基于Pro/E的双拟人臂机器人设计
2019-03-22王春荣王欣然夏尔冬熊昌炯
王春荣,王欣然,夏尔冬,熊昌炯,邓 娟
(1.三明学院 机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365004;3.绿色铸锻及其高端零部件制造福建省2011协同创新中心,福建 三明 365004;4.福建省铸锻零部件工程技术研究中心,福建 三明 365004)
目前,机器人已经成为各个行业研究的热点,特别是仿人机器人[1-2]、拟人机械臂[3-4]等领域。Zulkifli等[5]利用多目标优化算法对拟人机械臂的运动性能进行了分析,指出改进的神经控制器能提供拟人臂的运动性能;刘雷[6]设计了一种五自由度拟人机械臂, 并利用惯性姿态捕捉算法对其正逆运动学进行分析;田凤娟[7]利用MATLAB/Simulink对拟人机械臂末端执行器的运动学与力学进行分析,得到各个关节的位置、角速度与角加速度并对机械臂的强度进行了验证;秦利等[8]设计了一种4自由的混联拟人机械臂并利用神经网络算法对其运动轨迹进行了仿真分析;张程等[9]通过Robotics Toolbox工具箱对5自由度拟人机械臂的搬运作业的轨迹进行了分析,使其能更好的完成搬运作业。
本文对人臂的构型与运动进行分析,设计一款具有7自由度的拟人机械臂,利用电机驱动与皮带传动方式实现机械的运动,并构建双拟人臂机器人模型。最后,利用Pro/E对双拟人臂机器人模仿人走路过程中手臂的摆动动作进行了分析,验证设计的合理性。
1 拟人机械的设计方案
1.1 人臂的运动分析
人臂的七个自由度,使其运动非常灵敏,能准确地运动到任意的指定位置。根据其的运动机理,可将其划分为上下臂体、下臂体以及肩、肘、腕3个关节,其中肩关节、肘关节、腕关节的自由度分别为3个、1个、3个。根据调查一般人臂各个关节的大概运动范围如表1所示。
表1人臂关键运动范围

1.2 仿人机械臂自由度的确定
物体在空间中的位姿需要由6个参数进行确定,其中3个位姿参数,3个方位参数。仿人机械臂要灵活的运动到空间中的任意位置,需要跟人臂一样拥有7个自由度,其冗余性大大提高了其灵活性。因此,本文结合对于真实人臂各个关节的运动分析,对仿人机械臂各个关节的自由度确定为肩关节3个,肘关节2个,腕关节2个,自由度分配简图,如图1所示。
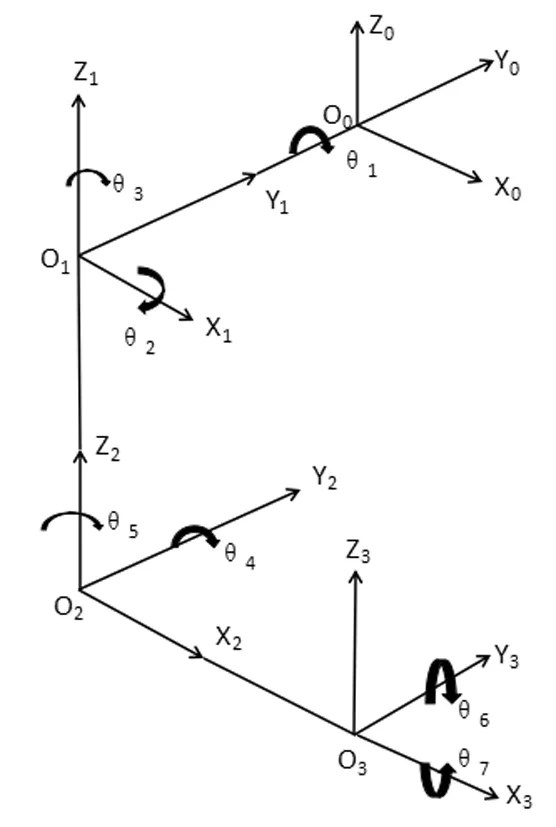
图1 仿人机械臂自由度分配
2 仿人机械臂设计
2.1 肩关节的设计与分析
肩关节在人臂中是一个非常重要的回转关节,其相当于球窝关节,因此其对拟人机械臂的定位精度与稳定性具有直接影响。在拟人机械臂中肩关节与机器人本体相连,应具有三个自由度来实现其前屈后伸、外展内收以及前旋后旋的三种运动。若利用简单的球铰结构设计拟人臂的肩关节,则难以驱动和承受拉力。通过对人臂机构的研究,本文提出利用三自由度球面并联机构融合球铰机构的改进方式来模拟人臂肩关节。即将三自由度球面并联(3-RRR)机构的球铰虚约束,并置于并联机构的几何中心上,以克服球铰机构无法承受拉力的缺点。根据此建立肩关节的三维模型如图2所示。

图2 肩关节机构
关节机构的运动范围是拟人臂重要的运动参数,虽然在设计时会给定其理论的运动范围,但其特殊的外形机构会对其在运动仿真过程造成一定的干涉。根据肩关节的运动方式,本文设计拟人臂的肩关节在X轴、Y轴和Z轴的运动范围分别为360°、180°、绕Z轴180°。
2.2 肘关节的设计与分析
虽然肘关节与肩关节一样同属于球窝关节,但是肱尺关节是控制肘关节上屈、下伸的重要关节,也正是由于肱尺关节的影响,使得肘关节只具有屈伸和旋转两种运动方式。因此本文利用十字轴来带动下臂的运动,使的肘关节具有翻转、俯仰的两个自由度。根据此建立肘关节的三维模型如图3所示。
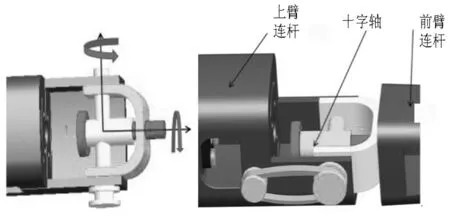
图3 肘关节机构
显然,结构设计对肘关节的运动范围也具有一定的影响,分析图3肘关节的结构,可以发现当其产生幅度较大的俯仰运动时,上臂外部机构与下边平台会发生碰撞。因此合理的设计肘关节结构能避免边界限定与杠杆干涉从而增大其运动范围。本文设计的肘关节的运动范围大致为俯仰120°、翻转360°。
2.3 腕关节的设计与分析
分析人臂的腕关节可知,由于尺骨和桡骨的存在使得人臂的腕关节在水平方向具有偏转和轴向上微量的移动。腕关节是实现下臂和手掌的连接,虎克铰链的是一种两个轴线相互垂直并相交的转动副,具有两个转动自由度,因此本文采用虎克铰链结构来模拟人臂腕关节的偏转和俯仰运动,使其完成背伸掌屈、桡偏尺偏的运动,三维模型如图4所示。

图4 腕关节机构
由于虎克铰链的两个运动方式具有一定的干涉,因此拟人臂腕关节的运动范围受制于其制约关系。虎克铰链结构的干涉来源于偏转和俯仰的过程中受到彼此的第一腕部U形连接块与第二腕部U形连接块的制约。通过合理的尺寸设计,是的拟人臂腕部的转动空间接近于人臂手部的运动空间,本文设计的腕关节运动范围为偏转60°、俯仰70°。
2.4 传动方式设计与位姿分析
根据以上所设计的肩关节、肘关节以及腕关节,建立双拟人机械臂机器人模型,如图5所示。肩关节的传动方式设计为:电机-减速器-输出轴直接驱动;肘关节与腕关节的传动方式为:电机-减速器-皮带传动-输出轴驱动。
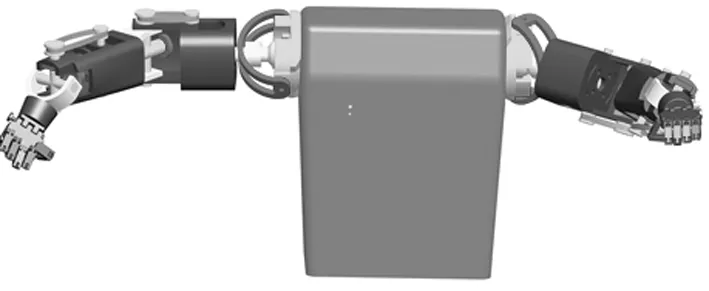
图5 双拟人臂机器人
利用D-H方法对拟人机械臂进行位姿分析,表2为拟人机械臂的D-H坐标参数。
表2拟人臂D-H参数
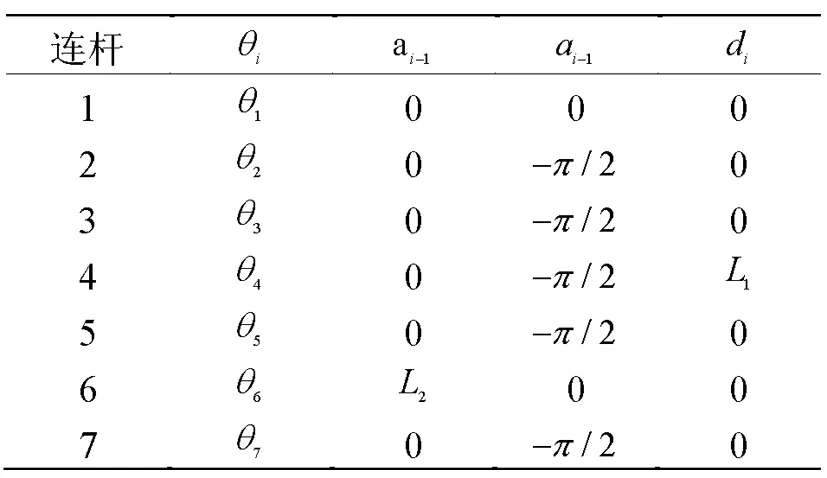
根据表2中的D-H参数和齐次变换矩阵公式可推导出至的位姿矩阵。因此,可得出拟人机械臂末端执行器到机器人基座坐标系下的变换矩阵为:
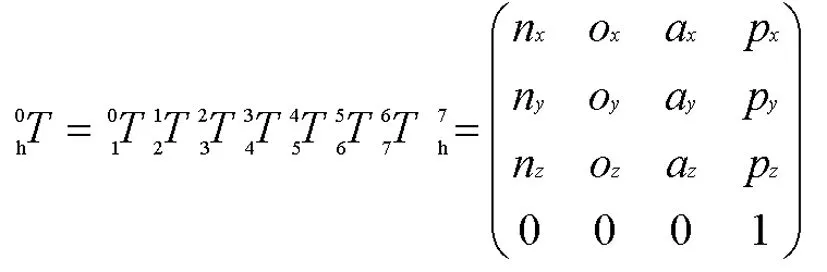
(1)
3 拟人机械臂的运动仿真
3.1 运动参数设置
为验证本文所设计的双拟人机械臂的合理性,在Proe/E中对双拟人臂机器人的摆臂运动进行仿真,模仿人走路过程中手臂的摆动。
首先对拟人臂的各个关节配置运动所需的伺服电机,并对其运行的起止时间、转速等进行配置,如图6所示。然后将拟人臂的运动类型设置为“位置”,以对手臂末端的位置进行分析,并设定整个运动过程的时间、帧频以及最小间隔等参数,具体设置如图6所示。

图6 运动参数
3.2 运动仿真结果分析
设置完所需的运动参数之后,分析拟人臂左手臂在前右手臂在后开始做摆臂动作,直至双拟人臂摆回原来的姿势。选取末端执行器上最外的端点,分析双拟人臂摆臂过程的轨迹。分析得这一点的轨迹曲线如图7所示,对应的位置曲线如图8所示。
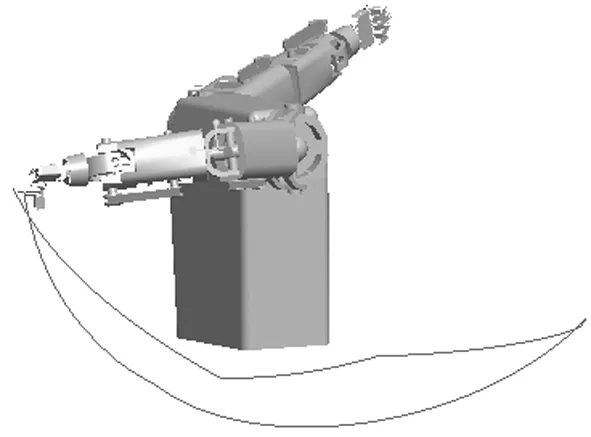
图7 末端执行器的轨迹曲线
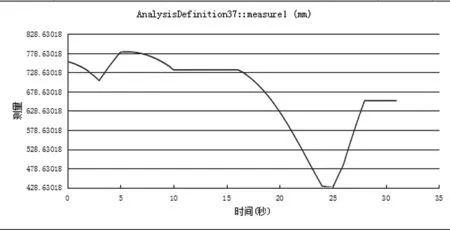
图8 末端执行器的位置曲线
分析仿真结果可知,本文所设计的具有7自由度的双拟人臂机器人,运动过程平稳、具有较高的灵活性,能产生与人臂运动过程相近的动作。
4 结论
通过对人臂活动机理的研究,分析人臂各个关节的运动范围,确定拟人臂三个关节的自由度与所使用的机械运动副,设计了一款仿人臂外形的拟人机械臂。同时,通过Proe/E仿真表明,所设计的双拟人臂机器人具有较高的灵活性,能产生与人臂运动过程相近的动作。
