使用LAP激光系统实现CT引导下精准穿刺体表定位的方法
2019-03-15吴丛业时飞跃赵环宇陈飞
吴丛业,时飞跃,赵环宇,陈飞
南京医科大学附属南京医院(南京市第一医院) 肿瘤内科,江苏 南京 210006
引言
CT引导下穿刺是引流、组织活检、消融以及放射性粒子植入等技术的基础。精准的体表定位能够保证CT引导下穿刺的顺利进行。定位栅条作为一种常用工具,具有简单适用、操作方便等优点[1]。但在实际操作中,如需要术中定位或者多点穿刺等情况下,使用定位栅条反而繁琐复杂。采用可移动激光设备进行精准定位穿刺是一种可行的方法[2-3]。为了进一步完善数字化精准定位功能,本研究利用虚拟模拟Vsim工作站和LAP激光灯系统坐标功能,通过模拟操作和实践,证实外置激光系统能够用于CT引导下穿刺体表定位,方法简单可靠。本文将介绍本方法的具体应用。
1 材料和方法
1.1 材料
CT模拟机:西门子公司的SOMATOM Sensation Open CT模拟机,配备CIVCO全碳素平板床、主机、辅机工作站以及具有虚拟模拟功能的Vsim工作站。激光定位系统:LAP公司的DORADO3系统,该系统包括3支激光灯,CT机架两侧两支激光灯投射水平位激光线,可沿患者腹背方向运动;机架上方天花板上激光灯投射矢状位激光线,可沿患者左右方向运动,激光灯运动由台式电脑上Keypad Emulation 1.0软件控制。WPS办公软件包中的WPS表格,版本为WPS 10.1.0.6690。
1.2 坐标系的建立
(1)P(Patient)坐标系。采用Vism工作站中坐标系,单位为cm。工作站中坐标系方向和患者体位相关,患者取仰卧位头朝机架(Head First-Supine)时,坐标系方向如图1所示。为简化计算,无论患者实际为何种体位,可在CT主台工作站中均设定为仰卧位头朝机架方向。参考既往研究[4],在患者体表同一横断面贴三个铅标记点,以其所确定坐标系的中心点为原始等中心点,用M表示。
(2)L(Laser)坐标系。L坐标系的原点用O表示;坐标系方向如图1所示,单位为mm。在实际操作中,通过Keypad Emulation 1.0软件设定O点坐落在M点上,使P坐标系和L坐标系建立联系;P坐标系和L坐标系转换时需要单位转换。

图1 外置激光系统、CT模拟机、L坐标系和P坐标系
(3)初始CT床位。CT床垂直高度(Superior-Inferior,Vertical)用VRT表示;前后方向位置(Anterior-Posterior,Longitude)用LNG表示;单位为mm。在患者体表同一横断面贴三个铅标记点,此时床位为O/M点床位y(Couch, M),用CT机架上显示的LNG值表示。
(4)体表定位点。Vsim工作站中确定体表穿刺点(Surface Puncture)为S(n),n为穿刺点的序号。在Vsim工作站中,可以自动显示M点和S点坐标,代入WPS表格得出S点相对于M点的位移:

设定L坐标系的O点坐落在P坐标系的M点上,M为原点,故L坐标系中初始x(L,M)、y(L,M)和z(L,M)均为0 mm。激光灯在L坐标系中的位移:
因激光灯不能在头脚方向移动,移动CT床代替L坐标系y轴方向。在L坐标系中:

(5)体表穿刺点为L坐标系三条轴的交叉点。左右方向为x轴,输入x(L,S)值控制激光灯C投射“十”字线;头脚方向为y轴,输入y(Couch,s)控制CT床移动;上下方向为z轴,根据穿刺点在体表左右,输入z(L,S)控制激光灯A(穿刺点偏机架左侧)或激光灯B(穿刺点偏机架右侧)投射“十”字线。
1.3 工作表的制作
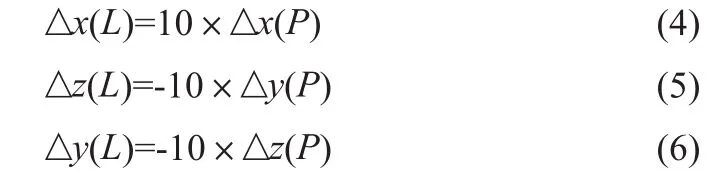
使用WPS工作表公式编辑功能,制作了专用的WPS表格。该工作表包含医疗信息和穿刺点数据输入计算两大部分。不同的背景填充颜色由不同的含义:蓝色表示输入,茶色表示不需要输入,浅绿色表示最终的位置计算结果。公式(1)(2)(3)对应的在WPS中的输入方式分别为:E17=B14=B13-B12,E18=E14=E13-E12和E20=H14=H13-H12。公式(4)(5)(6)对应的在WPS中的 输 入 方 式 分别为:H17=10×E17,H18=-10×E20和H20= -10×E18。公式(7)(8)(9)在WPS中的输入方式为:K17=H17,K20=H20和 K19=B19-H18=K10-H18。具体工作表,见图2。
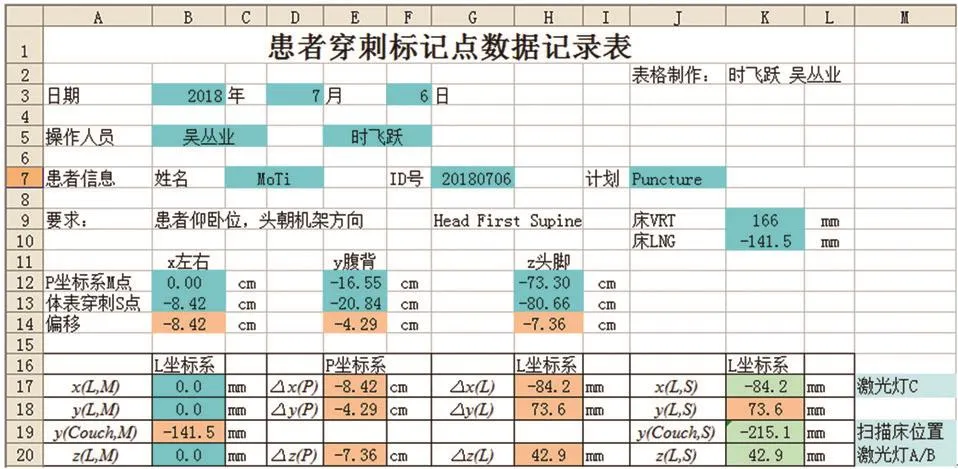
图2 用于计算体表定位点参数的WPS表格
2 应用步骤
使用上述方法确定患者体表定位点的具体应用方法如下:
(1)患者保持固定体位在CT模拟机上,使用激光灯在同一横断面投射出三个“十”字交叉点,A、B激光灯投射出的交叉点在同一水平高度。在患者体表标记出并贴上铅粒,作为原始等中心点M的体表标记。输入此时床VRT和床LNG值。为避免铅粒占据穿刺位点,该横断面尽量不在拟穿刺区域内。
(2)对患者进行CT扫描。将扫描的CT图像传到虚拟模拟Vsim工作站。Vsim工作站中根据患者体表同一横断面三个铅标记点,得出P坐标系中M点的坐标(图3)。

图3 Vism工作站中设定P坐标系M点坐标
(3)在Vsim工作站中确定体表穿刺点,并记录S点坐标(图4)。

图4 Vism工作站中设定体表穿刺点S坐标
(4)M/O点坐标和S点坐标输入WPS表格,算出△x(P)、△y(P)和△z(P)。
(5)根据△x(P)、△y(P)和△z(P)换算出△x(L)、△y(L)和△z(L),进一步算出x(L,S)、y(L,S)和z(L,S)的值。
(6)将激光灯投射的三个“十”字交叉点与患者体表的三个原始“十”字线对准,此时L坐标系O点坐落在P坐标系M点上。
(7)y(Couch,M)由输入的床LNG值得出,自动换算出y(Couch,S)数值,操作CT床到该床位。
(8)根据具体穿刺位置,选择A、B、C三个激光灯,使用Keypad Emulation 1.0软件(图5)按(6)中数据驱动相应激光灯至对应位置,激光“十”字交叉点的体表投影即为穿刺点。
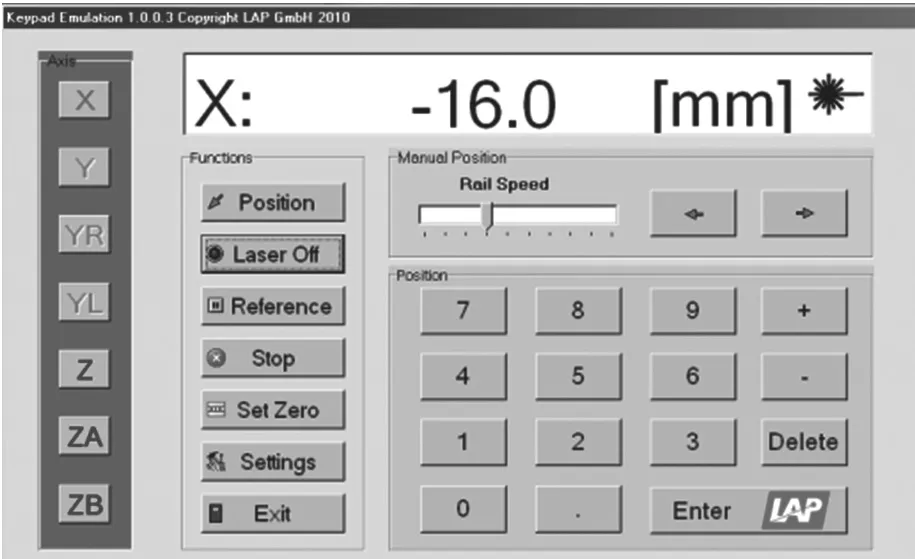
图5 驱动外置激光系统的Keypad Emulation 1.0软件
(9)如有多个穿刺点,从(3)重复开始。
3 讨论
本文介绍了可移动LAP激光系统在CT引导下精准定位穿刺中的应用。随着CT引导下微创治疗应用领域的推广,对精准定位穿刺的要求越来越高。传统使用的定位栅条,能够满足简单的定位需求[1]。但是在一些复杂操作,尤其是有多个穿刺点需要反复定位的情况下,高效、方便、精准的定位方式更为重要。可移动激光系统是外放疗定位的常用设备,具有操控简便、精准定位的优点[5]。张艳兰等[6]使用激光定位线和CT内定位线进行肺部精准定位穿刺。本研究在可移动LAP激光系统基础上,结合虚拟模拟Vsim工作站,进一步完善精准定位的功能。该方法主要分为三步:① CT扫描获取参考点与穿刺点,利用Vsim工作站坐标体系建立空间位置关系;② LAP激光系统坐标系原点取Vsim工作站中患者坐标系中心点,将激光坐标系和患者坐标系建立联系;③ 使用设计好的WPS表格计算3个方向的位移值,控制进出床和移动激光灯,实现体表穿刺点位置的标记。需要指出的是,LAP激光系统中两侧激光灯(A和B)默认始终保持在同一水平高度,根据体表穿刺点在患者的左右决定使用哪一侧激光灯。确认床位并调整好激光灯后,理论上,激光灯C投射“十”字交叉点和激光灯A/B投射“十”字交叉点重合。由于体表结构弧度形态,靠近胸骨中线的穿刺点优选顶端激光灯(C)投影,靠近腋窝中线的穿刺点优选侧位激光灯A/B投影。
CT引导下微创治疗应用领域越来越广泛。在放射性粒子植入、多点穿刺引流或活检、术中再定位等复杂操作情况下,本文介绍的方法可以避免手术区域再消毒、重复扫描CT等潜在问题。在术前一次性贴好标记点,利用模拟软件进行坐标转换,调整外置激光灯系统即可精准定位。体表标记点是介导患者坐标系和激光坐标系统的重要因素,需要工作人员精准细致的操作。另外,体表标记点尽量不要贴在拟手术区域,避免产生占位影响操作;但如果离手术区域过远,体表标记点轻微误差可能导致较多的偏离。医师和其他工作人员在操作前要仔细阅读患者CT图像,规划好操作初步计划。
目前,利用三维导航技术、数控穿刺引导仪以及穿刺固定仪等技术设备提高穿刺精准性的方法也在探索应用中[7-9]。本研究不同之处是将患者坐标系和外置定位坐标系结合到一起。如果将机械臂等设备结合到一起,在虚拟模拟工作站中制定治疗计划,不仅能够定位,而且可以实现数字化操作,达到精准治疗的目的。图像引导下微创治疗是一个广泛的概念,在颅脑外科、脊柱外科等微创手术中也发挥重要作用[10-12]。随着CT及图形引导技术的成熟,越来越多的手术可以利用微创方式完成[13-15]。
在人工智能日益推广的大环境下,CT引导下微创治疗正向数字化精准方向快速迈进[16]。本方法借助外置激光系统,实现了CT引导下微创治疗精准定位的目的,既可以作为一种简单方法直接应用,也可为其他微创技术提供参考,在CT引导下精准定位中发挥相应的作用。
