车载异步电动机静止参数辨识方法研究
2019-03-29林巨广汪雷鸣吴仕统
林巨广,汪雷鸣,吴仕统,刘 健
(合肥工业大学,合肥 230009)
0 引 言
近几年来,新能源汽车迎来了蓬勃发展时期。推动新能源汽车发展,能够减少国家石油对外依赖,保障国家能源安全,对促进国内汽车工业实现弯道超车具有重要意义。新能源汽车电驱动系统的研究也越来越受到人们的重视。在国内,目前主流的电驱动系统主要分为永磁同步电动机电驱动系统和异步电动机电驱动系统。与永磁同步电动机相比,异步电动机具有结构简单、成本低廉、性能稳定、不会退磁、极限转速更高等优点,在国家加强稀土资源监管和稀土资源成本提高的当下,具有很好的应用前景。
常见的异步电动机控制算法有v/f控制算法、矢量控制算法。其中,空间矢量控制算法能够让异步电动机获得与直流电机一样的动、静态性能,因而广泛应用于新能源汽车的异步电动机控制中。但空间矢量控制算法的磁场定向和磁链计算都需要电机参数的参与,如果电机参数精度不够,矢量控制将无法满足控制需求[1]。因此,精确辨识电机参数就成了实现矢量控制的前提。
传统的异步电动机参数辨识方法是通过直流实验来辨识电机定子电阻,通过空载实验来辨识互感,通过堵转实验来获取转子电阻和定、转子漏感。这种方法相对复杂,需要人工进行堵转和接线,并且在电机安置好后难以实现。考虑到新能源汽车驱动系统都有配套的控制器,有必要研究一种在静止状态下利用控制器自动辨识异步电动机参数的方法。
为实现异步电动机静止状态下的参数辨识,国内外学者提出了很多参数离线辨识方法。文献[2]提出通过给定特定的定子励磁电流、转矩电流和磁链角,经过矢量坐标变换产生直流、单相和三相电源,完成异步电动机的直流实验、单相电源堵转实验以及开路实验,这种方法虽然能够减小由死区、三相电阻不对称等因素造成的辨识误差,但是空载实验无法让电机保持完全静止。文献[3]提出了依次用两种不同频率的正弦信号激励异步电动机,完成电机参数辨识的方法,并分析了在此激励下,反Γ型等效电路辨识的电机参数精度比 T 型和Γ型等效电路高。这种方法的定、转子电阻和漏感的辨识精度较高,但由于高频交流激励使互感感抗远大于定、转子电阻值,造成计算过程中电流随频率变化不敏感,致使互感的辨识效果很差。文献[4]详细阐述了基于递推最小二乘算法的电机参数离线辨识的具体实现,通过简化电机数学模型,采用改进欧拉数值解法,求解巴特沃思数字滤波状态方程,进而提高运算精度。实验结果表明所提方法稳定性良好,辨识的准确性较高。但是这种方法需要额外设计硬件滤波电路和伪随机白噪声序列,不具有普遍性。
本文在反Γ型电路的基础上,通过分析逆变器非线性特性,添加直流分量的单相实验,完成异步电动机的参数辨识。最后,对一台峰值功率为60 kW的新能源汽车用异步电动机进行了参数辨识,以验证辨识算法的实用性和有效性。
1 异步电动机参数辨识模型
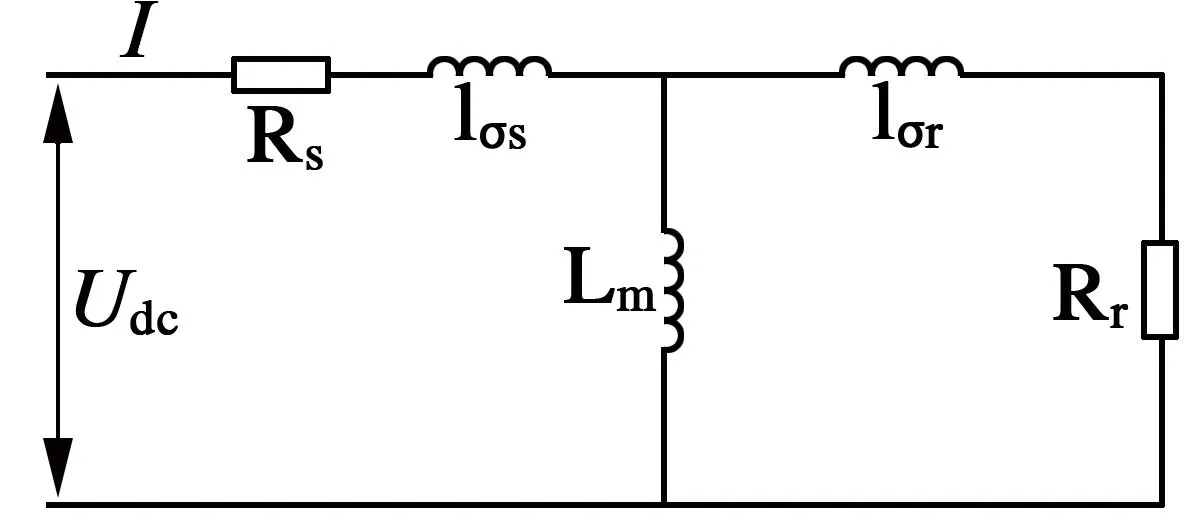
异步电动机常用的等效电路模型有T型等效电路,Γ型等效电路和反Γ型等效电路,如图1所示。
(a) T型等效电路

(b) Γ型型等效电路

(c) 反Γ型等效电路
图1异步电动机三种等效电路图
文献[3]证实了在单相实验下反Γ型等效电路具有更高的参数辨识精度,本文采用反Γ型等效电路对异步电动机进行分析。根据反Γ型等效电路与T型等效电路,推导出两者的参数关系如下:
(1)
2 单相实验原理
异步电动机参数主要是指定子电阻、转子电阻、电机漏感和互感,本文通过单相实验实现辨识异步电动机的所有参数。单相实验电路图如图2所示。
异步电动机采用逆变器供电。给定Uα,Uβ,使直流母线电压经过空间矢量变换转换为需要的电压。为保证异步电动机的三相参数都能参与辨识,通过给定Uβ=0使其中两相短接。此时异步电动机三相当于两相并联并与最后一相串联,这样测得的参数数值为实际参数数值的1.5倍。再调整磁链定向角依次为0,120°,240°,求取三相不同组合后的参数,取平均值,尽量减少三相不平衡带来的影响。令:
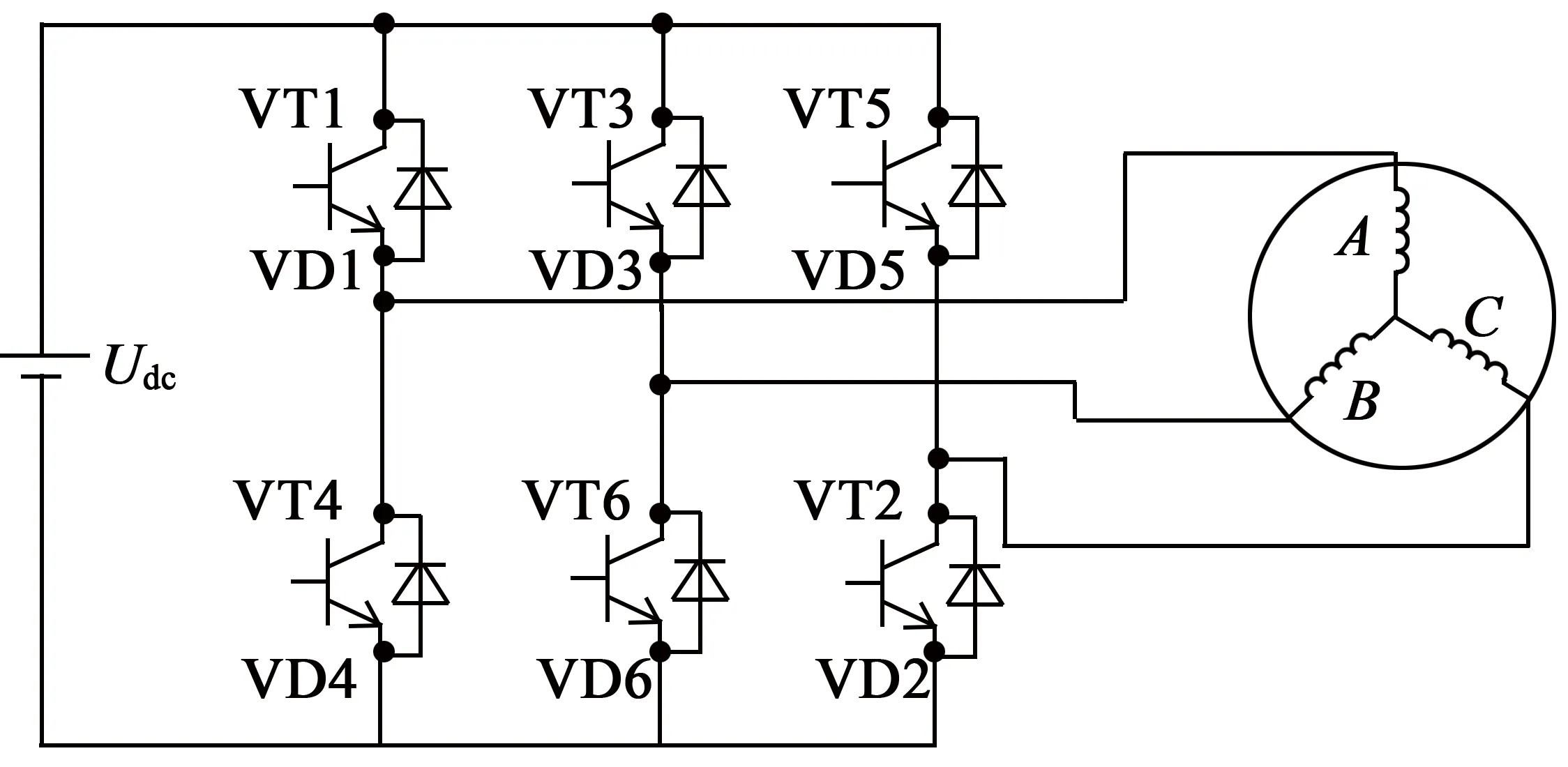
图2单相实验电路图
(2)
此时,B,C两相短接,A,B两相接入交流电。
3 电压重构与误差分析
由于市面上控制器大多不配有电压传感器,本文中的定子侧电压通过PWM占空比重构的方式获得,理论上A,B,C三相的一周期内等效电压:
(3)
式中:mA,mB,mC为逆变器的开关管理论占空比;Udc为直流母线电压。在单相实验中,B,C相开关管状态始终保持一致。所以式(3)可化简:
(4)

但是实际上重构的电压与实际电压存在着偏差,文献[5]指出,引起输出电压误差的主要因素包括功率器件的开关延迟时间,死区时间,IGBT和二极管的导通压降,寄生电容引起的时序混乱以及硬件延迟。
为了减小误差,需要对重构电压进行补偿。忽略时序混乱和硬件延迟,文献[6]给出了一个PWM载波周期内方波交流信号激励下单相补偿电压值:
(Udi-UIGBT+Udc)fC(TD-toff)(6)


理论上,这种补偿方式能够很好地补偿死区时间、开关延迟时间引起的电压误差和IGBT及反并联二极管上的导通压降。但是,由于逆变器的非线性特性,在电流过零点时会产生零电流钳位效应,造成过零点附近的电压畸变严重,并且电流极性很难判断,因此不能正确地补偿电压。为了消除零电流钳位效应,文献[6]提出了一种基于电流相角逆推计算的有效的在线死区补偿技术,但是这种技术在低频下有较大的误差。因此本文采用更为简单有效的方式,即添加直流分量 ,确保电路中的电流瞬时值在任何时刻始终大于零,这样就避免了零电流钳位效应的影响。
但是实际上,定子侧的电压是母线电压经过逆变器逆变的。通过指定给定电压可以决定定子侧电压直流分量幅值和交流电压分量的幅值,但由于转子绕转只能在变化的电压下感生电流,指定的两个电压分量的幅值能产生多大的对应电流并不能确定。考虑到计算交流分量电流时需要额外将感抗考虑进去,因此可以得出直流分量电压的幅值对电流分量来说更为敏感的结论。如何确定交、直流电压分量的幅值是添加直流分量的难点,本文给出了详细的确定交、直流分量幅值的方法。
4 参数辨识
4.1 定子电阻辨识
定子电阻辨识通过通入直流进行单相实验来实现。令:
(8)
此时,B,C两相短接,A,B两相接入直流电。为了减小功率管导通压降带来的误差,对异步电动机依次通入两次不同的直流电流。假设IGBT和反并联二极管的非线性误差为Δu,则有:
当两次通入直流电开关管的压降不变时,可以通过求斜率的方式消除误差。求取的定子电阻值:
文献[7]给出了IGBT和二极管压降与电流的关系曲线。在该文献中,当负载电流ix>3 A时,IGBT和二极管压降变化非常小。不同型号的IGBT和二极管压降与相电流关系曲线虽然不完全相同,但是当电流足够大时,它们的压降都近似为常数。对于车载异步电动机来说,很小的给定电压就能激励比较大的电流,所以在直流实验中可以将开关管的压降看作常值。
直流实验时,给定电压太小会导致占空比过小,使得死区时间和开关管延时对电压的影响增大,从而引起定子侧电压有一定程度上的畸变,造成实际电压的误差。所以在保证电流不超过限幅值的条件下给定电压应尽可能得大。实验中,设置门槛电流,在限幅电流到门槛电流之间留有一定的裕量,电压从5 V开始逐渐往上增加,每次增加0.1 V,同时,对电流进行采样信号,当电流值超过门槛电流时,不再增加电压幅值。选择最后两组数据,按照式(10)进行计算。电压UT通过给定电压Uref获得:
UT=Uref-UdcfC(TD-toff)(11)
需要注意的是,为了避免温升对电阻的影响,每次通电时间不应过长。每个电压幅值通电2 s,冷却1 s后,再进行下次通电。
4.2 转子电阻、漏感及互感辨识
转子电阻、漏感、互感辨识通过两次单相实验实现。文献[3]中给出了转子电阻,漏感和互感的计算公式:
(12)
式中:I1为线电流;V1为异步电动机定子侧电压,V1通过占空比重构并补偿的方式获取。
为避免零电流钳位效应,使补偿后的结果更加准确,在通入交流电辨识参数过程中添加直流分量,使激励生成的电流信号总是大于0。同时,添加的直流分量能够充分的励磁线圈绕组,使测量的互感值为车载异步电动机正常运行时的互感值。所以在激励信号的选择上,直流分量幅值被设定为直流实验中靠后的数值,交流分量幅值设定需满足小于直流分量。此外,考虑到转子电阻受集肤效应的影响,为了测出车载电机在正常运行时的转子电阻值,选择在额定转速下的频率附近进行辨识,并保证两次交流分量的频率相差不大。
在向异步电动机注入两次带有直流分量的不同频率的交流正弦电压信号后,采集电流值iA(t)与发送的占空比D(t)。截取采集的电流值稳定部分进行快速傅里叶(FFT)变换,获取电流值的零频分量以及基波幅值和相角。再将每次采样的电流值与零频分量相减,判断其正负作为A相电流的极性代入式(13)中获得补偿后的电压,Dref为DSP设置的载波幅值。
Udc)fC(TD-toff)]·sgn(iA) (13)
按截取的电流值长度截取补偿后的电压并进行FFT变换,获取重构电压的基波幅值和相角,将电流和重构电压的基波幅值和相角代入式(12)中进行运算。
5 实验验证
实验平台是以DSP芯片TMS570LS1115为核心的车载控制器,逆变器使用的IGBT型号为SKIM606GD066HD。采用上述方法编写控制程序。待测电机为一款小型新能源汽车车载异步电动机,峰值功率60 kW,额定电压110 V,极限转速7 000 r/min,电机极对数为2。实验中直流母线电压为145 V,IGBT开关频率10 kHz,死区时间2 μs,控制器电流限幅为650 A,设置的PWM占空比比较值为4 000。根据SKIM606GD066HD的参考文档,电流在400~600 A之间,UIGBT的典型值为1.45 V,Udi的典型值为1.6 V。设置的门槛电流为600 A。
直流实验时,电流加到6.4 V时超过门槛电流。所以选择给定电压5.8~6.3 V,每两组之间进行计算,求取平均值。
单相实验选择直流分量为6 V,交流分量幅值为3 V。Uα=6+3sin(ωt)。一般异步电动机的额定转速为极限转速的40%左右,所以选择频率为80 Hz,84 Hz进行测试。
按照本文的方法,异步电动机参数辨识结果如表1所示。

表1 异步电动机参数辨识结果
由表1可知,测量结果的最大误差在5%左右,说明本文的添加直流分量后再补偿的方法是有效的。
单相实验下,交流信号频率为80 Hz和84 Hz时,异步电动机的电流波形如图3所示,占空比波形如图4所示。

(a) 80 Hz电流波形图
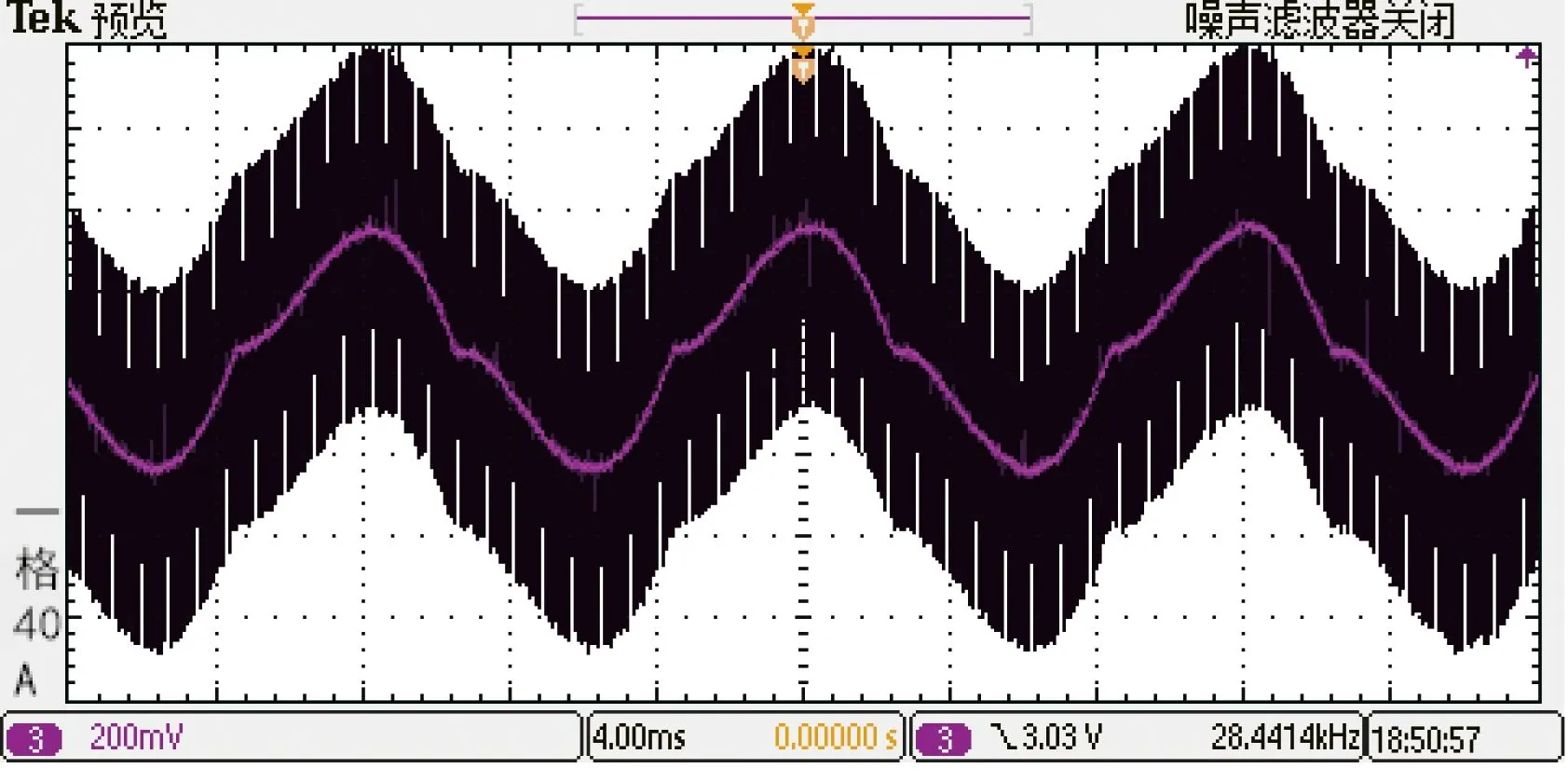
(b) 84 Hz电流波形图
图3单相试实验下电流波形图
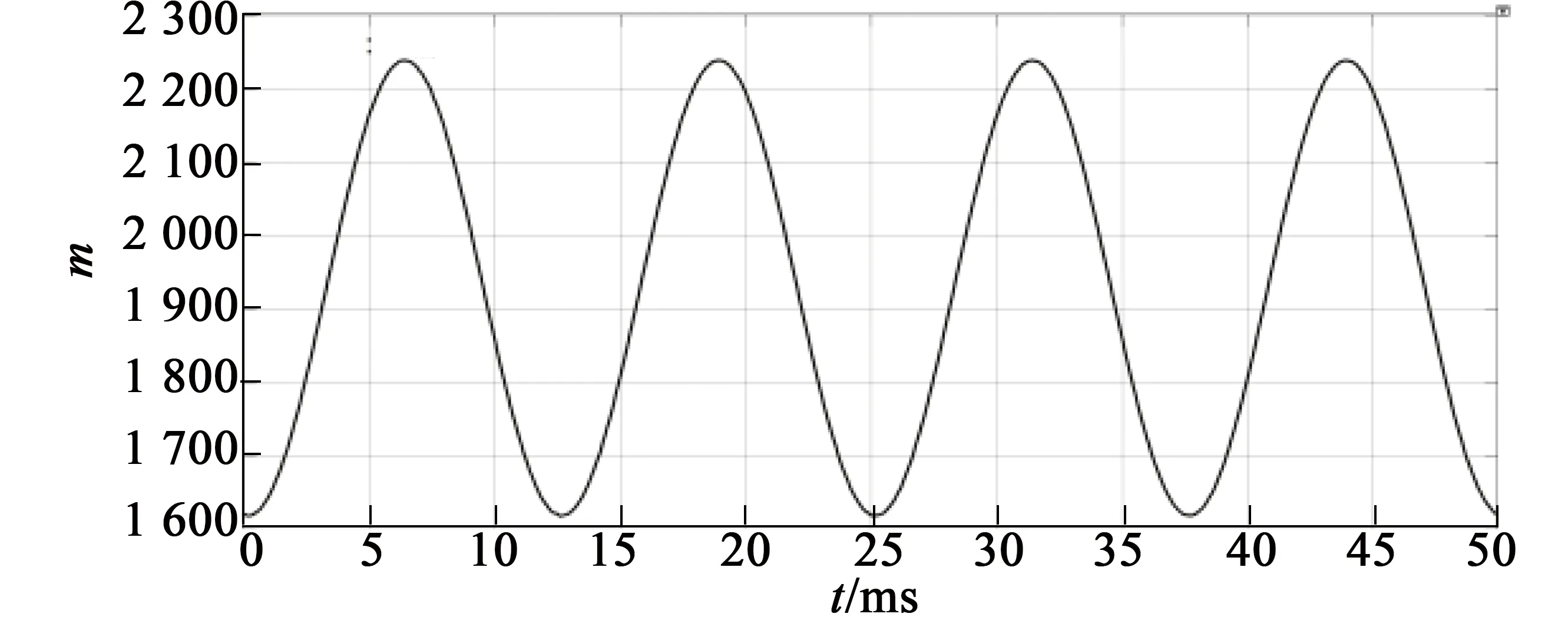
(a) 80 Hz占空比波形(比较值为4 000)

(b) 84 Hz占空比波形(比较值为4 000)
图4单相试实验下占空比波形
6 结 语
本文对新能源汽车车载异步电动机静止状态下的参数辨识进行了研究,分析了逆变器的非线性特性和电压重构的误差,在单相实验的基础上,提出在交流信号中添加直流分量的方法避免了零电流钳位效应,更好地补偿了逆变器非线性特性引起的误差。同时直流分量的引入也保证了异步电动机能够充分励磁,获取的是车载异步电动机正常运行状态下的互感。最后在一台峰值功率为60 kW的车载异步电动机上进行了实验验证,验证了本文方法的有效性与可行性。该参数辨识方法只需要汽车电源与车载控制器就能够实现,具有较强的通用性。
