基于三维激光扫描技术的城市大比例尺数字测图研究
2019-03-19魏士春
魏士春

【摘 要】三维激光扫描技术以其快速、非接触性、高密度、高精度等特点在测绘作业中得到广泛应用,论文简述了城市大比例尺测图现状,探讨了三维激光扫描技术应用于城市大比例尺地形图测绘作业中的方法及步骤,总结了作业过程中的关键注意事项,通过试验证实了三维激光扫描技术应用于城市大比例尺测图中的可行性。
【关键词】三维激光扫描技术;大比例尺地形图测绘;点云配准;矢量化
【中图分类号】F222 【文献标志码】A 【文章编号】1673-1069(2019)01-0191-04
1 引言
当今城市发展日新月异,城市街道两侧遍布高楼大厦,为满足城市规划建设需要,迫切需要对城市进行大比例尺地形图测绘工作,然而,遍布城市的高楼大厦建筑结构日益复杂,加之城市中车辆、人流较多,商铺林立,给地形测图工作带来了很大困难,传统的测绘作业模式已不能满足当前测绘工作的需要。随着技术的进步,三维激光扫描技术是近几年发展起来的较为成熟的技术,其自身的诸多优势,为测绘行业带来了新的技术突破。
2 当前城市大比例尺测图现状
就我国目前情况来看,大多数城市及地区均已对城市建成区进行了大比例尺地形图测绘并建立了基础地理信息数据库,在数字城市建设、城乡规划管理等工作中发挥了巨大的作用。但是随着城市发展的日新月异,特别是近几年城市建设的突飞猛进,城市面貌焕然一新,原有地形图数据的现势性及更新速度已跟不上城市建设的步伐,因此,如何实现城市大比例尺地形图的快速更新工作就显得尤为重要和迫切。如何快速高效地实现数字地形图更新是测绘工作的重要考虑因素。当前,大比例尺地形图测绘方法主要有以下几种:
①全站仪法:本方法是数字地形图测绘最常用的作业模式,该方法利用全站仪野外设站逐点采集目标点的坐标值,配合电子平板或者手绘草图的方法测绘地形图,该方法的优点是设站灵活、适应性强,缺点是需要逐点测绘、内外业工作量较大、对作业人员素质要求较高、比较费时且作业效率不高。
②GNSS RTK法:本方法是利用RTK连接基准站或者GNSS CORS站等作業模式直接采集目标点的坐标配合电子平板或者手绘草图的方法进行作业,该方法较全站仪法采集点更加便捷,但是由于受周围环境影响较大,遇到信号遮挡等情况将无法作业,特别是城市大比例尺测图中,受周围建筑物及树木遮挡严重,该方法基本无法使用。
③无人机航测法:该方法是近几年新兴的低空航测测绘方法,其具有机动灵活、高效快速、作业成本低等诸多优点,但从实际应用效果来讲,其并不适用于城市大比例尺地形图测绘项目,无人机航测空域申请在城市建成区申请较为困难,其测绘精度根本无法满足大比例尺测图的需要。
3 三维激光扫描测量方法简介
三维激光扫描测量的方法就是大面积高分辨率地快速获取被测对象表面的三维坐标数据。它属于一种立体测量技术,又被称为“实景复制技术”,是继全球定位系统技术之后又一项测绘技术新突破[1]。与传统测量技术相比,它能完成对复杂物体的测量,它的特点就是快速性、不接触性、实时、动态、高密度、高精度获取地面的三维信息[2]。
三维激光扫描仪主要是一部快速准确的激光测距仪加上一组可导引激光,以等速度扫描的反光棱镜加高清摄像机组成。从扫描的空间位置或系统运行平台来划分,可分为手持式激光扫描仪、地面型三维激光扫描仪、机载型三维激光扫描仪,在城市大比例尺地形图测绘作业中一般应用地面型三维激光扫描仪。激光测距仪采用脉冲式测量,可以在主动发射激光的同时接收来自自然物体的反射信号并进行测距,针对每一扫描点可测得测站至扫描点的斜距,配合扫描的水平角和竖直角,可以求得每一扫描点与测站点之间的坐标差,若测站点和一个定向点的坐标为已知值,则可以求得每一扫描点的三维坐标。
三维激光扫描技术也被称为从单点测量进化到面测量的革命性技术突破。该技术在文物古迹保护、建筑、规划、土木工程、工厂改造、室内设计、建筑监测、交通事故处理、法律证据收集、灾害评估、船舶设计、数字城市以及军事分析等领域也有了很多应用。其技术优势有以下几点:
①非接触测量。三维激光扫描技术采用非接触扫描目标的方式进行测量,对扫描目标物探不需进行任何表面处理,直接采集物体表面的空间三维数据且真实可靠。可以用于解决危险目标、环境(或柔性目标)及人员难以企及的情况,具有传统测量方式难以完成的技术优势。
②数据采样率高。三维激光扫描仪可以达到数十万点/秒,采样速率是传统测量方法难以比拟的。
③主动发射扫描光源。三维激光扫描技术采用主动发射扫描光源(激光),通过探测自身发射的激光回波信号来获取目标物体的数据信息,因此,在扫描过程中,可以实现不受扫描环境的时间和空间的约束。
④高分辨率、高精度。三维激光扫描技术可以快速、高精度获取海量点云数据,可以对扫描目标进行高密度的三维数据采集,从而达到高分辨率的目的。
⑤数字化采集,兼容性好。三维激光扫描技术所采集的数据是直接获取的数字信号,具有全数字特征,易于后期处理及输出。用户界面友好的后处理软件能够与其他常用软件进行数据交换及共享。
⑥可与GPS系统配合使用。这些功能大大扩展了三维激光扫描技术的使用范围,使其对信息的获取更加全面、准确。内置数码摄相机的使用,增强了彩色信息的采集,使扫描获取的目标信息更加全面。GPS定位系统的应用使得三维激光扫描技术的应用范围更加广泛,与工程的结合更加紧密,近一步提高了测量数据的准确性。
4 三维激光扫描测量作业方法
用三维激光扫描仪以每秒约1百万个点的扫描速度,对被扫物体进行快速高效的扫描,迅速得到被扫物体的各点三维坐标,得到反映被扫物体空间位置信息的点云数据。将点云数据导入计算机中,通过专业大数据处理软件及快速加载等技术的处理,将海量数据瞬间加载,对点云数据进行加工处理,就可以得到被扫物体立体的三维模型。
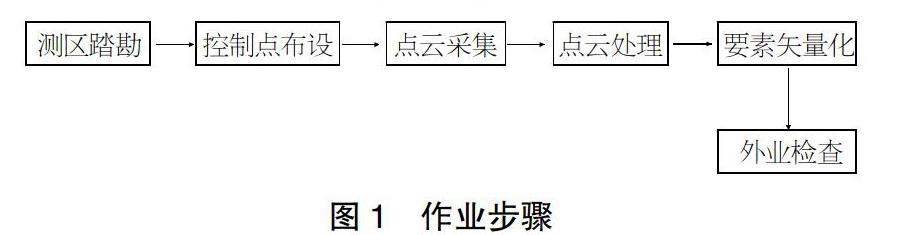
4.1 测区踏勘
首先要对测区进行实地踏勘,了解整个测区的概况,初步划分扫描作业区域,同时收集测区内已有的地形图、控制点等成果资料,另外,在测区内寻找可利用的外接电源,以便为扫描仪提供外接电源。
4.2 控制点布设
要在测区的有效观测范围内布设足够数量的控制点,各控制点间要保证至少与一个点通视,各点间的距离大致相等,以间距150~200m为宜,控制点应选择在利于安置仪器且不易受外界环境影响的地方。将GPS定位和三维激光扫描仪测量结合起来,可将三维激光扫描成果转换到局部坐标系中[3]。布设控制点的目的就是利用其实现将点云数据的扫描坐标系到绝对坐标的转换。控制点布设方法有GNSS RTK法及全站仪导线法,控制点的精度决定了点云数据转换到绝对坐标系的精度。
4.3 点云采集
在控制点附近选择适当位置设站采集点云数据。扫描站点必须选择在平坦、稳定的地方,严禁在路上的非固定石板、石块、杂草丛生或者土质松软处安置仪器,在保证精度的情况下,每个扫描站点应能最大限度地扫描目标场景,并且尽量保证每个扫描站点上无被遮挡区域,受周围人员、车辆等影响较小。根据测量要求和实际情况,在测区内布设标靶。标靶应布设在不同扫描区域内的重叠区内,至少要布设3个以上的标靶,各个标靶不能布设在一条直线上,标靶的高度尽量与设站高度相当。设站点与目标点距离不宜大于150m,为了满足各站点云数据拼接的需要,相邻两站之间至少要保证4个同名点,为了使标靶在点云上判读起来更清晰,要控制在距离设站点30m以内。
在扫描站点上安置好仪器并设置好扫描分辨率等参数开始扫描,当使用标靶进行点云配准时,应对标靶进行高分辨率扫描,以确保靶心坐标的提取精度。扫描过程中应尽可能避免人员走动,以减少仪器震动引起的扫描异常。每站扫描结束后,应现场检查数据,判断是否有遗漏和重复扫描区域,检查标靶的空间采样率是否符合要求等。
在控制点上架设全站仪实测标靶坐标。标靶定位的准确性会直接影响到点云配准的精度及后续的数据处理精度。
4.4 点云处理
点云处理是三维激光扫描作业的重点,虽然地面三维激光扫描作业获取数据速度非常快,但因其数据量巨大,数据处理需要花费大量时间,一般每种扫描仪都配备专用点云数据处理软件。点云处理主要分为点云降噪、点云拼接、坐标转换、点云化简及三维建模等工作。原始点云数据中包含大量的噪声,噪声来源多种多样,如非被测目标物点、周围震动引进的扫描异常点等,可通过人工选择删除及软件自动去除两种方式消除噪声。由于每一站所获得的点云数据坐标均处于以当前扫描站为基准的扫描坐标系下,为了得到整个区域的完整点云数据,必须将每站的点云数据转换到同一坐标系下,可通过标靶定位来实现点云拼接及坐标转换。地面激光扫描获取的海量点云数据一方面能详细描述被测物体特征,但另一方面也为数据处理带来了很大困难,过多地占用计算机资源,造成数据处理缓慢,因此,需要删除对作业任务无关的数据,将数据简化后以利于后续操作。
在城市大比例尺地形图三维扫描作业中,建议采用基于控制点的单站配准方法进行多站点云配准[4],该方法由于与控制网相连,因此,能够直接将点云数据转换到目标坐标系中,具有精度高、误差不积累、内业处理时间短等优点。该方法的作业步骤如下:首先在待扫描区域建立统一控制网,然后将待测区域划分为若干子区域,每一子区域范围内布设标靶,标靶个数不得少于三个。利用地面三维激光扫描仪对每一子区域进行扫描,同时利用全站仪实测标靶坐标,得到标靶在统一控制网坐标系下的坐标。提取标靶在当前扫描仪坐标系下的坐标,利用标靶的两套坐标,即可获取每一子区域扫描仪坐标与全站仪坐标的变换参数。由于全站仪测得的标靶坐标已经在一个统一的控制网坐标系下,因此,利用每一子区域的变换参数将每站扫描数据转换至全站仪坐标系下,就已构成了在统一控制网坐标系下的点云数据,从而直接完成多站点云的配准。
4.5 要素矢量化
以处理好的点云数据为基础,在专业软件中采集相应地物、地貌特征点进行手动矢量化,矢量化完成后导出为DXF格式成果文件,方便导入CAD中。
将矢量化的DXF成果文件导入测图专业软件中进行符号化、图廓整饰等工作。
4.6 外业检查
对成果图进行外业巡视检查,对与实地不符的要素进行修补更正,直至正确无误。
5 应用实例
重庆市沙坪坝区某新建小区,建筑物结构复杂,园林绿化造型各异,如果采用传统测绘方法难度较大,效率较低,采用地面三维激光扫描测绘作业可以快速高效地获取测区三维地理信息数据。
首先经过实地踏勘了解了测区的基本情况,利用重庆CORS系统采用GPS-RTK方式布设图根控制点16个,控制点间距150m左右,采用徕卡高效一体化ScanStation C10三维激光扫描仪进行三维激光扫描测绘作业,采用基于控制点的单站配准模式进行点云数据配准,根据测区范围及扫描仪的视角,将整个测区划分为8个子区域,在每个子区域中设置了8~15个标靶,利用全站仪在控制点上实测各标靶的坐标,利用扫描仪在各个区域中进行扫描,并对标靶进行精扫。内业采用Cyclone7.1软件进行点云降噪、点云拼接、坐标转换、点云化简及矢量化等工作,利用南方测绘Cass9.2成图软件进行内业编辑成图并进行外业检核修改。经试验精度符合要求(见表1),作业效率相比传统测绘方法提高5~8倍以上。
6 結语
三维激光扫描技术应用于城市大比例尺测图中,具有传统测绘方法无可比拟的技术优势。经实际验证,采用基于控制点的单站配准方法进行多站点云配准的地面三维激光扫描测绘技术是城市大比例尺地形图测绘作业时比较可靠实用的作业模式。三维激光扫描测绘作业克服了传统测绘方法单点测量、速度慢等缺点,极大地减少了外业测绘的难度及工作量,采集的三维坐标准确可靠,采集数据信息丰富,能够极大地提高测绘作业效率,地面三维激光扫描技术的出现为空间信息获取提供了新的手段,应用前景广阔。
【参考文献】
【1】朱磊,王健,毕京学.三维激光扫描技术在变形监测中的应用[J].北京测绘,2014(5):78.
【2】张会霞,朱文博.三维激光扫描数据处理理论及应用[M].北京:电子工业出版社,2012(12):23.
【3】徐源强,高井祥,王坚.GPS在三维激光扫描中的应用[J].煤炭工程,2010(9):88.
【4】官云兰.地面三维激光扫描数据处理中的若干问题研究[J].同济大学博士学位论文,2008(12):108-109.
