一种基于BDS的个人救生终端设计与实现
2019-03-11朱徐华孟祥飞
朱徐华,孟祥飞
(中国兵器装备集团上海电控研究所,上海 200092)
1 引言
我国是渔业大国,海洋渔业水域面积300多万平方千米,渔业船舶28.14万多艘,从事渔业生产的渔民有1000多万人。海洋渔业特点决定了海洋渔业生产是高风险、高危事故高发的行业。目前,大部分海员出于海面无信号覆盖、个人卫星通信费用昂贵、无法自由使用船载公用卫星通信设备等原因,缺乏合适的通信渠道与家人和朋友保持联系,可以说,通信是绝大多数航海及相关行业从业人员都面临的重要难题之一。
北斗卫星导航系统是我国自行建立、具有自主知识产权的卫星导航定位系统,具有定位、双向短报文通信和授时等功能。目前,北斗短报文通信功能在保障通信和应急通信领域得到了广泛的应用。北斗系统的信号范围已覆盖整个亚太地区,根据国家北斗系统建设战略,2020年北斗系统信号将覆盖全球,具备全球短报文能力。
从现有文献上看,文献[1]采用了北斗二代定位及无线通信相结合的方式,设计了一种落水人员报警终端,但是无线通信距离受限;文献[2]采用了北斗短报文功能实现了落水终端的设计,由于完全采用北斗一代定位与通信,定位精度不高,在终端低功耗设计方面也没有涉及。
为有效地保障渔民生命财产安全和渔民的利救生终端主要由外壳、天线、主控板、电池、落水检测线等组成,其中,主控板包括LNA单元、RDSS射频收/发单元、RDSS基带处理单元、RNSS定位单元、MCU控制单元、电源管理单元等,如图1所示。天线和主控板组成主要定位功能的定位系统,将作业人员的定位数据反馈给救援中心。同时主控板和落水检测线组成落水报警系统,一旦作业人员掉入水中,终端会被启动并进入SOS位置上报求救模式。终端启动后在120秒内将报警信息发送给救援中心。

图1 系统组成框图
1.1 工作原理
救生终端在人员突遇险情时,可在人员落水后由落水检测线触点通过海水的导电作用启动终端进入SOS工作模式或者人员手动按压SOS键启动SOS工作模式。当救生终端进入SOS后进入自检,同时进行RNSS本地位置定位,当RNSS定位成功后,RDSS会将定位结果及人员信息指示灯相关信息发往救援中心,并按照预设的程序进行不间断的位置和求救信息上报。
救援中心在收到求救信息后立即告警并协助指挥人员组织搜救和引导搜救力量。北斗海洋搜救引导站配置搜救直升机等搜救力量与搜救指挥站联动,指挥人员可实时观察被救人员和救援力量的位置,协调统一行动。救生终端应用示意图如图2所示。
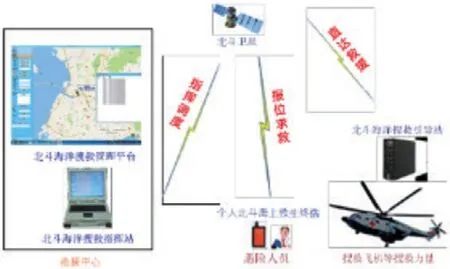
图2 救生终端应用示意图
2 硬件设计
2.1 RDSS收发及RNSS接收天线设计
RNSS接收天线和RDSS收发天线选用超天通信科技有限公司的CT-B1SL-21天线,其尺寸为40*40*7(单位mm),天线结构图如图3所示。该天线为无源天线,可实现北斗的B1、S信号的天线接收,L信号的天线发射,其采用介质板天线,并叠放在一起,这种结构可以减小天线占用的面积,集成度高。同时采用介质板可以降低设备的重量,安装方式采用打胶固定的方式,增强天线的安全性。馈点直接焊接到PCB板,减少了信号的损耗,提高了性能指标。

图3 天线结构图
2.2 主控板设计
主控板采用功能单元化的设计方法。首先按照功能将模块划分成LNA单元、RDSS射频收/发单元、RDSS基带处理单元、RNSS定位单元、MCU控制单元、电源管理单元,加上嵌入式软件及接口部分,共八个方面。其次,对关键的技术指标进行合理的分配,定义各单元的功能及指标要求。依据分配到功能及技术指标要求,设计各模块单元,以达到整机的设计要求。
功能单元化的设计方法有利于整机指标的分配及设计工作的规划。整机的布局更加合理,结构上可以隔离各个功能单元,有利于提高产品的稳定性、可靠性、环境适应性及电磁兼容性。功能化的设计能够满足整机的调测需求,对产品的维修性有很好的保障。
2.2.1 LNA单元
低噪声放大器单元包括:RDSS的S频点LNA及RNSS的B1、L1频点LNA。
(1)如图4所示,S频点LNA采用两级放大,三级滤波的方案。该方案可以有效的抑制带外干扰噪声如4G及Wi-Fi信号,噪声系数小,线性度高。
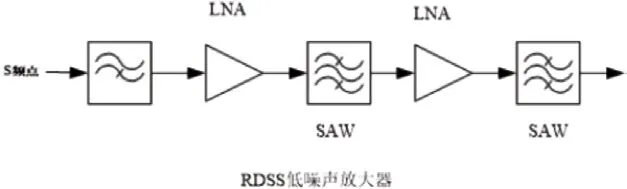
图4 RDSS低噪声放大器框图
(2)RNSS定位单元选用的是中科微电子ATGM336H-5N。由于该模块中已包含一级低噪声放大器,故本次方案中B1、L1频点的低噪声放大器采用一级滤波器+一级放大器,与RNSS模块内部的放大器共同构成B1、L1频点LNA,如图5所示。

图5 RNSS低噪声放大器框图
2.2.2 RDSS射频收/发单元
RDSS射频收/发单元采用江苏星宇芯联电子科技有限公司的专用RDSS射频SG801芯片。该芯片采用40脚QFN封装,尺寸为5mm*5mm*1mm。该芯片已经在多款北斗RDSS通信模块中应用,成熟稳定、可靠性高。其典型特征如下:
⊙ 两次变频接收机结构。
⊙ 支持10MHz,16.32MHz晶振输入。
⊙ GGC多中控制模式。
⊙ 模拟中频和数字中频两种输出方式。
⊙ 内部集成LDO。
⊙ 低噪声系数。
⊙ 高发射功率。
2.2.3 RDSS基带处理单元
RDSS基带处理单元采用成熟的芯片方案,选用772电子科技有限公司的BM3005,支持10个接收通道,1个发射通道,1PPS授时单元1个。该芯片功耗<200mW,工作温度-40℃~85℃,采用LQFP64封装。芯片应用简单,可靠、安全,集成度高。可实现RDSS系统指标:
⊙ 接收灵敏度:-157.6dBW(误码≤10-5)
⊙ 接收信息速率:16kb/s(I、Q支路个8kb/)
⊙ 接收通道数:10
⊙ 首次捕获时间:≤2s
⊙ 失锁重补时间:≤1s
⊙ 发射信号信息速率:8kb/s
2.2.4 RNSS定位单元
RNSS定位单元采用中科微电子ATGM336H-5N屏蔽罩模块,该模块具有高灵敏度、低功耗、体积小等优势。
该模块产品基于中科微第四代低功耗GNSS SOC单芯片——AT6558。AT6558支持多种卫星导航系统,包括中国的BDS(北斗卫星导航系统),美国的GPS,俄罗斯的GLONASS,欧盟的GALILEO,日本的QZSS以及卫星增强系统SBAS(WAAS,EGNOS,GAGAN,MSAS)。AT6558是一款真正意义的六合一多模卫星导航单芯片,可以同时接收六个卫星导航系统的GNSS信号,并且实现联合定位、导航与授时。该芯片已经很多产品上得到应用,方案成熟可靠。ATGM336H-5N主要性能参数见表1。

表1 ATGM336H-5N主要性能参数
2.2.5 MCU控制单元
MCU控制单元采用高性能的基于ARM® 32-bit Cortex®-M3 CPU(120 MHz max)的 STM32系列 STM32F205RC主控芯片,该芯片采用LQFP_64封装,内部集成256 Kbytes of Flash memory,同时支持6路异步UART口,48个可配置的GPIO,2组SPI接口,以及1路可配置的USB口,Industrial temperature range,–0 to 85°C,完成整机的功能控制。
STM32F205RC主控芯片采用外置8MHz高稳晶振,通过内部倍频电路倍频至72MHz作为内部工作时钟。
MCU外接大容量Flash存储器,用于存储接收的短报文,采集的经纬度、时间等位置信息。在低功耗设计方面,对LDO供电电路、电量检测电路、DC/DC转换电路、触水传感电路等方面均采用了低功耗设计思路。在非工作状态下,将ARM单片机置于休眠状态,并设计容错程序,当无意的按键操作(不达按键时长要求)唤醒单片机时,15s后进入休眠。经验证,进入休眠后待机电流小于10uA。在实际设计中,除了采用看门狗、定时复位等软件方法防止系统异常,还设置了组合健实现硬件复位功能,防止在MCU故障时系统无法关机和重启。
2.2.6 电源管理单元
该电路包括各模块的供电及电池的充电管理等。救生终端中各部分电路均是3.3V系统(除RDSS发射电路),因此可以直接由电池电压降压来供电,系统中每个功能模块均独立采用一个LDO来进行供电,消除相互间的电源干扰。
RDSS发射功放采用超级电容进行供电。通过升压DCDC升压至5V,通过设置其输出电流以恒流的方式给超级电容充电。待超容充满电后供每次PA发射时使用,使用完毕后由升压芯片对其消耗的能量进行补充。从而降低整机在发射时大电流对整机其它供电系统的影响。其设计框图如图6所示。
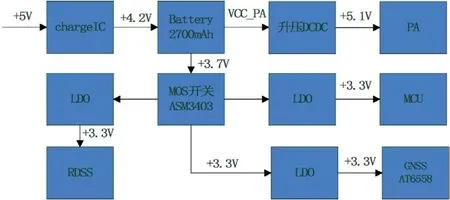
图6 电源管理单元设计框图
2.3 外壳设计
2.3.1 防水设计
救生终端的结构采取浸入密封式设计,当上下盒体合并时,对接缝处进行超声波焊接,从而起到防浸入密封的效果,开孔处贴上防水透气膜,用来平衡内外压强,这样形成了完整的密封圈,提升了产品的密封效果。
壳体上的导光柱、按钮及落水检测线同样设计了密封结构,其中导光柱和按键采用工艺方式直接固定在壳体上,通过工艺固定和防水胶涂覆的措施起到防浸入的密封效果。落水检测线采取O型圈密封方式,同样可以起到防浸入的密封效果。
2.3.2 防腐蚀设计
为了满足救生终端在含盐量较高的环境中使用的要求,产品外壳采用了工程塑料ABS,最大程度的满足防盐雾侵蚀的要求,同时对接触外界的落水检测线采用铍锌铜材质并在表面采取了镀金工艺,提升了金属零件在盐雾环境中的抗腐蚀能力。
3 软件设计
救生终端的嵌入式软件承担着整机信息处理和信息交互的任务,除具备开机系统自检及整机工作状态巡检功能外,还承担着数据融合及协议输出等功能。该软件是基于STM32F205芯片开发,在设计上采用状态机模式和消息响应机制。各子任务合理灵活的通过状态机机制调度各功能模块完成相应的处理,各消息响应模块通过协议解析层中的消息完成相应的工作,并通过发送消息调动其他模块完成协调工作,这样就使各功能模块间保持相对的独立,确保整个系统的稳定性。
3.1 软件功能组成
救生终端软件由系统硬件初始化、按键初始化、定时器初始化、电池模块初始化、RDSS模块、RNSS模块、USER模块、LED指示灯显示功能模块、系统自检处理、系统SOS模式、综合信息处理功能集合组成,见图7所示。软件功能模块说明见表2。

图7 软件功能组成框图

表2 功能模块说明
3.2 主要功能流程设计

图8 SOS位置报告流程示意图
系统启动后,首先进行系统初始化操作以及各子设备初始化操作,开启系统调度,各子任务按照实时异步的处理各自的业务,从而实现救生终端的相关功能。
3.2.1 SOS位置报告功能
通过落水检测线或者人工按键触发终端从休眠状态唤醒,进行RNSS定位并通过RDSS通信向救援中心不断发送报警信息。周期性的位置上报,用于向救援中心回报终端当前位置信息。详细流程图如图8所示。
3.2.2 低功耗功能
当RDSS数据发送完后,关闭系统资源,以达到省电的目的。当睡眠唤醒后,退出低功耗模式,调用系统各种资源。如图9所示。

图9 低功耗功能流程示意图
3.2.3 综合信息处理功能
综合信息处理模块,先判断自检按键是否有效,自检按键是否按下,SOS按键是否按下,启动电池AD采样,启动超容,RDSS/RNSS模组初始化,通信使能,LED状态指示,电池电量检测。见图10所示。

图10 综合信息处理功能流程示意图
4 试验测试结果
基于以上设计,救生终端实现了北斗定位、落水SOS自动位置上报求救、人工SOS自动位置上报求救、设备自检等功能。图11为救生终端外形图,图12为救生终端实物图,图13为救生衣佩戴示意图。
试验分为定位精度测试和报警成功率测试。
4.1 定位精度测试
在外场环境下对天测试,将两台被测终端放置于室外可良好接收卫星信号的已知坐标基准点处,开启人工报警功能,并统计2小时内监控平台接收到的经纬度信息。对水平误差进行统计分析,计算救生终端定位误差。经试验验证,两台终端的定位误差分别为5.8米和6.2米,满足系统指标≤10米的要求。
4.2 报警成功率测试
在外场环境下将救生终端装在救生衣内,一起扔到空旷海域,模拟落水的真实场景,选择2台救生终端进行72小时海上报警试验,统计72小时内救援中心监控平台收到报警信息成功率。试验结果,两台终端的报警成功率分别为95%和96%,满足系统指标≥95%的要求。图14为救援中心监控平台SOS报警与轨迹界面示意图。
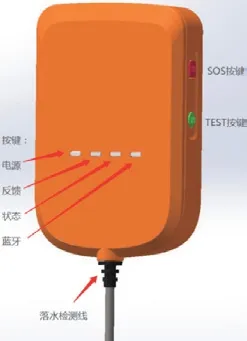
图11 救生终端外形图

图12 救生终端实物图

图13 救生衣佩戴示意图

图14 救援中心监控平台SOS报警位置与轨迹界面示意图
5 结束语
基于北斗的个人海上救生终端,结合了北斗RDSS通信与RNSS定位优势,采用了基于STM32芯片的低功耗设计,集成度高,便于携带,是一款在紧急情况下进行SOS求救的北斗救生设备。该设备可用于各类水上作业场所,能够显著提高应急救援的响应速度和搜救效率。