准零风层新型临近空间浮空器区域驻留性能*
2019-03-19邓小龙于春锐杨希祥侯中喜
邓小龙,李 魁,于春锐,杨希祥,侯中喜
(1. 国防科技大学 空天科学学院, 湖南 长沙 410073; 2. 北京跟踪与通信技术研究所, 北京 100094)
临近空间浮空器是指主要利用浮力在20 km高度附近进行持久驻空飞行的浮空类飞行器,主要包括平流层飞艇和高空气球[1]。通过携带任务载荷,临近空间浮空器具备对特定区域进行长期、实时、全天候、全天时的信息获取与信息对抗能力,可为高分辨率对地观测、预警探测、通信中继、防灾减灾、环境监测和高速通信等应用需求提供技术途径,具有巨大的军事应用和民用前景,引起了越来越多国家的重视[2-3]。
由于临近空间大气密度极低,浮空器需要庞大的体积来提供浮力,致使其飞行性能严重受制于环境风场。为开展区域定点驻留任务,临近空间浮空器通常采用传统的对抗风场的策略,即利用强大的动力和能源克服风场执行飞行任务,这也致使临近空间浮空器的动力分系统和能源分系统的设计非常复杂,不仅重量代价高,而且在总体设计上常陷入“体积—阻力—推力—能源—重量—体积”的恶性循环,这也是目前平流层飞艇设计所面临的一个重要问题[4-5]。
在平流层高度,大气运动以东西方向的水平运动为主,垂直对流较弱。研究发现,平流层风场在冬夏转换期间东西风向发生翻转,在东风带和西风带之间存在空间范围较大、时间上比较稳定的纬向风转换层,即准零风层[6]。由于准零风层上下层的纬向风风向相反,基于对反向风层风场利用的新型临近空间浮空器,理论上能以较小的能源和动力代价实现飞行器的区域驻留,为临近空间浮空器区域驻留问题提供一种解决途径[7-8]。
谷歌公司提出的“Project Loon”项目采取超压球体制,通过调节副气囊内空气量来改变浮空器飞行高度,从而利用不同高度层风场实现飞行轨迹设计,旨在通过气球网络对一定区域进行信号覆盖[9]。Northrop Grumman公司提出的“STRATACUS”项目采用零压球体制,通过氦气温度对不同高度层风场的利用进行飞行轨迹设计,旨在为一定区域提供C4ISR服务[10]。王超等[11]提出通过对浮空器的热能利用进行空气的排放控制,进而高度调控,通过悬挂的气动帆面进行航向控制,以实现对临近空间浮空器的轨迹控制。Saito等[12]提出了一种具备长航时驻空飞行能力的串联气球系统,该系统包含一个零压主气球、载荷以及位于载荷下方的一个超压气球,通过一根可伸缩的悬挂绳提高串联气球系统的驻空性能,在仅消耗少许能源的情况下改变主零气球的驻空高度,可利用不同风向的风层进行轨迹控制。由此可见,基于风场利用的临近空间浮空器是当前研究前沿,但大多集中于试验探索或概念研究,区域驻留的相关报道有限。
1 临近空间快速响应浮空器
临近空间快速响应浮空器基于准零风层风场利用策略进行区域驻留,基于高度调控分系统和动力推进分系统对飞行器南北方向和东西方向分别进行控制:在南北方向上,通过飞行平台携带的动力系统进行控制;在东西方向上,通过高度调控系统来实现对不同风层的纬向风场利用,当需要向东飞行时,可控制其飞行高度使其进入西风带,利用该风层的风场能量飞行,反之则进行东风带飞行。通过对驻空高度的反复调整和南北飘移的反复修正控制来实现在一定区域的长时驻空,其工作原理如图1所示。

图1 东西方向控制原理图Fig.1 Schematic of the east-west direction control
临近空间快速响应浮空器系统主要包括球体结构分系统、高度调控分系统、动力推进分系统、能源分系统、航电分系统、载荷分系统等。通过多学科建模分析,以总质量最小为设计目标函数,根据浮重、推阻、能源三大平衡关系得到如表1所示的总体设计参数。
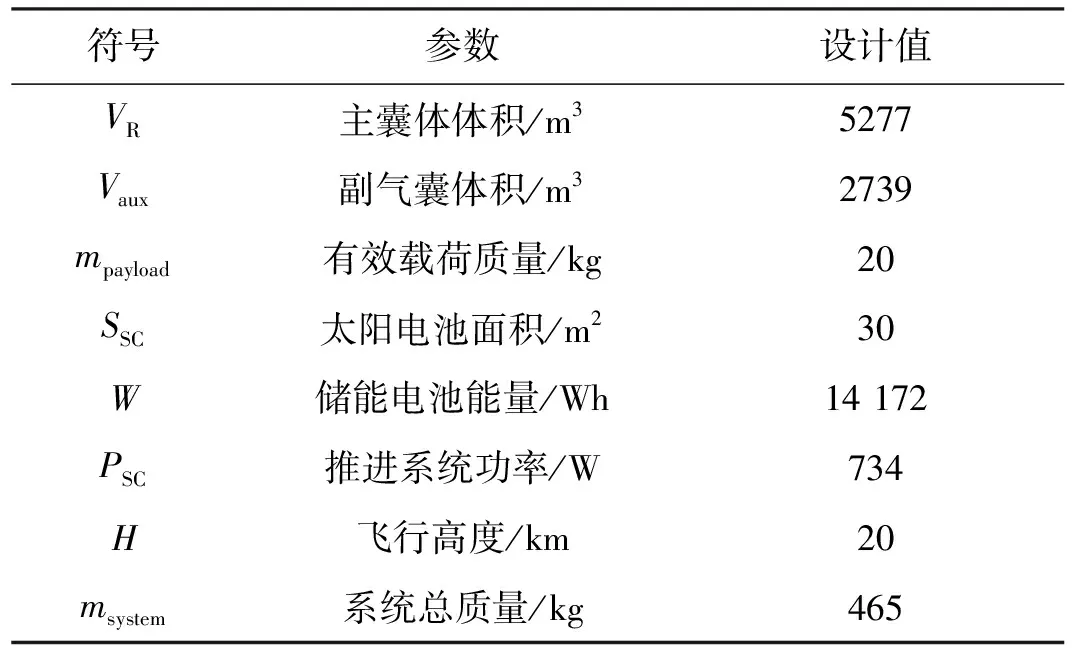
表1 主要设计参数
2 区域驻留建模
2.1 动力学模型
临近空间快速响应浮空器系统通过高度调控对不同高度纬向风场利用进行东西方向的飞行控制,通过推进对南北方向进行飞行控制。建立浮空器系统的质点模型,忽略球体弹性变形和姿态变化的影响[13]。
由牛顿第二定律,竖直方向动力学方程为:
(1)
式中,M为快速响应浮空器系统总质量和附加惯性质量的总和:
M=msystem+kρairV
(2)
k为附加惯性质量系数,V为浮空器体积。附加惯性质量为飞行器运动所排开空气对其的反作用效应,对于体积小的飞行器,此作用可以忽略;对于体积较大的浮空类飞行器,则应考虑附加惯性质量的影响。
浮空器内气体状态方程:
PV=mHeRHeT+mairRairT
(3)
式中,mHe为浮空器内氦气质量,RHe为氦气常数,mair为浮空器内空气质量,Rair为空气常数,T为气体温度,由于系统高度变化远快于温度变化,假定氦气温度与环境温度相同。快速响应浮空器在竖直方向所受外力包括浮力Fb、重力G、气动阻力Fdv:
Fvertical=Fb+G+Fdv
(4)
Fb=ρairgVR
(5)
G=Mg
(6)
(7)
式中,ρair为大气密度,vvertical为升降速度,Sxy为参考面积。采用正球形浮力体,其阻力系数Cd经验公式[14]为:
(8)
其中,Re为雷诺数。
由牛顿第二定律,水平方向动力学方程为:
(9)
在水平方向所受外力包括气动阻力Fdh和推进系统的推力FT:
Fhorizontal=Fdh+FT
(10)
(11)
FT=PTηT/vhorizontal
(12)
式中:vhorizontal为水平方向空速;Sxz为参考面积;PT为推进系统输出功率;ηT为推进系统效率,包括电机、螺旋桨等效率。
2.2 高度调控模型
高度调控分系统通过将空气排出或压入副气囊,改变浮空器的总重量,进而调整驻空浮重平衡状态。当需要提升浮空器的飞行高度时,开启排气阀,副气囊中空气受内外压差作用而排出,减少浮空器总重,在到达预期飞行高度时控制浮重平衡。反之,当需要降低浮空器的飞行高度时,鼓风机做功,将环境空气压入副气囊,增加浮空器总重,在到达预期飞行高度时控制浮重平衡即可。
当浮空器处于上升调控过程,空气阀门打开,副气囊中空气被排出,空气质量的变化[15]为:
(13)
式中,ΔP为超压气球与大气环境压差,Rair为阀门开口半径,K为阀系数。
当浮空器处于下降调控过程,鼓风机做功将外界空气压入副气囊,空气质量变化[16]为:
(14)
式中,Vin为单位时间进气量。
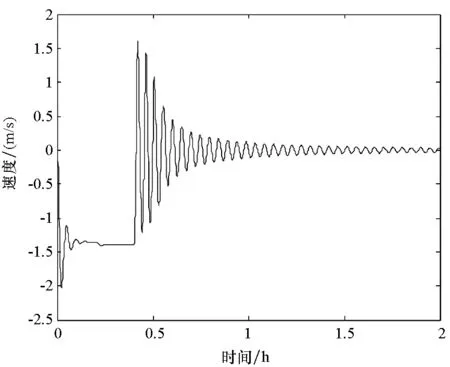
图2、图3分别给出了19~21 km之间下降和上升调控过程的空气质量与升降速度。当需要降低浮空器飞行高度时,利用鼓风机将环境空气压入副气囊,由图2分析可知,驻空高度降低2 km需要压入128 kg的空气,通过风机与阀门的共同控制可使浮空器调整到新的驻空高度。反之,当需要提升浮空器飞行高度时,通过开启空气阀门使副气囊中空气质量降低到85 kg,其运动状态如图3所示。

(a)飞行高度与空气质量变化(a) Changes of flight height and air quality
(b) 速度变化(b) Speed changes图2 高度调控下降过程Fig.2 Decline process of altitude control

(a) 飞行高度与空气质量变化(a) Changes of flight height and air quality
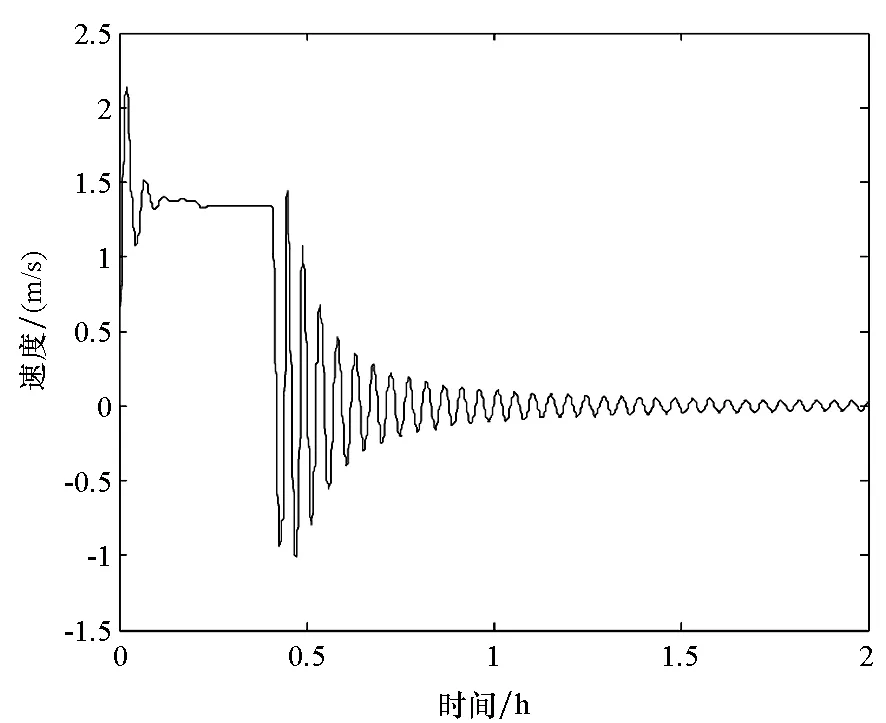
(b) 速度变化(b) Speed changes图3 高度调控上升过程Fig.3 Ascent process of altitude control
2.3 能源模型
2.3.1 能量消耗
浮空平台总功率需求为:
Ptotal=Py+PT+Ppl+Pcontrol
(15)
式中,Py为高度调控功率,PT为推进分系统功率,Ppl为载荷功率,Pcontrol为控制系统、测控系统等航电功率。
浮空平台一天能量消耗为:

(16)
浮空器高度调控过程中,利用鼓风机克服压差做功,将空气充入副气囊。鼓风机功率Py计算公式[17]为:
Py=qmy
(17)
(18)
其中:qm为质量流量;v1、v2分别为鼓风机入口和出口空气的速度。
浮空器区域驻留过程中高度调控总耗能
(19)
2.3.2 产能供能
太阳电池水平放置,单位面积太阳电池所受太阳辐射能量[18]为:
(20)
式中,In为单位时间内投射到单位面积上的太阳直接辐射能量,h为太阳高度角,t1为当天日出时间,t2为当天日落时间。
太阳电池实际发电量为:
Wcell=ηscqsSsc
(21)
式中,ηsc为太阳电池光电转换效率,Ssc为太阳电池面积。
储能电池存储能量为:
Wli=Wconvertηconvert
(22)
式中,Wconvert为太阳电池向储能电池提供的能量,ηconvert为太阳电池能量转换为储能电池能量的效率。
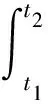
图4(a)给出了长沙(28°N,113°E)地区2015年10月16日太阳辐照能量变化,其中t1、t2分别表示日出、日落时间。图4(b)表示浮空器循环能源系统中能量状态变化情况。白天,太阳电池直接给系统提供能量,并将多余的能量存储到储能电池中;夜晚,由于没有太阳光照,由储能电池为系统提供能量,T1、T2分别表示蓄能电池关闭、开启时间。

(a) 太阳辐射能量(a) Solar radiation energy
(b) 循环能源系统状态变化(b) Changes of energy system status图4 能源动态图Fig.4 Diagram of energy dynamics
3 区域驻留仿真与分析
3.1 高空风场
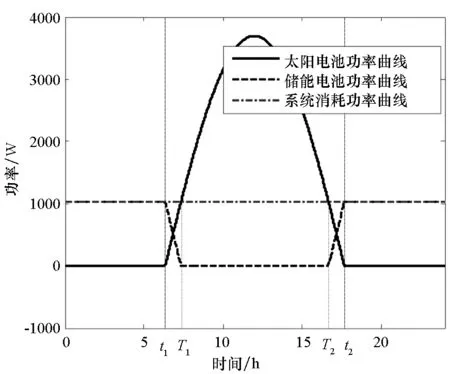
图5给出了长沙地区2015年10月16日—10月18日07:00的风场,其中东西方向风速以东为正,南北方向风速以北为正。风场数据来源于国防科技大学气象海洋学院的数值预报全球气象资料四维变分资料同化系统制作的高分辨率再分析产品。由图可知,在21 km高度附近,东西方向风场存在风向反转的现象,南北方向风速约为2 m/s。因此,为了实现在一定区域的长时驻留,需要对南北方向和东西方向均进行调控。

(a) 东西方向风速(a) Wind speed of east-west direction
(b) 南北方向风速(b) Wind speed of north-south direction图5 风场示意图Fig.5 Schematic of wind
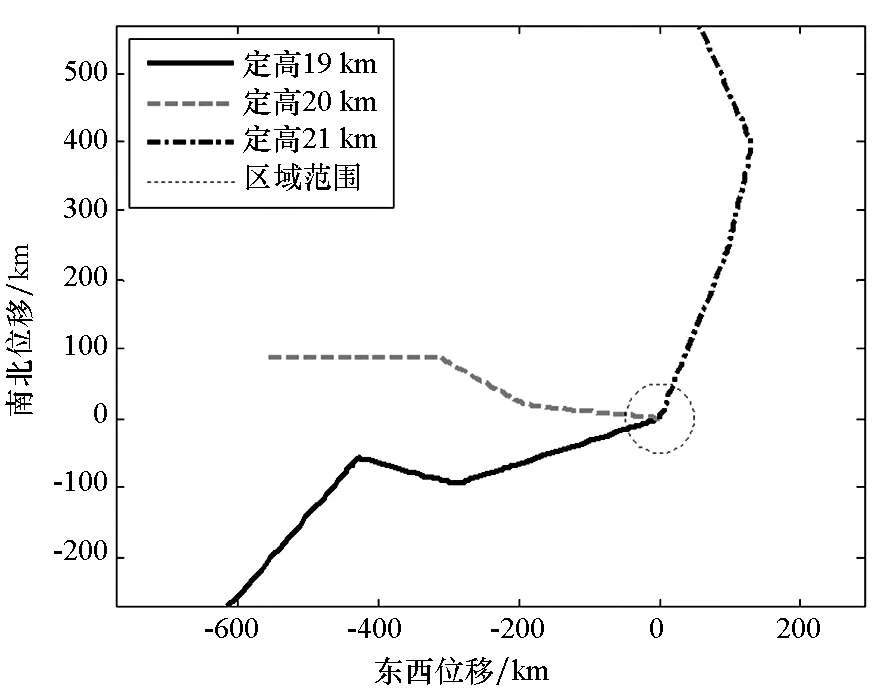
图6 不同高度的飞行轨迹Fig.6 Flight trajectories of different altitude
3.2 无控自由飞行
临近空间浮空器采用超压体制,可实现长时定高驻空。当不进行控制时,临近空间浮空器会随风场作用自由飞行。图6给出了临近空间浮空器在19 km、20 km、21 km驻空高度处无控自由飞行情况。由于风场的方向和大小随高度变化,在不同高度驻留的临近空间浮空器呈现出完全不同的飞行轨迹。由图可知,临近空间浮空器在19 km、20 km、21 km驻空高度上的总位移均超过600 km。在20 km高度附近,临近空间飞行器通过携带信息类任务载荷,可实现在特定区域上空的信息获取、支援和对抗等能力,可实现直径约400 km的地面信息获取覆盖面积、约800 km的地面通信覆盖面积。但是,临近空间浮空器在无控自由飞行模式下,600 km的漂移距离将严重地降低其实用性能。因此,临近空间浮空器的飞行控制策略是其实现区域驻留的重要条件。
3.3 区域驻留控制策略
3.3.1 基于飞行速度控制
基于推进系统速度控制主要是指在通过对驻空高度进行调控利用风场能量的同时,通过使用动力推进装置将南北方向上的飞行速度控制在某一特定速度范围内。图7~9为基于推进系统速度模式下的驻留轨迹和速度的仿真结果。

图7 基于速度控制策略的三维轨迹及投影视图Fig.7 3D flight trajectory and projection viewbased on flight speed limitation
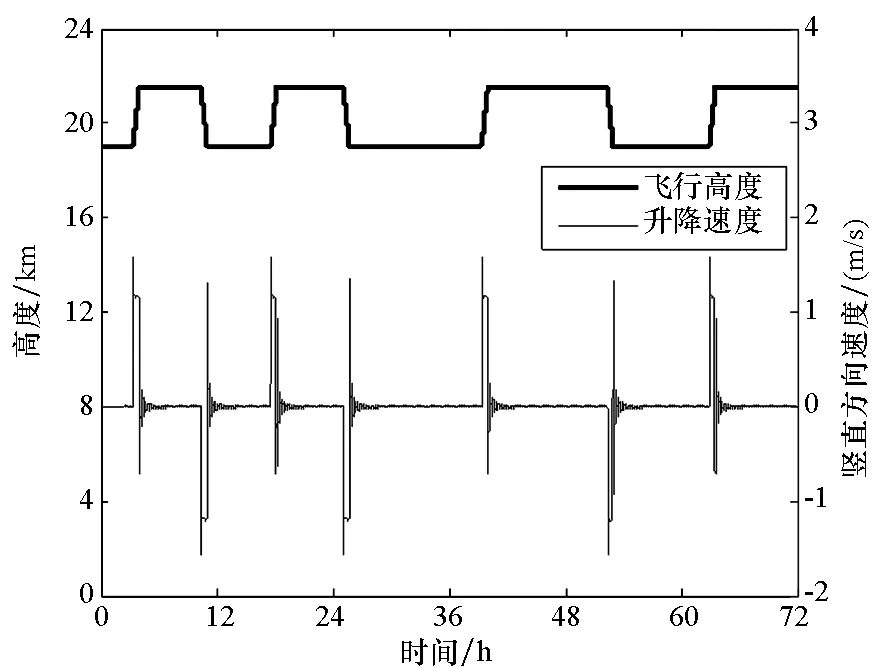
图8 基于速度控制策略的浮空器竖直方向运动状态Fig.8 Vertical state of the aerostatbased on flight speed limitation
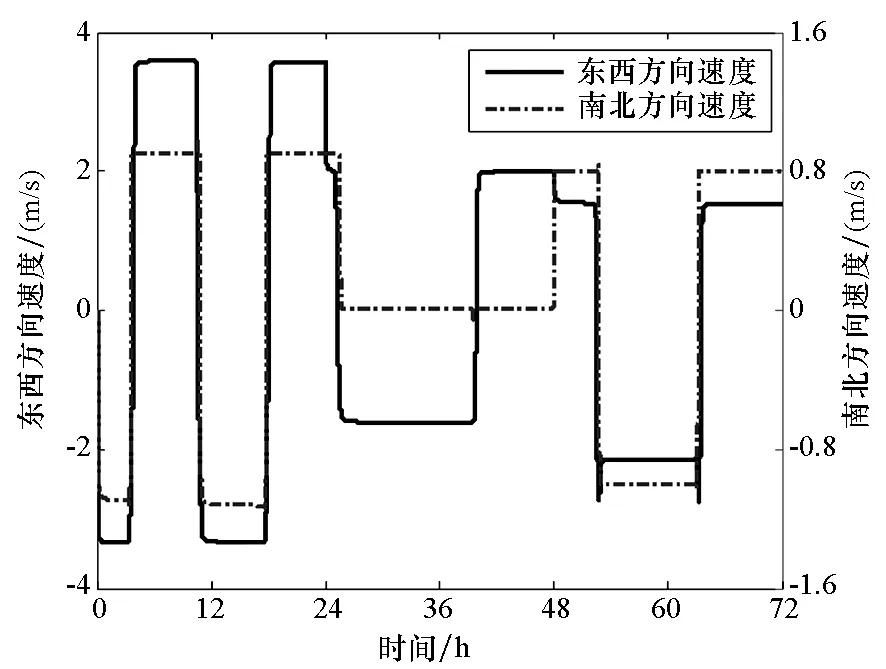
图9 基于速度控制策略的浮空器水平方向速度Fig.9 Horizontal flight speed of the aerostat based on flight speed limitation
如图7所示,临近空间快速响应浮空器最初驻空高度为19 km。对东西方向,在东风的作用向西飞行,当将要超出驻空范围时,通过高度调控,使其进入21.5 km的西风层,向东飞行,后面依此在东西方向的轨迹控制上反复进行高度调控(如图8所示);对南北方向,通过动力推进分系统将浮空器南北方向的速度控制在-1~1 m/s范围内,当南北风速小于该范围时,动力推进分系统提供的空速与风速一致,当大于该范围时则动力推进分系统提供最大设置推进能力(如图9所示)。
3.3.2 基于南北偏移位置约束
基于南北偏移位置约束控制的临近空间快速响应浮空器区域驻留策略,东西方向上的控制策略与基于推进系统速度控制模式类似,在南北方向上,设置浮空器的南北方向的飞行范围,当浮空器在南北方向上的位置接近设定范围时,动力推进分系统启动并抵抗南北风场的影响。图10~12为基于南北偏移位置约束模式下的驻留轨迹和速度的仿真结果。
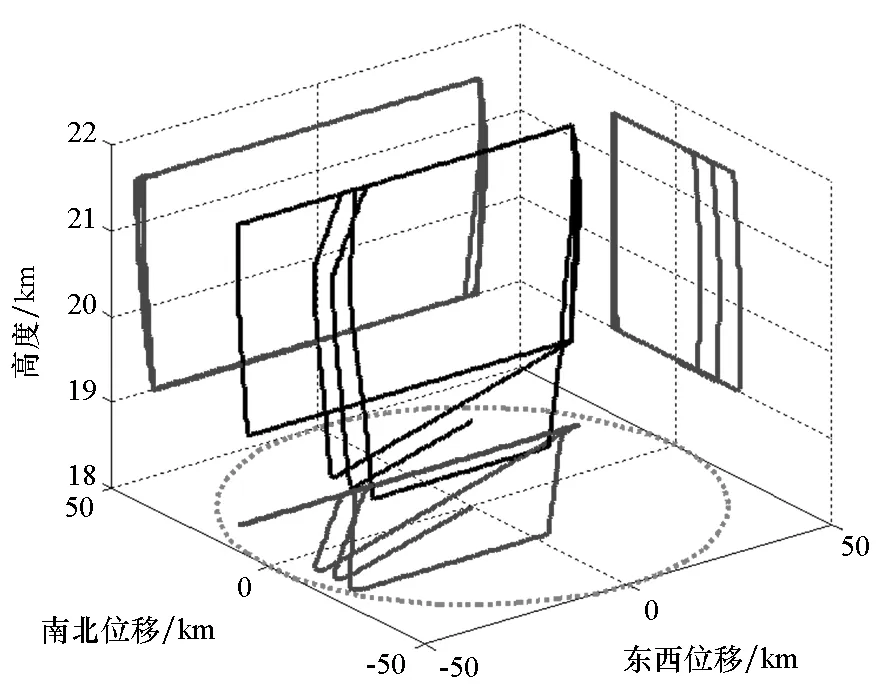
图10 基于南北偏移位置约束的三维轨迹及投影视图Fig.10 3D flight trajectory and projection view based on north-south displacement limitation
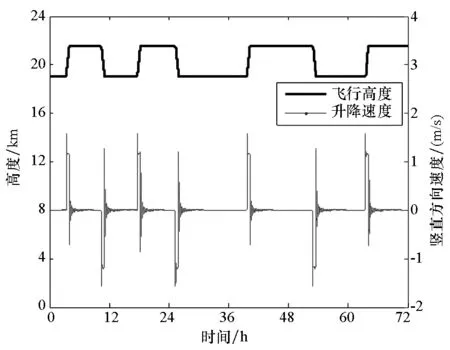
图11 基于南北偏移位置约束的浮空器竖直方向运动状态Fig.11 Vertical state of the aerostat based on north-south displacement limitation

图12 基于南北偏移位置约束的浮空器水平方向速度Fig.12 Horizontal flight speed of the aerostat based on north-south displacement limitation
如图10所示,临近空间快速响应浮空器工作在基于南北偏移位置约束控制模式时,南北方向通过动力推进分系统将浮空器的飞行范围限制在-20~20 km范围内。需要指出,南北方向限制范围的设置需要考虑区域驻留和能源消耗等前提,下面以两个特殊情况为例进行解释:①当南北范围取最小,即约束在通过驻空范围中心的东西方向直线上时,此时动力推进分系统需要不断克服南北风场影响,基本上一直需要工作,这将大幅提高系统对能源的要求;②当南北范围取最大,即以驻空范围边界为决策判断依据,此时动力推进分系统仅在浮空器接近边界时才工作,这将大幅减少东西方向的飞行空间,使得浮空器难以保持在指定的驻空范围内。
图11为临近空间快速响应浮空器的竖直方向运动状态。由于竖直方向的高度调控主要影响东西方向的飞行轨迹,因此基于推进系统飞行速度控制和基于南北偏移位置约束这两种南北策略对竖直方向的运动状态影响较小。
如图12所示,在基于南北偏移位置约束控制模式下,推进动力分系统仅在浮空器接近设置范围时才工作,且需要抵抗风的影响,因此抗风能力要求更高。
3.4 区域驻留动态能源分析
本小节对临近空间快速响应浮空器在上述两种区域驻留模式下2015年10月16日的动态能量问题进行分析,其中载荷和航电的功率为定值,高度调控和动力推进的功率与浮空器的工作状态有关。
基于飞行速度控制是指当风速较小时,浮空器可以随风自由飘行,当风速较大时,需要通过动力推进装置对浮空器飞行速度进行控制,避免其超出驻留区域范围,这种工作模式对动力推进装置系统的功率要求较低,但开启使用的时间较长;基于南北位置约束是考虑在南北方向上浮空器与驻留中心的距离,当距离较大时,通过动力推进装置抵消经向风场的影响,这种工作模式对动力推进装置系统开启使用的时间较短,但对动力推进装置系统的功率要求较高。
图13分别给出了两种工作模式下浮空器高度调控分系统和动力推进分系统的功率。风机仅在高度调控阶段开启,其工作功率约为40 W。基于飞行速度控制的区域驻留模式要求动力推进分系统较长时间内工作在较低动力水平(约50 W),而基于南北偏移位置约束控制的驻留模式要求动力推进系统在较短时间内工作在较高的动力水平(约90 W)。
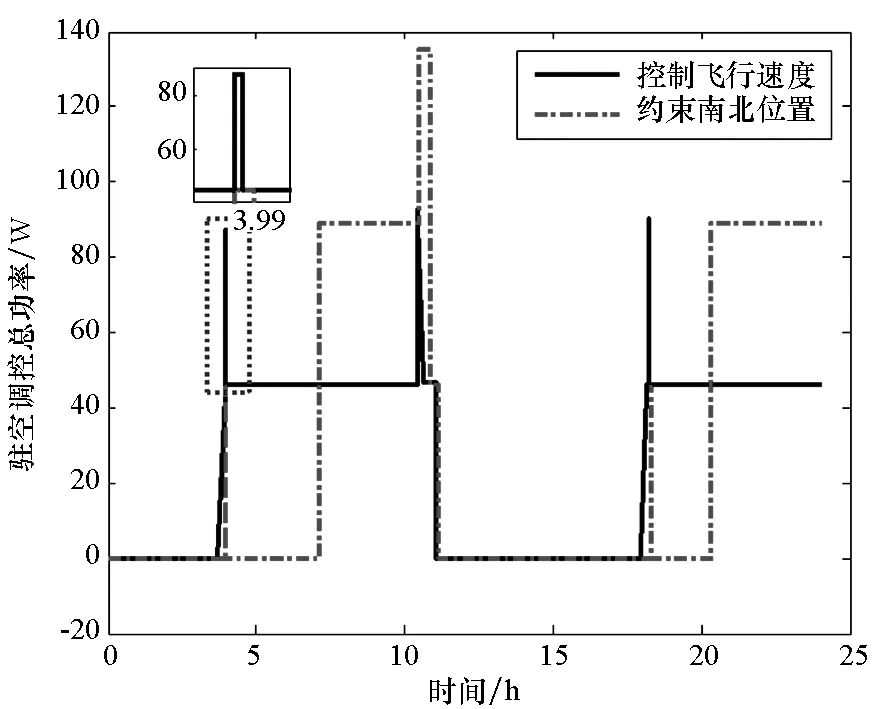
图13 总功率Fig.13 Total power
由图14给出临近空间快速响应浮空器在两种工作模式下的高度调控分系统和动力推进分系统的能源消耗。在同等利用东西风场情况下,基于飞行速度控制的区域驻留模式的一天总能耗约为613 Wh,其中夜间供能274 Wh;基于南北偏移位置约束控制的区域驻留模式的一天总能耗约为687 Wh,其中夜间供能327 Wh。因此,在本文研究的工作环境下,基于飞行速度控制的区域驻留模式能源消耗更低。
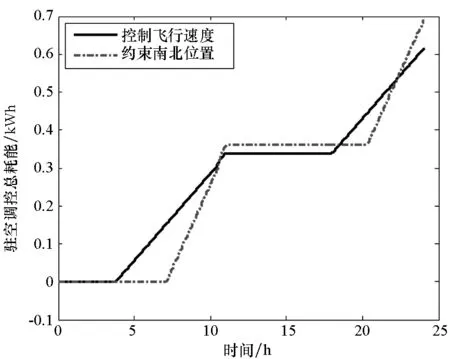
图14 总耗能Fig.14 Total energy consumption
4 结论
1)本文介绍了一种能够综合利用平流层风场环境的临近空间快速响应浮空器,介绍了其工作原理、系统组成及主要设计参数,建立了其在风场中的动力学模型和能源模型。
2)针对临近空间快速响应浮空器南北方向轨迹控制约束条件,提出了基于推进系统飞行速度控制和基于南北偏移位置约束控制的两种工作模式,并对浮空器在相应模式下驻空特性进行了仿真分析,结果显示这两种工作模式均能为临近空间快速响应浮空器提供区域驻留的途径。
3)对本文提出的两种工作模式进行了动态能源分析,结果表明基于推进系统飞行速度控制模式对能源要求和动力推进分系统的要求均低于基于南北偏移位置约束控制模式。