高度信息,根据相机标定参数得到零件二维坐标信息,通过点云滤波、处理等过程获得理想的点云图像并导入SolidWorks实现三维重建和尺寸测量。
3 系统搭建与测试
搭建了整体硬件系统后,图6是四步相移图案至测量零件表面采集的变形条纹图;图7的三幅图分别是软件处理得到的点云图、滤波后点云图以及获得的零件三维图。
4 结语
本文研究实现了对薄壁零件三维测量系统的硬件系统搭建和软件算法编写,实现了对薄壁零件的三维测量,并且基于面结构光的单目视觉测量系统结构简单,成本低,有望应用于其它物品的三维检测。只是算法优化有待进一步完善,以进一步确保检更高的精度。
参考文献
[1] 杨洁,李乐.基于机器视觉的表面粗糙度测量与三维评定[J].光学技术,2016,42(06):491-495.
[2] ZHANG G,WEI Z.A novel calibration approach to struc-tured light 3D vision inspection[J].Optics & Laser Tech-nology,2002,34(5):373-380.
[3] 王秀鹏.基于面结构光的航空零部件三维测量和精度检测[D].华中科技大学,2012.
Research and Realization of Mechanical Parts Measurement System
YING Dong-mei,GUO Yang-kuan
(Key Laboratory of Beijing for Optoelectronic Measurement Technology, Beijing Information Science
and Technology University, Beijing 100192)
Abstract:A 3D visual measurement system based on surface structured light is designed for mechanical parts. The 3D reconstruction of the parts is realized by the key algorithms such as system calibration, four-step phase shift and time phase expansion. The experimental results show that the scheme of obtaining the parameters of the parts by the system has high accuracy.
Key words:surface structured light; four-step phase shift; time phase UNWRAPPING; three-dimensional reconstruction
