长时间处于地板辐射供冷环境中的人体热反应模拟研究
2019-03-19刘云亮周翔张莉莉
任 雁,刘云亮,周翔,张莉莉,张 旭
(同济大学机械与能源工程学院 暖通空调研究所,上海 201804)
0 引言
学者们对人体体温调节模型的研究约有 50年的历史,它是对人体体温调节系统的物理描述和数学模拟。一般可以将人体体温调节系统看成一个闭环控制系统,包括敏感元件、控制器、执行机构和受控对象等基本原件。模型根据环境和人体参数对人体温度分布进行模拟[1-3]。
随着电子计算机的出现和发展,体温模型的发展由简单至复杂,其应用也越来越广泛[4]。MACHLE等[5]建立的体温调节模型,反映了周围环境参数与人体体温的关系。在稳态热环境条件下的模型研究,经历了从最初的臂部换热模型到多节段多层人体换热模型长期的发展。GAGGE等[6]提出二节点模型,该模型将人体简化为核心层和外层皮肤两部分,该控制系统由皮肤感受器和核心感受器组成,给出了皮肤血流、出汗率和寒颤等的控制方程。GAGGE等[6]将此模型应用于热舒适研究,提出了标准有效温度的概念。STOLWIJK[7]首次提出了人体调节功能的六节段体温调节模型。此模型将头部视为球体,臂、腿和躯干视为圆柱体,每节段分核心、肌肉、脂肪和皮肤共4层。血液系统单独设为一个单元。模型中应用生理学的调定点学说进行数学描述,提出相应的控制方程及出汗蒸发散热、血管舒张和寒颤等调节机制,可以预测人体在动态条件下的皮肤温度。WISSLER[8-9]首次在模型中考虑了人体体温调节功能,提出体温调节包含 3种办法(比例调节、双位调节和被调对象的变化率调节)。此模型可以预测稳态的皮肤温度和核心温度,也可以用于预测动态的皮肤温度变化。WANG[10]利用GAGGE等[6]简化的二节点模型预测动态热环境下的人体皮温变化,所得结果与上述多节段多层模型并无显著差别。FU[11]提出了基于人体热平衡,研究了人体在动态热环境下的温度调节系统的三维有限元数学模型。NAKAMURA等[12]用40个受试者在室外 10 d的热反应来验证此模型结果的正确性。此模型需要求解三维皮温的有限元分布参数,未考虑气流脉动特性对人体散热量的影响。
Berkeley Comfort Model热舒适模型是目前通用的热舒适模型之一,能够详尽地分析在复杂且不均匀瞬态环境中的人体体温调节和热反应变化,可用于不同环境暴露下的人体热反应预测[13]。模型主要由两部分组成:根据人体-环境传热确定的人体生理调节热反应模型和根据皮肤温度和核心体温确定局部和整体热感觉模型。人体生理调节热反应模型以20世纪60年代末为NASA开发的Stolwijk多节段人体体温调节模型为基础,对原模型进行了4部分的修改,包括细分身体节段、改进血液流动、服装热阻和辐射传热模型。研究人员可通过设定房间空气温度和墙面温度来计算人体与周围环境间的对流和辐射传热,以确定不同时刻下的皮肤和核心体温。随后以人体生理调节模型得出的皮肤和核心体温为基础,并根据伯克利给出的经验公式[14]预测不同时刻下的人体局部和整体热感觉。
辐射空调具有良好的热舒适度,已逐步应用于工程实践[15-19],由于Berkeley Comfort Model在模型建立时,并未使用辐射空调环境特别是辐射地板供冷条件下的热舒适实验数据进行验证,本文通过该模型计算得出在长时间暴露于地板供冷不对称辐射环境中的人体皮肤温度和热感觉变化预测结果,采用本课题组在地板供冷环境下的皮肤温度、局部热舒适和整体热舒适实验数据,通过实验值和模拟值的对比,验证该模拟软件在人体长时间暴露于地板供冷不对称辐射环境中的可适用性。
1 人体热反应模拟参数设置
该模型的参数设置主要包括房间尺寸设置、人员状态设置和室内温度设置3部分。本模拟参数以同济大学人工环境舱人体热反应实验[20]中的实际情况为设定基础。
1.1 房间尺寸设定
房间尺寸依据同济大学环境舱的内部实际尺寸。首先设定房间内部的长、宽和高尺寸,分别为东西向长4.2 m,南北向宽3.6 m,高为2.4 m,并在南墙上设置窗户。为室内办公人员设置办公桌,桌子尺寸根据实际实验中的办公桌尺寸设定,长 0.45 m,宽0.55 m,高0.7 m,以房间内南墙的左下角为基点,设置水平位移为1.65 m,竖直位移为0.9 m。图1所示为房间及人员建模。

图1 房间及人员建模
1.2 人员状态设置
模拟设置人员坐于房间正中心,脚部着地。该人员的生理状态依据同济大学环境舱中人体热反应实验[20]中受试者的基本信息进行设定。受试者的身高为1.74 m,体重为65.7 kg,年龄为19岁,性别男,皮肤颜色为黄色,活动状态为坐姿;即人体代谢率为1.05 met、服装热阻为0.6 clo、计算时长为8 h。
1.3 计算工况设置
按实验工况设置计算工况,空气温度为25.5 ℃,相对湿度为 50%,平均辐射温度为25.5 ℃,共采用4组不同的地板温度,控制其余5个壁面温度实现平均辐射温度的控制,实验中控制的各壁面温度如表1所示。其中,各壁面温度为环境舱内实测值。在所营造的不对称辐射温度范围内,通过对16名受试者9个部位的皮温进行测试和主观投票,观察受试者在8 h稳定暴露下的人体热反应变化。实验工况设计及详细结果见参考文献[20]。
2 热反应模拟值与实验结果对比
为验证该热舒适模型在地板辐射供冷环境中的人体热反应预测值的适用性,本文从稳定时间及热反应结果两方面将热反应模拟值与实验结果进行对比。
2.1 皮肤温度对比
2.1.1 皮肤温度稳定时间对比
图2~图5所示为4种工况下,实验测试得到的人体各部分皮肤温度随时间的变化规律和Berkeley Comfort Model模型模拟得到的人体皮肤温度变化规律的对比。由图2可知,模拟中局部与整体皮肤温度大约经过5 h后达到稳定,足部大约经过6 h,而在实验中局部与整体皮肤温度经过 4 h达到稳定。由图3可知,模拟中局部与整体皮肤温度大约经过5 h后达到稳定,足部大约经过6 h,实验中局部与整体温度大约经过3 h趋于稳定。由图4可知,模拟得到的局部与总体稳定时间为 4 h,而实验中除了足背和小腿的皮肤温度仍未完全稳定外,其余基本于2.5 h后趋于稳定。由图5可知,近似均匀工况,总体皮肤温度变化幅度很小,模拟值2 h后趋于稳定,实验中于0.5 h后达到稳定。由图2~图5可知,模型能够反映地板辐射供冷时,不同部位体温在不同室内环境下随着时间的变化规律,不对称辐射温度越大,稳定时间越长。经对比分析,模拟所得稳定时长大于实验值,差距为约1.5 h,二者略不一致。

表1 实验及模拟各工况的壁面温度

图2 工况1皮肤温度变化规律的对比
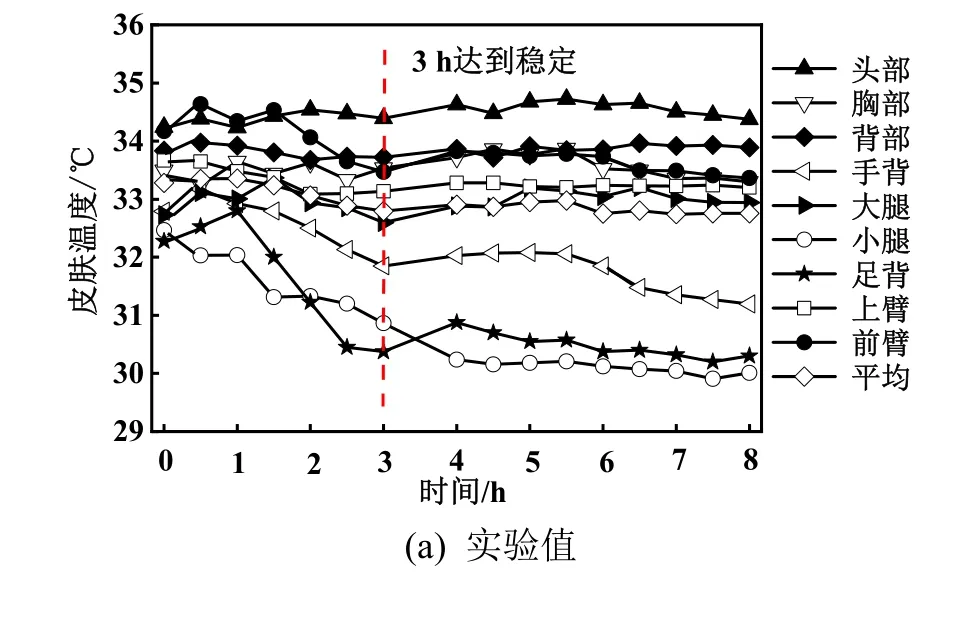

图3 工况2皮肤温度变化规律的对比
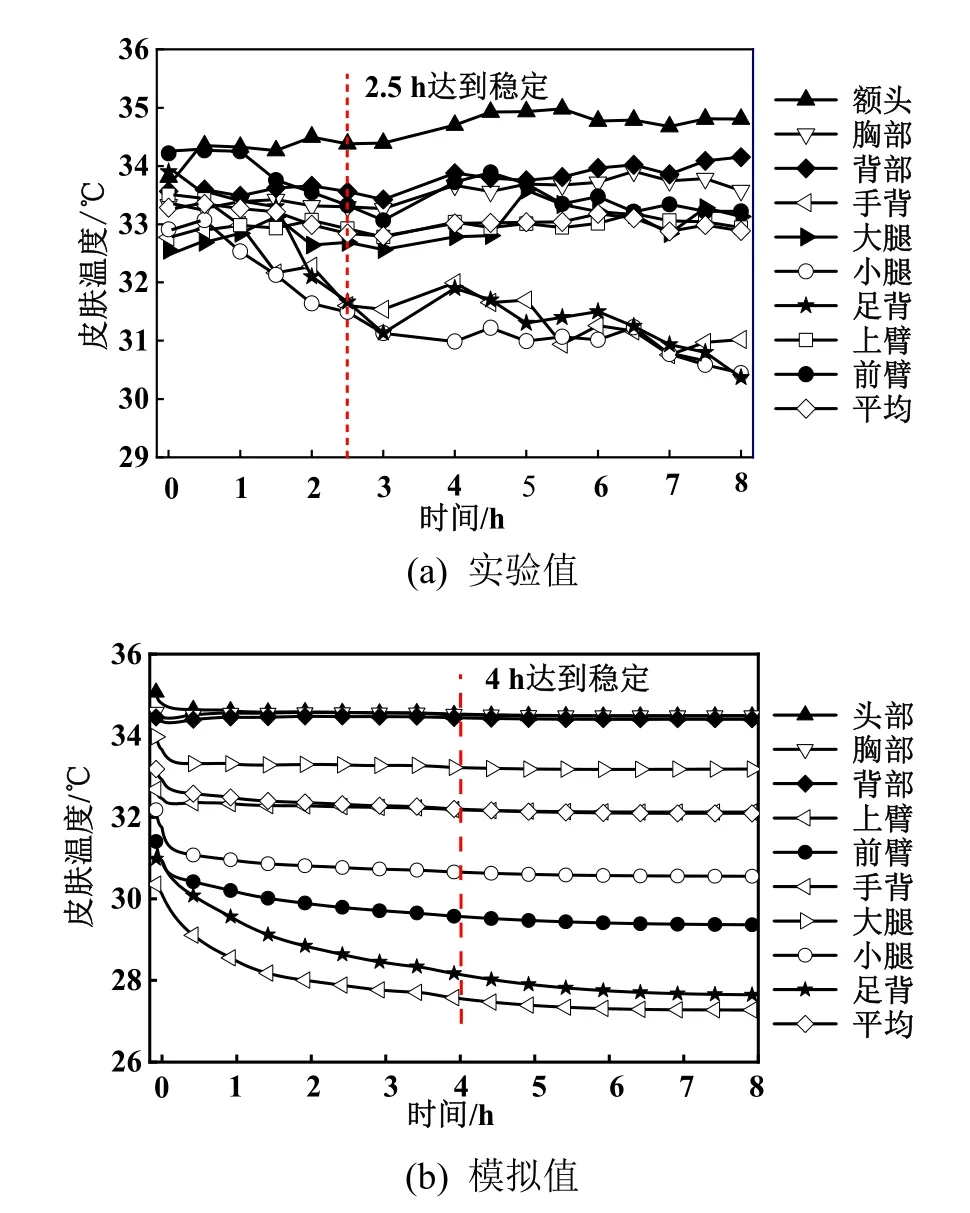
图4 工况3皮肤温度变化规律的对比


图5 工况4皮肤温度变化规律的对比
2.1.2 皮肤温度稳定值对比
在地板辐射供冷情况下模拟和实验的最后 2 h(6~8 h)中,人体皮肤表面温度处于稳定状态,选取最后2 h的热舒适模型模拟均值和最后2 h实验测试皮温均值作为长时间暴露下的结果对比。图 6所示为4种工况下局部与整体皮肤温度模拟与实验结果对比,差值为模拟值减去实验值所得结果,头部、胸部、背部、上臂、大腿、小腿和平均皮肤表面温度的模拟值与实验值偏差较小,在1 ℃以内,但前臂、手背及足背的皮肤温度偏差较大,在5 ℃左右。在后续工作中需要对该热舒适模型中局部如前臂、手背和足背的皮肤表面温度进行修正。

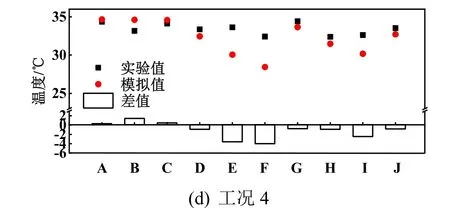
图6 局部与整体皮肤温度模拟与实验结果对比
2.2 热感觉对比
2.2.1 热感觉稳定时间对比
在目前的热舒适评价体系中,热感觉(Thermal Sensation Vote,TSV)的评分值及其对应的热状态如表2所示。

表2 热感觉TSV评分值及其对应热状态
图7~图10所示为4种工况下,实验测得的人体各部分热感觉随时间的变化规律与 Berkeley Comfort Model模型模拟得到的人体各部分热感觉变化规律对比。由图7可知,局部与整体热感觉大约经过5 h达到稳定,其中足部大约经过6 h才达到稳定,而在实验中局部与整体热感觉经过4 h达到稳定。由图8可知,模拟中局部与整体热感觉大约经过5 h达到稳定,足部大约经过6 h。实验中局部与整体热感觉大约经过3 h趋于稳定。由图9可知,模拟得到的局部与总体热感觉稳定时间为4 h,而实验中除了小腿的热感觉仍未完全稳定外,其余基本于2.5 h趋于稳定。由图10可知,近似均匀工况,局部与整体热感觉模拟和实验值均表现稳定,模拟值2 h后趋于稳定,实验值于0.5 h达到稳定。可知,模型能够反映地板辐射供冷时,不同部位热感觉随着时间的变化规律,不对称辐射温度越大,稳定时间越长。经对比分析,模拟所得稳定时长长于实验值,差距约为1.5 h左右,二者略不一致。从稳定时间和稳定值两个角度而言,热感觉模拟值与实验值的差异和皮肤温度模拟值与实验值的差异具有一致性,二者具有良好的相关性。这与热感觉模型的基本结构相关,局部热感觉由局部皮温、平均皮温和皮温变化率确定,当皮温偏差较大时,将使热感觉产生较大偏差。
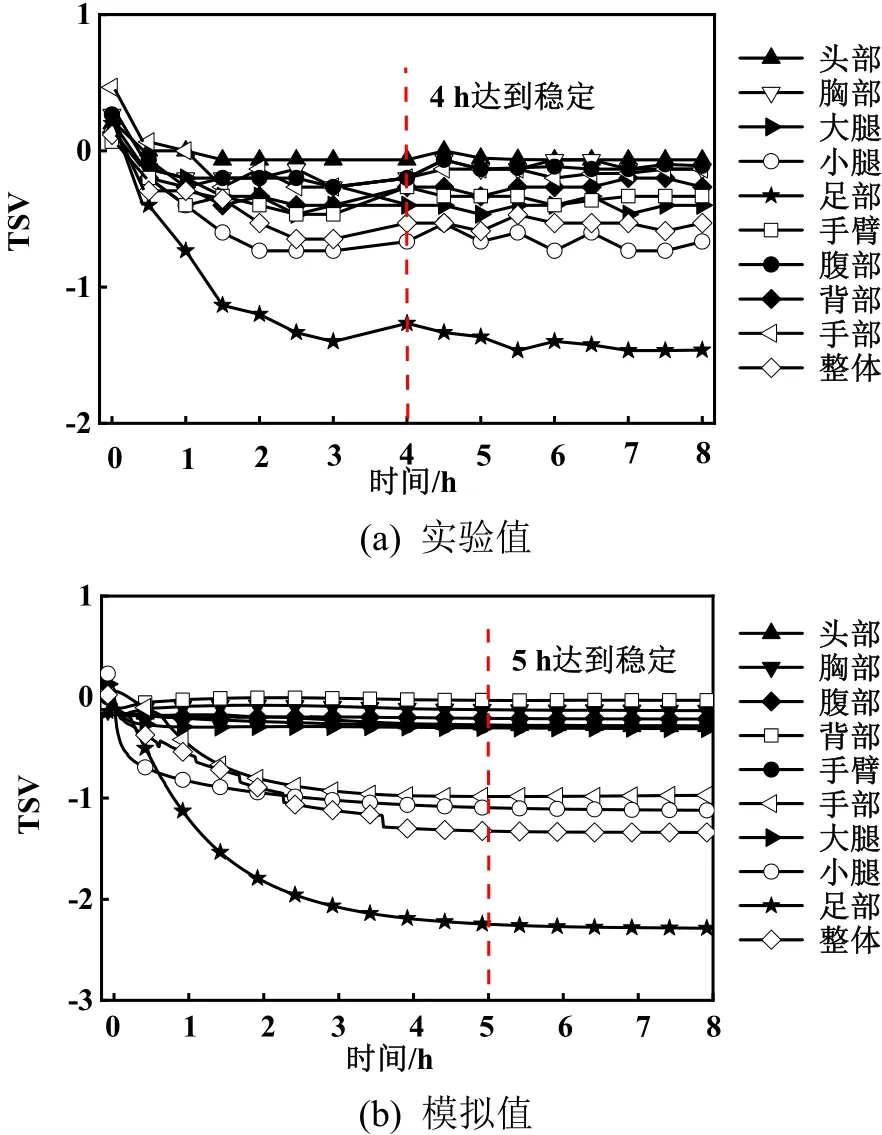
图7 工况1热感觉变化规律的对比
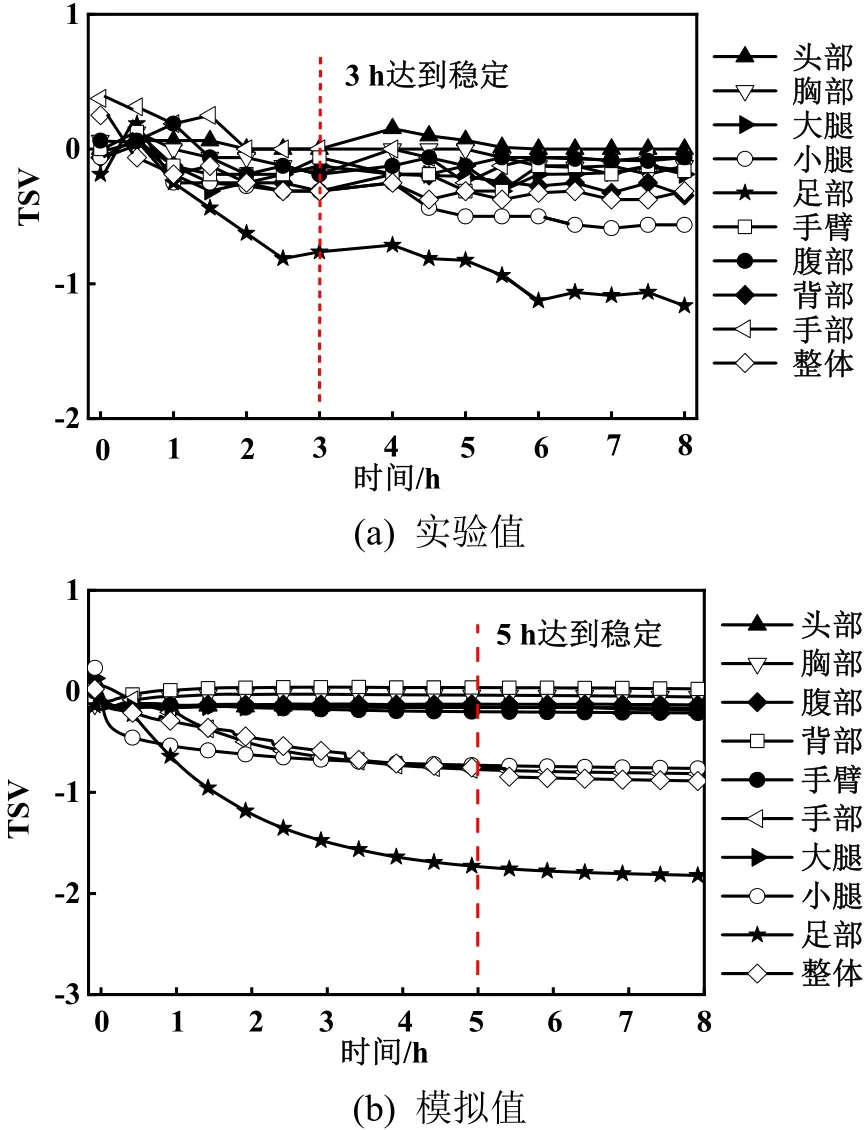
图8 工况2热感觉变化规律的对比

图9 工况3热感觉变化规律的对比
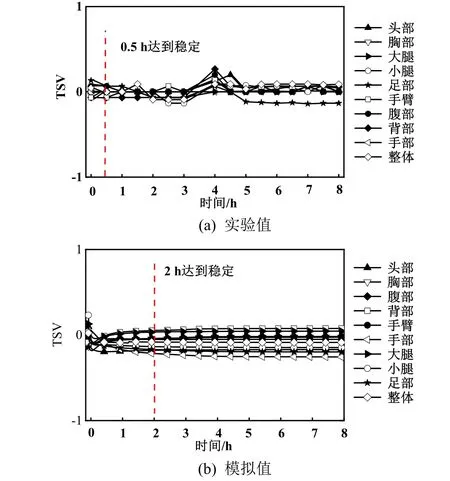
图10 工况4热感觉变化规律的对比
2.2.2 热感觉稳定值对比
在地板辐射供冷暴露情况下模拟的最后 2 h中,人体热感觉处于稳定状态。选取最后2 h的模拟均值和实验均值作为长时间暴露下的结果对比。图12所示为4种工况下,局部与整体热感觉模拟和实验的对比,差值为模拟值减去实验值所得结果。由图11可知,在地板辐射供冷工况中,手背、小腿和足背热感觉的模拟值和实验值偏差较大,其中手背和足背温差值在1左右。整体热感觉也存在偏差,但偏差较小,这是由于局部热感觉是计算整体热感觉的中间参数,局部预测的准确性对整体预测准确性产生影响。因此需要开展后续研究对该热舒适模型中的局部如手部、小腿和足部的热感觉模型及整体热感觉模型进行修正。

图11 局部与整体热感觉模拟与实验结果对比
Berkeley Comfort Model模型对于长时间处于辐射供冷环境下的人体热感觉预测不是非常理想,尤其在手和足等末端部位偏差较大。分析上述出现偏差的原因为:1)由于模型不能准确计算人员在辐射不对称环境下的传热过程,该模型多用于传统对流空调环境暴露下的人体热反应预测,对人体在不对称辐射环境下的辐射传热计算考虑得不完全,没有考虑人体和地板直接接触时足部的导热过程和桌椅对人与环境间的辐射传热产生的影响;2)该模型中肢体末端的皮肤温度计算可能存在一定偏差,人员肢体末端部位在静坐工作时也在保持一定的活动,特别是在局部偏冷环境下的颤抖、握拳、跺脚等动作也将影响其发热量,从而影响到该部位的皮肤温度;3)在不对称辐射环境下,局部热感觉与整体热感觉的整合关系,与传统的对流空调环境下可能也存在差异,而目前模型中所采用的皮肤温度、核心体温确定局部和整体热感觉的计算内核并不是通过辐射不对称环境下热舒适实验得到的,可能存在一定的偏差。
从皮肤温度和热感觉的模拟结果而言,皮肤温度的稳定时间和稳定温度的偏差,与热感觉的偏差较一致,存在一定的关联,可以推测是皮肤温度模拟出现的偏差主要导致了各部位的热感觉偏差。在后续的热舒适模型研究中,本课题组将从末端产热修正、辐射传热计算、足底与地板接触导热以及不对称辐射环境下局部不适对整体舒适性影响等方面对模型进行修正。
3 结论和展望
本研究以人工环境舱人体热反应实验中的实际情况为设定基础,采用伯克利热舒适模拟软件对地板温度为12、16、19和25.5 ℃的4组地板供冷工况下人体热舒适进行模拟,将所得的皮肤温度和热感觉结果与实验结果从稳定时间和稳定值两方面进行对比,验证该模型在辐射不对称环境下的适用性,得到如下结论:
1) 模型能够在一定程度上反映不对称辐射环境下的人体不同部位皮肤温度分布及动态变化过程,模拟所得到的稳定时长与实验结果较为接近。皮温实验稳定值与模拟稳定值对比,大部分部位偏差分布在-1.5~1.5 ℃之间,但前臂、手背和足背等部位偏差较大,偏差值超过2 ℃;
2) 该模型反映了不对称辐射环境下的人体不同部位热感觉随时间的动态变化过程,模拟所得到热感觉值稳定时长与实验结果较接近。热感觉实验值与模拟值对比,大部分部位偏差分布在-0.2~0.2之间,但手背和足背及整体热感觉偏差较大,尤其在地板温度较低的情况下,偏差接近-1;
3) 模型对于长时间处于地板辐射供冷环境下的人体热感觉和皮肤温度的预测,特别是地板供冷情况下的足底传热、辐射传热计算、辐射不对称环境下局部热舒适和整体热舒适的整合,需要开展后续研究进行修正和完善,为确定适宜的室内参数提供依据和预测方法。
