基于多MCU的电动汽车智能控制系统的设计与应用
2019-03-30朱云舒雄
朱云 舒雄
【摘要】 多MCU的结构体系可以很好的解决功能单一、存储空间不足等问题,其分层递阶式控制体系为电动汽车提供了更广的系统资源。一方面,每个MCU独立处理自身单元的功能信息,同时各单元之间通过高效的通信传送数据;另一方面,多MCU体系不仅提供了丰富的系统功能,并预留了扩展端口,为电动汽车后期的提升空间搭建了平台。基于多MCU的电动汽车智能控制器,该控制器包括电动汽车轮毂电机驱动单元、电机转速提取单元、电流检测及驱动方式切换控制单元。
【关键词】 多MCU 电动汽车 智能控制器 信息通信
引言
汽车作为社会发展的重要产业之一,它的快速增长在提高人们生活水平的同时,也带来了诸如石油危机、环境危机等交通与社会问题。人们正在寻求一种绿色可持续的交通工具,而目前电动汽车因其绿色环保、能源可再生、使用成本低等特性已经吸引了越来越多的关注。然而,与传统燃油汽车相比,电动汽车还存在一些亟待解决的问题,比如续航里程短、充电时间长等。另外,电动汽车是由电机驱动,要实现电动汽车对复杂交通与行驶工况的适应于匹配,需要有外接的各种控制功能模块,而这些模块组成的控制器性能也就决定了电动汽车的性能。随着微电子控制单元的快速发展,智能化控制技术得到不断提升与应用。目前,电动汽车控制器的功能越来越全面,基本能够满足电动汽车的控制需求。智能控制器也成为了提升电动汽车性能,推动“智能化”的关键。智能控制器主要包括整车控制系统、电机控制器、信息检测与通信接口等部分。
一、整车控制系统设计
1.1驱动控制系统功能需求分析
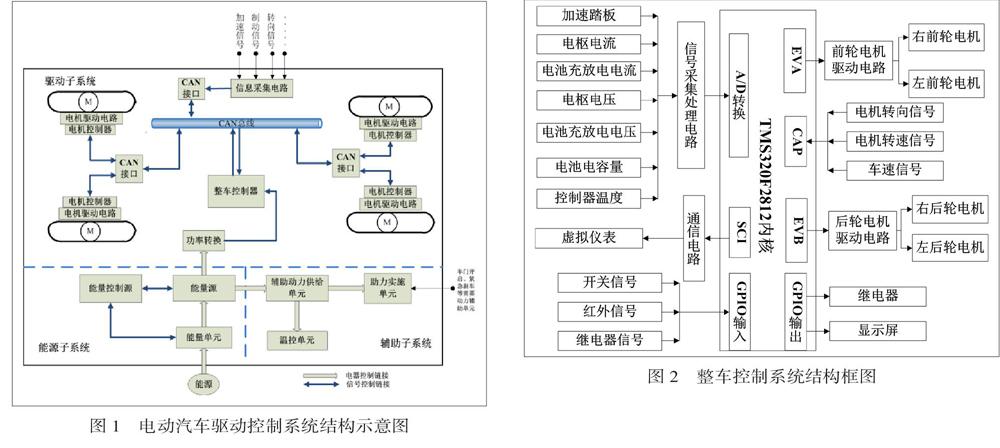
电动汽车驱动控制系统是电动汽车的心脏,驱动系统的任务是在驾驶员的控制下,高效率地将蓄电池的能量转化为车轮的动能,或者将车轮的动能反馈到蓄电池中。电动汽车驱动控制系统从功能上来看主要包括:驱动控制、能源控制和辅助控制三个子系统,其结构组成如图1所示。
对电动汽车驱动控制系统的性能要求主要考虑驾驶体验、车辆性能以及能源系统性能等三个方面。电动汽车驱动控制系统的性能确定需要综合考虑以上三个方面,并结合整体包装、经济性等方面从系统层面进行优化,其目的在于能够实现各子系统之间的相互配合以及系统整体的匹配。
1.2基于TMS320F2812的整车控制系统设计
为了克服现有单电机电动汽车整车控制器不能满足四轮独立驱动电动汽车的控制要求以及不支持信息交互、通信互联等功能拓展的缺点,本文设计了一种四轮独立驱动电动汽车整车控制系统,不仅能满足四轮独立驱动电动汽车协调控制四个驱动电机的整车控制要求,而且通过本控制系统提供的标准通讯端口与外部无线网络模块通讯实现信息交互、通信互联等功能,便于实现车-车通信、车-路通信等。
通过性能分析以及实际需求,整车控制系统以TMS 320F2812芯片作为内核。电动汽车直流无刷电机速度控制所需的PWM信号产生、磁极位置侦测、切换法则、速度估测、开环及闭环控制等,都在该DSP芯片通过软件的方式实现。根据功能需求,实验车上的整车控制单元主要包括A/D采样模块、DSP主控模块、PWM脉冲信号输出模块、电源模块、标准通讯端口模块及备用端口模块。
二、智能电机控制器设计
基于多MCU的电动汽车智能控制器设计包括硬件系统和软件系统两部分,首先对硬件系统进行了设计并实现,接着在硬件上对软件系统进行了调试。硬件系统设计的好坏直接关系到控制器的运行稳定性和可扩展性
2.1基于MC33035的驱动电路设计
无刷直流电机(BLDC)具有使用寿命长,免维护等特点,是目前最普及的电动汽车用动力源之一。相比有刷电机控制器,无刷直流电机的控制器设计却要复杂,一方面是因为无刷直流电机使用直流电且无换向用的电刷,其换向控制相对有刷电机要复杂许多;另一方面由于电动汽车负载极不稳定,又使用电池作电源;因此控制器自身的保护及对电机,电源的保护均对控制器的设计提出了更多要求。
基于MC33035设计的无刷直流电机控制器能够控制无刷直流轮毂电机的正反转、转速和刹车,可在此电机控制器基础上实现电子差速控制,能够通过数字电位器将数字命令转化为模拟量控制轮毂电机转速。该单元主要包括电源模块、无刷直流电机控制芯片主控电路以及电机驱动电路三部分。
2.2基于Atmega-16的电流检测与驱动方式切换控制器设计
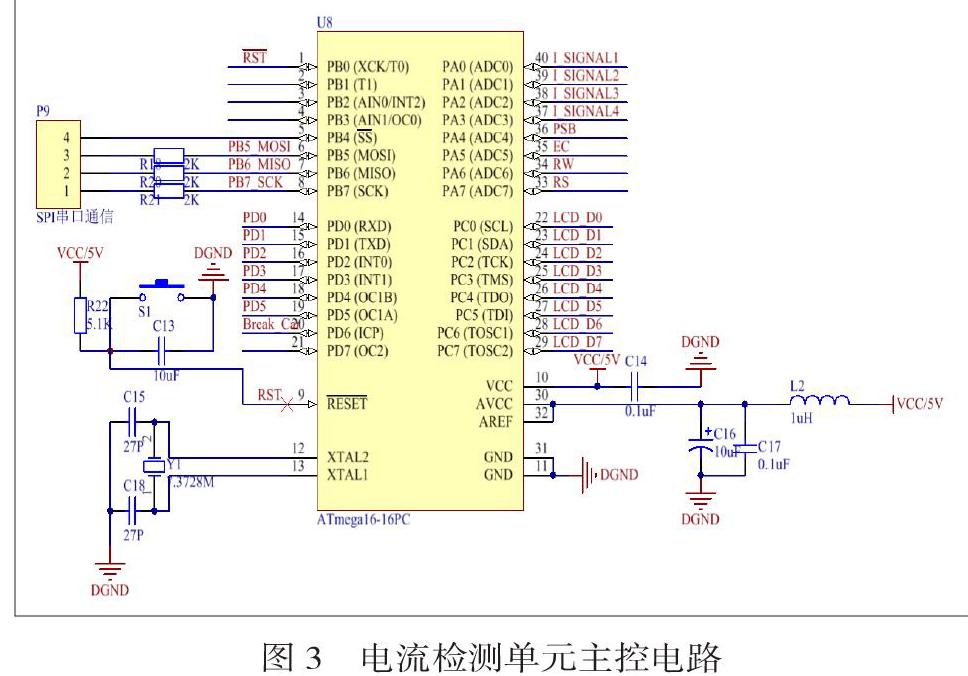
ATmega16是基于增强的AVR RISC结构的低功耗8位CMOS微控制器。由于其先进的指令集以及单时钟周期指令执行时间,ATmega16的数据吞吐率高达1MIPS/MHz。电流检测单元的主控芯片采用Atmega16单片机,其引脚的连接如图3所示。
在此基础上,要实现对轮毂电机的驱动状态进行有效地控制,则需要给轮毂电机控制器的使能端输入控制信号,当电动汽车上的电机控制器输入12V的使能控制信号时,轮毂电机将空转,无驱动力作用;当轮毂电机控制器的使能控制端无电压输入时,轮毂电机控制器则将根据踏板信号的模拟电压以一定速度驱动轮毂电机运转。可见,控制信号可以是12V开关型的,要想实现驱动方式的自动切换,可采用电压比较的方法来实现。
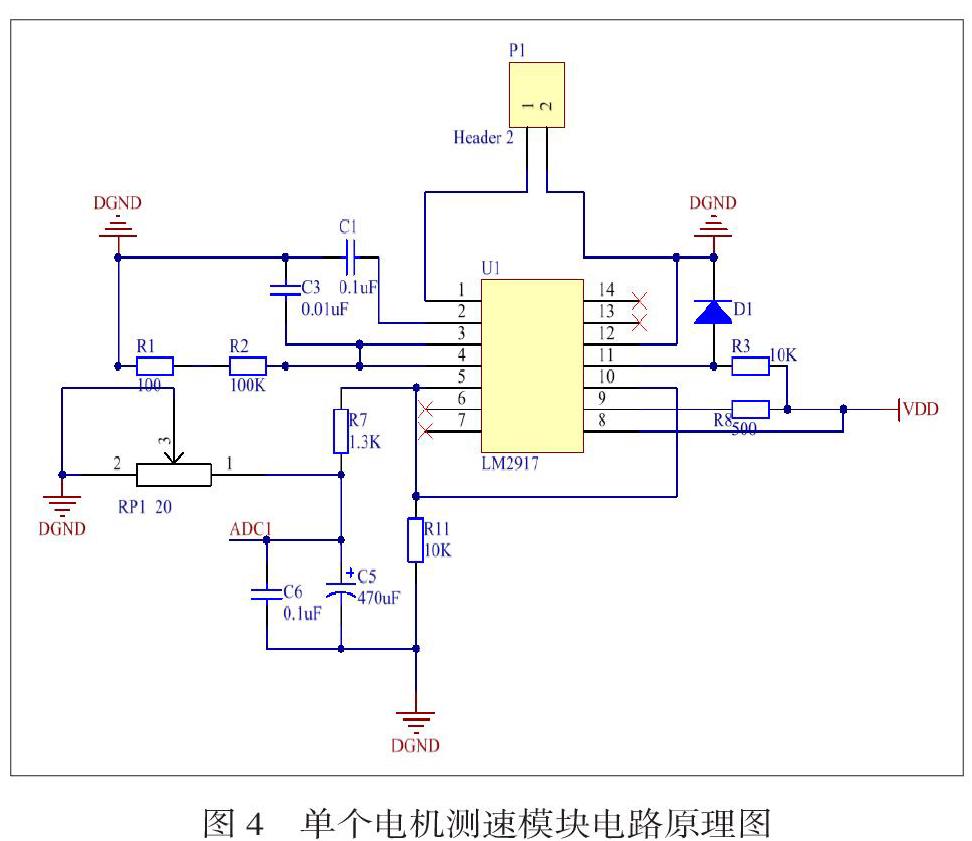
为更精确地对电动汽车轮毂电机转速控制和实现电机的闭环控制,我们就需要对电机的转速进行提取。轮毂电机带有三个霍尔传感器用于检测当前电机转子的位置,电机控制器根据当前转子位置输出相应的驱动信号,每一相霍尔传感器所输出信号都是高低变化的电平,速度提取单元就是通过检测该信号的频率计算出轮毂电机的转速,单个电机测速原理如图4所示。
三、结论
在电动汽车领域中,电动汽车控制器的发展占据着非常重要的地位,随着电动汽车的推广与使用,更先进且智能化的控制系统将不断应运而生,基于多MCU的控制结构体系将会是一种有效的解决方案。可以在电动汽车上被广泛有效地应用,因此本设计具有较高的使用价值。本文所设计的控制器具有以下特点:
(1)适用于四轮轮式独立驱动电动汽车,具有丰富的系统功能,不仅为电动汽车提供了稳定的驾驶性能,还同时提供了许多智能化的辅助功能。
(2)以嵌入式MCU来设计控制器,不仅控制性能好、体积小、效率高,而且对系统后期的调试提供便利。
参 考 文 献
[1]李乐.四轮独立驅动电动汽车控制系统的设计[D].武汉:武汉理工大学:2010.
[2]李乐,李波等.带霍尔式位置传感器BLDCM控制器设计[J].自动技术与应用,2010
[3]傅周兴,王秋妍等.基于DSP的电动汽车轮毂电机控制器设计[J].电气易用,2007,6(26):70-73.
