基于无人机遥感影像的覆膜农田面积及分布提取方法
2019-03-28朱秀芳李石波肖国峰
朱秀芳,李石波,肖国峰
基于无人机遥感影像的覆膜农田面积及分布提取方法
朱秀芳1,2,李石波3,肖国峰2
(1. 北京师范大学北京市陆表遥感数据产品工程技术研究中心,北京 100875;2. 北京师范大学地理科学学部遥感科学与工程研究院,北京 100875; 3. 中国地质大学土地科学技术学院,北京 100083)
针对基于无人机遥感的覆膜农田识别研究甚少的现状,该文以云南省昭通市鲁甸县为研究区,获取了研究区中地表类型复杂程度不同的2幅航空影像(复杂区影像和简单区影像)作为试验数据,利用灰度共生矩阵对原始航片影像进行纹理特征提取并选择纹理特征最佳提取参数;然后基于随机森林算法进行纹理特征重要性评价,优选纹理特征,结合原始数据进行最大似然初步分类;运用众数分析进行分类后处理;最后结合图像形态学算法与面积阈值分割法提取出了最终的覆膜农田面积及分布。通过试验结果发现,依据该文提出的方法,复杂区和简单区覆膜农田识别的总体精度、Kappa系数、产品精度、用户精度和面积误差分别达到了94.84%、0.89、92.48%、93.39%、0.38%和96.74%、0.93、97.39%、94.63%、1.95%。该文提出的融合监督分类和图像形态学算法的覆膜农田提取方法可以简单、快速的将地膜连成块,形成覆膜农田对象,进而通过面积阈值分割法获取高精度的覆膜农田分布信息。该方法可以为精准覆膜农田识别算法的发展提供参考。
无人机;算法;提取;覆膜农田;纹理特征;最大似然分类;阈值分割
0 引 言
随着农业技术的发展,农田覆膜技术因其能够改善土壤理化性质、促进作物生长等优点得到了广泛应用[1],然而大量地膜的使用势必会给环境造成严重污染。覆膜农田面积和空间分布的精准获取可为相关部门掌握农田地膜覆盖情况、优化耕作制度、预防地膜污染等提供管理决策重要依据。因此地膜覆盖农田遥感监测逐渐成为了农业土地资源遥感的热点方向[2]。
目前,基于卫星遥感的覆膜农田识别,从数据源的角度来说,包括基于可见光遥感影像、基于高光谱影像、基于雷达影像以及复合多源遥感数据提取的方法。基于中分辨率可见光遥感影像的覆膜农田识别一般围绕光谱特征、指数特征以及纹理特征组合,使用最大似然、决策树、支持向量机等方法对影像进行分类,获取覆膜农田信息。例如,Picuno等基于Landsat5 和Landsat7 的影像利用平行六面体分类方法进行了意大利南部琼斯海附近的覆膜农田分布提取[3]。Lanorte等基于Landsat8影像利用支持向量机分类方法进行了意大利南部阿普利亚地区覆膜农田的提取[4]。Hasituya等[5-6]在河北冀州和宁夏固原先后使用了单时相和多时相的Landsat8进行覆膜农田监测,指出基于多时相数据监测的精度更高。沙先丽[7]利用Landsat TM数据,以影像光谱特征、指数特征和纹理特征为基础,构建决策树对新疆覆膜棉区进行提取,分类总体精度达到90%以上。李佳雨等[8]基于资源三号和Landsat卫星融合数据,采用面向对象随机森林分类方法对甘肃中部地区进行了地膜提取,总体分类精度和Kappa系数分别达到了90.2%和0.877。高梦婕等以GF2遥感影像为数据源,对比分析了随机森林、CART决策树、支持向量机3种分类器识别塑料大棚的精度,指出随机森林法识别精度最高[9]。
基于低分辨率可见光影像的覆膜农田识别主要使用的数据源是MODIS影像。例如,杭丹维利用MODIS影像,通过亚像元制图的方法进行了新疆维吾尔自治区天山南麓阿克苏河流域南部的绿洲覆膜农田的提取[10]。Lu等基于时序 MODIS NDVI 数据利用阈值法成功提取了新疆地膜覆盖的棉花空间分布[11]。此外,Levin等通过对多种覆膜材料350~2 500 nm之间光谱辐射进行测量和分析,指出白色和透明塑料膜在1 218、1 732和2 313 nm有强吸收特性,在此基础上利用超光谱AISA-ES影像进行地膜识别试验,进一步发现波长在1 732 nm附近识别效果最好,精度在90%以上[12]。张航[13]基于高光谱影像,采用支持向量机分类器对皮棉中地膜进行识别,最终识别精度达到了97.71%。王海慧探讨了农膜的偏振特征信息[14]。Hasituya等采用全极化Radarsat 2数据在河北冀州市和宁夏固原市开展覆膜农田遥感识别研究,发现单纯依赖雷达数据识别精度达不到80%[15]。
近几年,无人机遥感凭借机动性强、速度快和经济等特点已经成为热门研究课题[16],无人机遥感逐渐从理论研究层面转化到了实际应用[17-21]。然而,基于无人机遥感的覆膜农田识别研究甚少。孙钰等[22]提出了一种基于深度学习的大棚及覆膜农田无人机航拍监测方法,对于测试区域的整体正确率达到了97%,但基于深度学习的地物覆盖类型识别方法在使用前需要大量数据进行训练,导致了前期工作量增大。本文基于高分辨率的RGB航空影像,提出了一种融合监督分类和图像形态学算法的覆膜农田提取方法,并以云南省昭通市鲁甸县为研究区进行了算法的应用和验证,为小区域、精准覆膜农田识别算法的发展提供参考。
1 研究区及数据准备
1.1 研究区概况
本文的研究区位于云南省昭通市下辖的鲁甸县,是优质烤烟主产县。年均气温12.1 ℃,年无霜期220 d,年均降水量900 mm。其中山区占总面积的87.9%。主要作物包括冬小麦、春玉米、夏玉米、中稻和烤烟。
1.2 数据获取与预处理
试验数据为2018年5月4日进行航拍获取的无人机影像,航拍地点为云南省昭通市鲁甸县大水塘村,覆盖面积约为18.5 km2。所使用的无人机为DM-150经典无人机,该机空机质量10 kg,最大飞行速度为150 km/h,正常巡航速度为110 km/h,巡逻速度80 km/h,最大任务载荷为6 kg,续航时间为3 h,升限5 000 m,航程最大300 km。搭载的相机为索尼ILCE-7R,传感器型号为Exmor CMOS,传感器尺寸为35.9 mm×24 mm(35mm全画幅),镜头型号为索尼 Sonnar T*FE 35 mm F2.8 ZA(SEL35F28Z),有效像素为3 640万,影像尺寸7 360× 4 912,像元尺寸4.9m×4.9m,等效焦距为35 m。航拍时高度为1 285 m,旁向重叠率30%,航向重叠率70%,所获得影像地面分辨率为0.15 m。影像处理的主要内容是对无人机获取的影像进行后期的处理,包括数据质量检查、影像特征点提取、影像匹配、空中三角测量与区域网平差、生成数字高程模型(digital elevation model,DEM)、正射校正生成数字正射影像(digital orthophoto map,DOM)和影像拼接等。
研究区内的地物类型主要包含植被、不透水层(建筑物与硬化道路)、裸地和地膜。覆膜的作物主要有烤烟和春玉米,所覆盖的地膜有白色和黑色2种。白色的地膜容易和浅色的不透水层(如白色的房顶)混分,而黑色的地膜容易和深色的不透水层(如黑灰色的房顶)混分。裸地主要是暂时没有播种的农田,其中部分裸地中有往年的地膜残留物,容易和当年的地膜混分。为了测试本文所提出方法的适用性,特从研究区中选取了2幅影像进行测试(图1)。2幅影像中地物的复杂程度不同,为方便后文的称述,本文简单的称其为复杂区影像和简单区影像。复杂区影像中地物类型主要包括植被、不透水层(建筑物与硬化道路),地膜(以黑膜为主,间有少量白膜),裸地(大部分含有往年的地膜残留);简单区影像中的地物类型和复杂区一致,但是简单区的地膜只有黑膜,裸地中无残膜。完整黑色地膜和完整白色地膜呈条状,而残膜在地块中呈破碎状,并且在地块中密度较小。白色残膜和黑色残膜与完整白色地膜和完整黑色地膜灰度值(digital number,DN)特征相似,白膜DN值均高于黑膜DN值。

注:复杂区影像中地物类型包括植被、不透水层、地膜、裸地;简单区影像中地物类型和复杂区一致,但是简单区的地膜只有黑膜,裸地中无残膜。
2 技术路线与研究方法
2.1 研究方案
本文旨在提取覆膜农田,即当季覆盖了地膜的农田。覆膜农田的面积是地块中地膜和裸地的面积的总和,而不仅仅是地膜的面积,而且不包含以往生长季残留的地膜。针对该研究目标,本文设计了如图2所示的技术路线,主要包括如下步骤:1)计算原始RGB航片影像灰度共生矩阵,得到了24个纹理特征;2)基于随机森林算法进行纹理特征重要性评价,优选纹理特征,结合原始数据进行最大似然分类,得到地膜的初步分类结果;3)运用Majority分析进行分类后处理,去掉残膜等噪声图斑;4)通过图像形态学算法将条状地膜连成片,得到覆膜农田,提取图像上的图斑对象,设定图斑面积阈值提取出覆膜农田空间分布;5)结合原始航片影像并进行目视比对,进行二次形态学算法处理,获取最终的覆膜农田空间分布;6)通过误差矩阵和面积误差对覆膜农田识别结果进行精度验证。
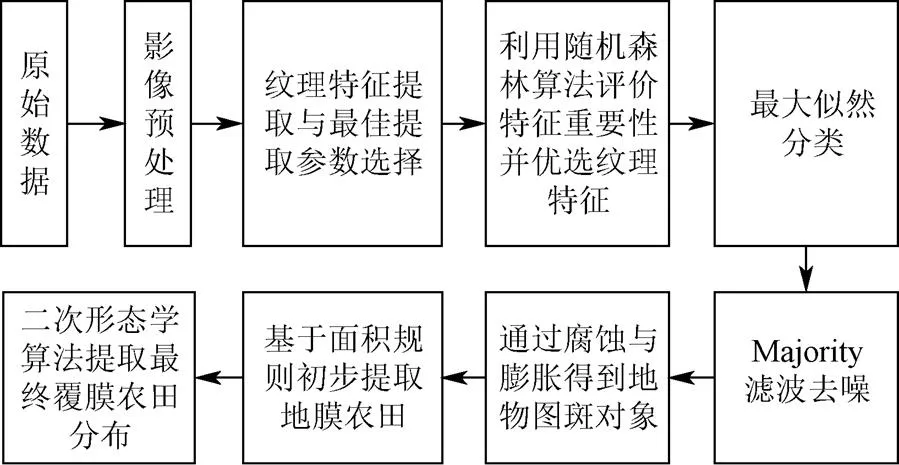
图2 技术路线图
2.2 特征生成
2.2.1 灰度共生矩阵纹理特征提取
灰度共生矩阵[23]是通过计算图像灰度级之间条件概率密度函数来提取纹理特征的一种统计分析方法(下文简称为GLCM)。本文选取了应用较广泛的均值、方差、协同性、对比度、相异性、信息熵、二阶矩和相关度8种纹理测度进行纹理特征分析,并分别从3×3、5×5、7×7、9×9、11×11、13×13、15×15共7个窗口,0、45°、90°、135°4个方向,1、2、3共3个步长,合计84种不同参数组合对原始影像提取了84组不同的纹理特征,讨论不同参数组合对分类结果的影响,选取最佳提取参数。最终基于纹理特征最佳提取参数对原始航片影像进行纹理特征提取。由于原始航片数据有R、G、B 3种图像灰度信息,因此每组纹理特征中包含24个波段信息。
2.2.2 最佳纹理组合选取
纹理特征生成之后需要对8种纹理特征进行筛选,识别出对分类结果影响较大的纹理特征。本文利用随机森林算法进行纹理特征重要性评价,并逐一添加对分类结果影响大的特征进行精度验证,选择分类精度最高时对应的波段组合作为最佳波段组合。随机森林特征重要性评价的基本原理为基于已创建样本库进行随机森林决策树的建立,每一棵决策树对应一个袋外数据误差,然后随机向袋外样本数据中某一特征变量添加噪声,并计算加入噪声后对应的袋外数据误差。若某个特征变量加入噪声后导致袋外的准确率大大降低,则说明该特征变量对样本分类结果影像较大,即该特征变量重要性较高。
2.3 最大似然分类与分类后处理
将基于随机森林算法选取的波段组合结合原始航片影像进行最大似然分类(地物类型包括:植被、不透水层,地膜和裸地)得到初步分类结果,然后进行分类后处理(Majority分析),对分类结果中面积很小的斑块进行剔除或重分类。Majority分析先定义一个变换核尺寸,用变换核中占主要地位(像元素最多)的像元类别代替中心像元的类别。
2.4 基于图像形态学算法和面积阈值分割法的覆膜农田空间分布提取
采用图像形态学算法(腐蚀、膨胀、开运算和闭运算)对初步分类结果进行处理,将条状地膜连成片,得到覆膜农田对象,同时将伪地膜信息与覆膜农田分离开来,然后基于面积阈值分割法将破碎状残膜与伪地膜信息剔除,获取覆膜农田空间分布。
2.5 二次形态学算法处理
由于提取覆膜农田空间分布时采用了图像形态学算法(腐蚀运算和膨胀运算),导致了提取出来的覆膜农田大小与实际覆膜农田面积大小并不一致,故本文采用二次形态学算法处理方法。二次形态学算法处理是指通过使用膨胀运算或闭运算将覆膜农田形成完整块状对象,再使用腐蚀运算结合目视比对原始影像的方法,将覆膜农田恢复至实际覆膜农田大小。
2.6 精度验证
参考已有文献[24-25],本文选取了总体精度、Kappa系数、产品精度、用户精度和面积误差5个指标对识别的覆膜农田进行比较和分析。其中总体精度、Kappa系数反映了识别出的覆膜农田空间分布位置的准确度;产品精度反映了覆膜农田漏分程度;用户精度反映了覆膜农田错分程度;面积误差是指覆膜农田提取面积与真实覆膜农田面积差值的绝对值和真实覆膜农田面积的比值,反映了最终提取的覆膜农田面积相比真实覆膜农田面积的误差大小。精度验证的参考数据为人工目视数字化的覆膜农田空间分布数据。
3 研究结果
3.1 GLCM最佳参数选取
本文基于复杂区分别从不同窗口、方向、步长对原始航片影像提取了84个不同的纹理特征组合。84种不同纹理特征组合分别结合原始航片影像进行最大似然分类,并从总体精度、地膜用户精度和地膜制图精度进行分析(图3)。由图3可知,地膜制图精度在不同纹理特征提取参数下均能够保持较高水平(90%以上),总体精度和地膜用户精度随着窗口大小的增加呈上升趋势,总体精度约从80%上升至90%以上,地膜用户精度约从40%上升至90%以上。为了同时兼顾地膜的分类精度和影像初步分类的总体精度,本文将总体精度、地膜用户精度和地膜制图精度之和最大对应的纹理特征提取参数作为最佳提取参数,最终确定纹理特征最佳提取参数是:窗口大小为15×15,方向为0,步长为2。由于本试验中简单区和复杂区纹理特征十分相似,因此同样将窗口大小15×15,方向0,步长2作为简单区纹理特征最佳提取参数。
3.2 最优纹理特征组合
基于纹理特征最佳提取参数对简单区和复杂区进行纹理特征提取后,利用随机森林算法分别对2组纹理特征建立模型并进行重要性评价,按照重要性排序并逐一添加重要性大的特征进行精度验证。默认参数下,复杂区和简单区2个模型的袋外分数分别达到了0.979 4和0.973 3。由于默认参数下,2个袋外分数已经较高,因此本文在默认参数下建立随机森林模型并对2组纹理特征进行重要性评价(图4a和图4b)。从图4中可以看出,复杂区和简单区重要性最高的前3个特征波段均为b17(蓝色均值)、b1(红色均值)和b9(绿色均值),3个波段重要性之和分别达到了0.527 0,0.536 6。逐一添加特征进行精度验证的结果如图5a和图5b所示。由图5可知,从结果中可以看出,复杂区和简单区地膜产品精度变化波动较小并且精度均保持在90%以上。地膜用户精度变化波动较大,随着特征数量的增加,复杂区和简单区地膜用户精度显著增加,复杂区特征数量为9时,简单区特征数量为6时,地膜用户精度基本趋于平稳,并且基本平稳时地膜用户精度均达到了90%以上。为了获取地膜分类精度最高的初步分类结果,本文选取地膜用户精度与地膜产品精度之和最大对应的纹理特征组合最为最佳纹理特征组合。最终确定复杂区前21个特征为最佳特征组合,简单区前7个特征为最佳特征组合。

图3不同纹理特征组合下的地膜识别精度

注:复杂区和简单区波段号b1至b24分别为红色均值、红色方差、红色协同性、红色对比度、红色相异性、红色信息熵、红色二阶矩、红色相关度、绿色均值、绿色方差、绿色协同性、绿色对比度、绿色相异性、绿色信息熵、绿色二阶矩、绿色相关度、蓝色均值、蓝色方差、蓝色协同性、蓝色对比度、蓝色相异性、蓝色信息熵、蓝色二阶矩、蓝色相关度。

图5 两试验区逐一加入特征后精度验证结果
3.3 最大似然初分类结果
分别将复杂区和简单区优选纹理特征与原始航片影像结合进行最大似然分类,并进行分类后处理——Majority分析,变换核尺寸为5×5,中心像元权重为1,结果如图6a所示。初步分类后处理能够将大部分地膜(包括残膜)提取出来,并且剔除了面积较小的伪地膜斑块。从结果中能看出,不管是复杂区还是简单区,不透水层(建筑物与硬化道路)易与地膜混淆,尤其是建筑物与硬化道路边界。在复杂区中,大部分地膜能够提取出来,但是错分像元仍然较多,不透水层(建筑物与硬化道路)与地膜混淆,被归为一类,重新编码为1,其他类型被重新编码为0;在简单区中,同样大部分地膜提取出来,有少量不透水层(建筑物与硬化道路)与地膜混淆,被归为一类,重新编码为1,其他类型被重新编码为0。
3.4 基于图像形态学算法和面积阈值分割法的覆膜农田空间分布提取
对于2个试验区域,初步分类后的结果仍然有许多错分和漏分的地膜像元。为了能够剔除大量错分像元,同时考虑正常地膜具有条状特征,残膜具有破碎状特征,本文在初步分类的基础上利用图像形态学算法(包括膨胀和腐蚀)将条状地膜连成覆膜农田对象,然后采用面积阈值分割法剔除伪覆膜农田对象和残膜对象。
经过试验,复杂区进行膨胀运算(变换核尺寸5×5、滤波重复次数1),能够得到最佳覆膜农田提取效果;简单区进行膨胀运算(变换核尺寸3×3、滤波重复次数3)能够得到最佳覆膜农田提取效果(图6b)。最佳农田提取效果指的是通过腐蚀和膨胀运算尽可能地将大部分地膜信息保留,打通地膜与非地膜图斑间缝隙的同时,去除噪声图斑并将地膜连结成覆膜农田对象。接着对形态学算法处理后的影像进行基于面积阈值的覆膜农田提取,剔除伪地膜图斑和残膜图斑,图斑面积在阈值之上的认定为覆膜农田,复杂区和简单区的面积阈值分别设定为35和500 m2,覆膜农田提取结果如图6c所示。
经过上述处理后提取的覆膜农田与实际覆膜农田大小不一致,结合原始航片影像比对的方法,进行二次形态学算法处理,使最终提取结果与原始航片影像中块状覆膜农田大小保持一致。经过目视比对和参数调整,复杂区采用闭运算(变换核尺寸为9×9、滤波重复次数为1)能得到最佳匹配效果;简单区先采用膨胀运算(变换核尺寸为5×5、滤波重复次数为1),再采用腐蚀运算(变换核尺寸为3×3、滤波重复次数为1)能得到最佳匹配效果。两试验区最终提取结果如图6d所示。

图6 基于图像形态学算法和面积阈值分割法的数据处理结果
Fig.6. Data processing results based on image morphology and area threshold segmentation
3.5 精度验证
3.5.1 位置精度分析
表1是复杂区和简单区利用混淆矩阵计算得到的总体像元精度、Kappa系数和覆膜农田的产品精度与用户精度。从表1可以看出,复杂区总体像元精度、覆膜农田的用户精度和产品精度均达到92%以上;简单区总体像元精度和覆膜农田的产品精度、用户精度则均在94%以上。复杂区Kappa系数为0.89;简单区Kappa系数为0.93。纵向观察表1可以看到,无论是总体像元精度、Kappa系数还是覆膜农田的产品精度、用户精度,简单区均高于复杂区。这可能由于复杂区中除了不透水层(建筑物与硬化道路)、植被、正常地膜以外,还有大量包含残膜的裸地,给基于面积阈值法提取覆膜农田带来了干扰。另外,由于复杂区地膜信息包括黑膜和少量白膜,白膜与不透水层更易混淆,一定程度上影响了分类结果。简单区中各种地物分布比较均匀、完整,没有易于浅色不透水层混淆的白膜和大量残膜信息的干扰。

表1 两试验区覆膜农田精度指标统计
3.5.2 面积误差分析
表2是复杂区和简单区2个试验区覆膜农田面积误差统计结果。从表2可以看出,简单区覆膜农田像元约为复杂区覆膜农田像元总数的2倍,复杂区和简单区覆膜农田真实像元数分别为178 644和374 639,覆膜农田提取像元数分别为177 970和367 349。由于航拍影像分辨率为0.15 m,故复杂区和简单区覆膜农田真实面积分别为4 019.49 和8 429.377 5 m2,复杂区和简单区覆膜农田提取面积分别为4 004.325和8 265.352 5 m2。简单区面积误差为1.95%,复杂区面积误差为0.38%,复杂区面积精度高于简单区面积精度。就像元位置精度来分析,复杂区产品精度、用户精度和总体像元精度均低于简单区(表1)。用户精度对应错分误差,产品精度对应漏分误差,就整个研究区来说错入错出会相互抵消,用户精度和产品精度接近时的地物的总量精度高于用户精度和产品精度差异大的地物的总量精度。本研究中复杂区覆膜农田产品精度与覆膜农田用户精度之差的绝对值小于简单区覆膜农田产品精度与覆膜农田用户精度之差的绝对值,错漏相抵,使得复杂区面积精度优于简单区面积精度。

表2 两试验区覆膜农田面积误差统计
4 讨 论
本文针对无人机遥感影像的特点,充分结合了图像光谱信息和纹理特征以及图像形态学算法和面向对象特征提取方法,提出了一种基于无人机航片影像快速提取覆膜农田的方法和流程。该方法在无人机农业遥感应用中有一定的参考价值。分析本文提取覆膜农田的方法流程和结果,总结了以下几个影响覆膜农田识别精度的因素:
1)GLCM不同参数提取纹理特征对地膜识别精度的影响。不同的纹理窗口、方向和步长共组成84种不同提取纹理特征的方案。从本文3.1节统计结果可以看出,不同的组合方案对地膜的识别精度差异较大,地膜用户精度最低为38.75%,最高能达到95%以上。因此,在进行纹理特征提取时要考虑提取参数的选择对识别精度的影响。
2)纹理特征优选对识别精度的影响。本文首先基于随机森林算法对纹理特征进行重要性评价,然后逐一加入重要性高的特征进行精度验证,选取精度最高对应的特征数作为最优特征组合。纹理特征筛选能够减少数据维度,提高处理效率,并且能够提高分类精度。但并不是纹理特征加的越多越好,已有研究表明加入不恰当的纹理特征不但不能提高分类精度反而可能降低分类精度[26],分类前进行特征优选工作是非常有必要的。
3)“同谱异物”像元混分问题。本文研究的2个试验区中,地膜信息包括黑膜和白膜。黑膜易与不透水层中黑色建筑物混分;白膜易与白色建筑物或硬化道路混分。“同谱异物”很大程度上影响覆膜农田的最终提取结果。本文通过面积阈值的方式有效减轻了不透水层的干扰,可以为相关研究提供借鉴。
4)残膜的存在会影响覆膜农田空间分布最终提取的精度。初步分类后处理得到的影像中地膜包含了当季的条状地膜和往季的破碎状残膜,如果研究区内包含了大量残膜,并且条状地膜之间的裸土间隔大于残膜与条状地膜间隔的话,通过进行图像形态学算法处理会导致残膜与条状地膜共同形成覆膜农田斑块,影响最终覆膜农田提取精度。
另外,本文还存在一些待改进之处。本文基于随机森林算法对特征进行重要性评价,优选纹理特征并结合原始航片影像得到的初步分类结果中覆膜农田与不透水层混淆仍然存在错分和漏分,导致最终覆膜农田提取结果精度下降。未来可以考虑通过增加色彩空间转换和基于RGB航片影像颜色指数(例如过绿指数或植被指数)等特征来提高初步分类精度。另外,本文首次使用图像形态学算法处理初步分类结果,使地膜连结成覆膜农田,并将非地膜信息与地膜信息分离的过程中,没有形成一套规则的算法参数设置方案,导致数据处理效率减低。作者考虑将在后续的研究中把地膜与非地膜信息间距和地膜间距考虑在内,通过优化算法参数设置方案来提高数据处理效率。
5 结 论
本文通过讨论纹理特征提取窗口、方向和步长选择纹理特征最佳提取参数,使用最佳参数提取影像纹理特征,利用随机森林对特征变量进行重要性评估,选取重要性高的波段,进行最大似然初分类,并充分结合图像形态学算法和基于面积阈值的面向对象提取方法,获得了基于无人机RGB影像的云南省昭通市鲁甸县两试验区覆膜农田分布,得到的结论主要如下:
1)选择纹理特征最佳提取参数能够大幅度提高影像分类精度。分析结果显示在无人机高分辨率影像基础上,窗口的大小相比于步长和方向对分类精度的影响更大,随着窗口增大,分类精度逐渐提高并趋于平稳。在实际应用中建议提取大窗口下的纹理特征进行覆膜农田提取。
2)基于灰度共生矩阵对无人机可见光影像进行纹理特征提取,并基于随机森林算法进行特征变量重要性评价,选择重要性高的纹理特征组合参与分类,在提高分类精度的同时,也缩减了建立模型时的特征数,提高了数据处理效率。另外,目前特征重要性评价方法有很多种,用随机森林算法进行特征重要性评价并优选纹理特征,对于影像分类比较有针对性。本文研究显示就均值、方差、协同性、对比度、相异性、信息熵、二阶矩和相关度八种纹理测度中均值对提取地膜的贡献最大,复杂区和简单区重要性最高的前3个特征波段均为蓝色均值、红色均值和绿色均值。
3)覆膜农田中的地膜呈条状,图像形态学算法与面向对象特征提取相结合对于覆膜农田提取有很大适用性,它可以简单、快速的将条状地膜连成片,得到覆膜农田,不需要过多考虑地膜与地膜间裸土的影响,进而通过面积阈值分割法获取覆膜农田分布信息。通过试验结果发现,依据该文提出的方法,复杂区和简单区覆膜农田识别的总体精度、Kappa系数、产品精度、用户精度和面积误差分别达到了94.84%、0.89、92.48%、93.39%、0.38%和96.74%、0.93、97.39%、94.63%、1.95%。
[1] 哈斯图亚. 基于多源数据的地膜覆盖农田遥感识别研究[D]. 北京:中国农业科学院,2017.
Hasituya. Mapping Plastic-mulched Farmland with Multi-Source Remote Sensing Data[D]. Beijing:Chinese Academy of Agricultural Sciences, 2017. (in Chinese with English abstract)
[2] 陈仲新,任建强,唐华俊,等. 农业遥感研究应用进展与展望[J]. 遥感学报,2016,20(5):748-767.
Chen Zhongxin, Ren Jianqiang, Tang Huajun, et al. Progress and perspectives on agricultural remote sensing research and applications in China[J]. Journal of Remote Sensing, 2016,20(5): 748-767. (in Chinese with English abstract)
[3] Picuno P, Tortora A, Capobianco R L. Analysis of plasticulture landscapes in Southern Italy through remote sensing and solid modelling techniques[J]. Landscape and Urban Planning, 2011, 100(1/2): 1-56.
[4] Lanorte A, Santis F D, Gabriele Nolè, et al. Agricultural plastic waste spatial estimation by Landsat 8 satellite images[J]. Computers & Electronics in Agriculture, 2017, 141: 35-45.
[5] Hasituya, Chen Z, Wang L, et al. Monitoring plastic-mulched farmland by landsat-8 OLI imagery using spectral and textural features[J]. Remote Sensing, 2016, 8(4): 353.
[6] Hasituya, Chen Z. Mapping plastic-mulched farmland with multi-temporal Landsat-8 data[J]. Remote Sensing, 2017, 9(6): 557.
[7] 沙先丽. 地膜农田遥感信息提取及覆膜地表温度反演[D]. 杭州:浙江大学,2012.
Sha Xianli. Extraction of Plastic-Mulched Landcover Information and on Retrieval of Mulched Land Surface Temperature[D]. Hangzhou: Zhejiang University, 2012. (in Chinese with English abstract)
[8] 李佳雨,王华斌,王光辉,等. 多源卫星数据的农用地膜信息提取[J]. 测绘通报,2018(7):78-82.
Li Jiayu, Wang Huabin, Wang Guanghui, et al. Plastic-mulched farmland extraction with multi-source satellite data[J]. Bulletin of Surveying and Mapping, 2018(7): 78-82. (in Chinese with English abstract)
[9] 高梦婕,姜群鸥,赵一阳,等. 基于GF-2遥感影像的塑料大棚提取方法对比[J]. 中国农业大学学报,2018,23(8):125-134.
Gao Mengjie, Jiang Qunou, Zhao Yiyang, et al. Comparison of plastic greenhouse extraction method based on GF-2 remote-sensing imagery[J]. Journal of China Agricultural University, 2018, 23(8): 125-134. (in Chinese with English abstract)
[10] 杭丹维. 南疆覆膜农田亚像元制图及热环境效应定量测算[D]. 杭州:浙江大学,2016.
Hang Danwei. Mapping Subpixel of Plastic Mulched Landcover and Measuring the Heat Effect Mulching: A Case of Study Southern Xinjiang[D]. Hangzhou: Zhejiang University, 2016. (in Chinese with English abstract)
[11] Lu L, Hang D, Di L. Threshold model for detecting transparent plastic-mulched landcover using moderate- resolution imaging spectroradiometer time series data: A case study in southern Xinjiang, China[J]. Journal of Applied Remote Sensing, 2015, 9(1): 097094.
[12] Levin N, Lugassi R, Ramon U, et al. Remote sensing as a tool for monitoring plasticulture in agricultural landscapes[J]. International Journal of Remote Sensing, 2007, 28(1): 183-202.
[13] 张航. 基于高光谱成像技术的皮棉中地膜识别方法研究[D]. 北京:中国农业大学,2016.
Zhang Hang. Identification of Plastic Films in Ginned Cotton based on Hyperspectral Imaging Technique[D]. Beijing: China Agricultural University, 2016. (in Chinese with English abstract)
[14] 王海慧. 农膜的偏振反射特征研究[D]. 长春:东北师范大学,2007.
Wang Haihui. Study on the Polarized Reflectance Characteristics of Agricultural Thin Membrane[D]. Changchun: Northeast Normal University, 2007. (in Chinese with English abstract)
[15] Hasituya, Zhongxin C, Fei L, et al. Mapping plastic-mulched farmland with C-Band full polarization SAR remote sensing data[J]. Remote Sensing, 2017, 9(12): 1264.
[16] Xiang H, Tian L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV)[J]. Biosystems Engineering, 2011, 108(2): 174-190.
[17] 汪小钦,王苗苗,王绍强,等.基于可见光波段无人机遥感的植被信息提取[J]. 农业工程学报,2015,31(5):152-159.
Wang Xiaoqin, Wang Miaomiao, Wang Shaoqiang, et al. Extraction of vegetation information from visible unmanned aerial vehicle images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(5): 152-159. (in Chinese with English abstract)
[18] 李明,黄愉淇,李绪孟,等. 基于无人机遥感影像的水稻种植信息提取[J]. 农业工程学报,2018,34(4):108-114.
Li Ming, Huang Yuqi, Li Xumeng, et al. Extraction of rice planting information based on remote sensing image from UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 108-114. (in Chinese with English abstract)
[19] 杨文攀,李长春,杨浩,等. 基于无人机热红外与数码影像的玉米冠层温度监测[J]. 农业工程学报,2018,34(17):68-75.
Yang Wenpan, Li Changchun, Yang Hao, et al. Monitoring of canopy temperature of maize based on UAV thermal infrared imagery and digital imagery[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2018,34(17):68-75.
[20] 戴建国,张国顺,郭鹏,等. 基于无人机遥感可见光影像的北疆主要农作物分类方法[J]. 农业工程学报,2018,34(18):122-129.
Dai Jianguo, Zhang Guoshun, Guo Peng, et al. Classification method of main crops in northern Xinjiang based on UAV visible waveband images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 122-129. (in Chinese with English abstract)
[21] 于东海,冯仲科. 基于无人机倾斜航空影像的树冠体积测算方法[J]. 农业工程学报,2019,35(1):90-97.
Yu Donghai, Feng Zhongke. Tree crown volume measurement method based on oblique aerial images of UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 90-97. (in Chinese with English abstract)
[22] 孙钰,韩京冶,陈志泊,等. 基于深度学习的大棚及地膜农田无人机航拍监测方法[J]. 农业机械学报,2018,49(2):133-140.
Sun Jue, Han Jingye, Chen Zhibo, et al. Monitoring method for UAV image of greenhouse and plastic-mulched landcover based on deep learning[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 133-140. (in Chinese with English abstract)
[23] Haralick R M. Statistical and structural approaches to texture[J]. Proceeding of the IEEE, 1979, 67(5): 786-804.
[24] 朱秀芳,潘耀忠,张锦水,等. 训练样本对TM尺度小麦种植面积测量精度影响研究(Ⅰ):训练样本与分类方法间分类精度响应关系研究[J]. 遥感学报,2007,11(6):826-837.
Zhu Xiufang, Pan Yaozhong, Zhang Jinshui, et al. The effects of training samples on the wheat planting area measure accuracy in TM scale (I): The accuracy Response of different classifiers to training samples[J]. Journal of Remote Sensing, 2007, 11(6): 826-837. (in Chinese with English abstract)
[25] 朱秀芳,潘耀忠,王双,等. 训练样本对TM尺度小麦种植面积测量精度影响研究(Ⅱ):样本质量对小麦测量精度的影响分析[J]. 测绘科学,2009,34(5):132-135.
Zhu Xiufang, Pan Yaozhong, Wang Shuang, et al. The effects of training samples on the wheat planting area surveying accuracy in TM scale (II): The accuracy response of different classifiers to samples quality[J]. Science of Surveying and Mapping, 2009, 34(5): 132-135. (in Chinese with English abstract)
[26] 朱秀芳,贾斌,潘耀忠,等. 不同特征信息对TM尺度冬小麦面积测量精度影响研究[J]. 农业工程学报,2007,23(9):122-129.
Zhu Xiufang, Jia Bin, Pan Yaozhong, et al. Effects of various feature information on the accuracy of winter wheat planting area measurement[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(9): 122-129. (in Chinese with English abstract)
Method on extraction of area and distribution of plastic-mulched farmland based on UAV images
Zhu Xiufang1,2, Li Shibo3, Xiao Guofeng2
(1.100875,; 2.100875,; 3.,100083,)
Identification of plastic-mulched farmland using UAV image is quite few. This paper proposes a method of combining with texture features, image morphology algorithm and threshold segmentation algorithm to extract plastic-mulched farmland using UAV Red-Green-Blue (RGB) images. In order to test the performance of this method, this paper took Ludian County of Zhaotong City, Yunnan Province as the research area, and obtained 2 images in the research area as experimental data. The complexity of land cover type in the 2 images was different. In complex area, the main land cover types included vegetation, impervious layer (building and road), plastic-mulched farmland (mainly black plastic mulch with a small amount of white plastic mulch), and bare soil (containing the plastic residues of a previous year). In simple area, the land cover types were similar with those in complex area; however, all plastic-mulched farmland was covered by black plastic mulch and there were no plastic residues in bare soil. Firstly, we calculated the gray level co-occurrence matrix of 2 images in different window sizes (3×3, 5×5, 7×7, 9×9, 11×11, 13×13, 15×15), directions (0, 45°, 90° and 135°) and steps (1, 2 and 3) and extracted 8 texture features from each band of RGB images including mean, variance, synergy, contrast, dissimilarity, information entropy, second moment and correlation. Secondly, we combined the original RGB image with different texture features to make maximum likelihood classification and determined the best extraction parameters of the texture features by comparing the overall pixel accuracy, user accuracy and product accuracy of the plastic mulch in complex area. The best extraction parameters of texture features were the window size of 15×15, the direction of 0, and the step of 2, which were also used to extract texture features of the image in simple area. Thirdly, we selected the optimal texture combination based on importance evaluation of texture features using Random Forest Algorithm and combined them with original UAV RGB image to make maximum likelihood and get preliminary classification maps in both complex area and simple area. Fourthly, we recoded the preliminary classification maps into binary maps (1 refers to plastic mulch and 0 refers to the other land cover types) and made majority filtering to remove noises (such as the plastic residues of a previous year). Then, we used image morphology algorithms to convert the strip plastic mulch into the plastic-mulched farmland and set area threshold to extract plastic-mulched farmland distribution. The area thresholds were 35 m2in complex area and 500 m2in simple area. Finally, taking the digitized mulched farmland as references (ground truth data), the accuracy of the recognition results of mulched farmland was assessed by error matrix and area error. The results showed that the texture features extracted by the optimal parameters could greatly improve the classification accuracy. The image morphology algorithm and the threshold segmentation method could effectively extract the block-shaped plastic-mulched farmland. The overall accuracy, Kappa coefficient, product accuracy, user accuracy and area error were 94.84%, 0.89, 92.48%, 93.39%, 0.38% in complex area, and 96.74%, 0.93, 97.39%, 94.63%, 1.95% in simple area, respectively. Compared with step and direction, the size of window had greater influence on plastic mulch classification accuracy. Among 8 texture features, mean contributed most to extracting plastic mulch. The method of extracting plastic-mulched farmland based on the fusion of supervised classification and image morphology algorithm proposed in this paper can provide reference for the development of identification algorithm about plastic-mulched farmland.
unmanned aerial vehicle; algorithms; extraction; plastic-mulched farmland; textural features; maximum likelihood classification; threshold segmentation
朱秀芳,李石波,肖国峰. 基于无人机遥感影像的覆膜农田面积及分布提取方法[J]. 农业工程学报,2019,35(4):106-113. doi:10.11975/j.issn.1002-6819.2019.04.013 http://www.tcsae.org
Zhu Xiufang, Li Shibo, Xiao Guofeng. Method on extraction of area and distribution of plastic-mulched farmland based on UAV images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(4): 106-113. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.04.013 http://www.tcsae.org
2018-10-11
2019-02-14
北京市陆表遥感数据产品工程技术研究中心资助项目;国家“高分辨率对地观测系统”重大专项资助项目。
朱秀芳,副教授,博士生导师,主要从事遥感应用相关研究。 Email:zhuxiufang@bnu.edu.cn
10.11975/j.issn.1002-6819.2019.04.013
TP7
A
1002-6819(2019)-04-0106-08
