基于WOA算法的电动汽车感应驱动系统控制器的参数整定
2019-03-11张华磊吕江毅成林
张华磊,吕江毅,成林
基于WOA算法的电动汽车感应驱动系统控制器的参数整定
张华磊,吕江毅,成林
北京电子科技职业学院汽车工程学院, 北京 100176
为提高电动汽车感应驱动系统PID控制精度,将鲸鱼优化算法与PID控制相结合,提出一种基于WOA算法的电动汽车用感应驱动系统控制器参数整定方法。为了获取高质量的控制效果,选择误差绝对值时间积分性能指标为适应度函数。结果表明,在电动汽车电动机PID参数寻优过程中,与PSO-PID、GA-PID和PID相比,WOA-PID控制器的超调量更小和响应时间更快,控制品质更高,能够更快地进入稳定状态。
鲸鱼优化算法; 电动汽车; 控制器; 参数
随着纯电动汽车的发展,如何快速高效地开发电动汽车是当前研究的热点问题。纯电动汽车研发的关键技术主要有电动汽车整车技术、蓄电池技术、能量管理技术和电机及其控制技术。电动汽车的电机是其电气驱动系统的核心,电动汽车的性能直接由电机的控制技术、性能和效率决定。由于传统的PID (Proportion, Integral, Differential)控制算法可靠性高、稳定性好以及简单等优点,其被广泛地应用于工业控制领域,而传统PID控制的主要缺点在于其参数整定的适应性较差,由于电机系统的复杂性、非线性等问题,导致无法获得满意的控制效果[1]。
鲸鱼优化算法[2](Whale Optimization Algorithm,WOA)是受座头鲸捕食行为启发而提出的一种新型启发式算法,该算法具有调整参数少、操作简单和易于跳出局部最优能力强的优点。针对传统PID控制效果易受其参数选择的影响,提出一种基于WOA优化PID的电动
汽车感应电机驱动系统的控制器参数整定方法。研究结果表明,本文算法可以有效提高电机控制效果,具有精度高和误差小的优点。
1 鲸鱼优化算法
在WOA算法中,每只座头鲸的位置表示一个可行解,该算法具体描述如下[3]:
(1)环绕式捕食。座头鲸能够识别猎物的位置并进行包围。如果当前的最佳鲸群个体位置为目标猎物,则位置更新策略如下:=|·*()+()| (1)
(+1)=()-·(2)
其中,和为系数;为当前迭代次数;()为当前鲸鱼的位置向量;*()为当前最佳的鲸鱼位置向量。
和计算公式如下:=2·1-(3)
=22(4)
其中,1和2为随机向量,处于[0,1]之间;值由2线性下降到0。
=2-2/max(5)
其中,max为最大迭代次数。
(2)发泡网攻击。该阶段主要机制有收缩包围机制和螺旋式位置更新,通过座头鲸气泡网建立数学模型,具体描述如下:
1)收缩包围机制:该机制通过减小值实现,其中是随机数,处于[-2,2]之间;当处于[-1,1]之间时,新鲸群个体搜索位置是食物所在位置,此时鲸鱼靠近食物进行觅食;反之,则鲸鱼远离食物;

其中,¢=|*()-()|为第头鲸群个体当前最佳位置与猎物的距离;为随机数,处于[-1,1]之间;为对数螺旋形状参数。座头鲸在捕食猎物时,不但进行螺旋游动而且进行包围收缩,其在以50%的概率在螺旋模型和收缩包围机制之间进行位置更新,其数学模型为:

其中,为随机数,处于[0,1]之间。
3)搜索捕食:当>1或<-1时,鲸群将进行移动搜索远离猎物,借此寻找一个更加合适的猎物,突出WOA算法在全局搜索中的勘探功能,数学模型如下:
=|·X()-| (8)
(+1)=X-·(9)
其中,X为从当前鲸群中随机选择的位置向量,也就是随机鲸群个体。
2 基于WOA的PID参数整定设计方案
2.1 PID控制
一般地,典型的PID控制框图如图1所示:
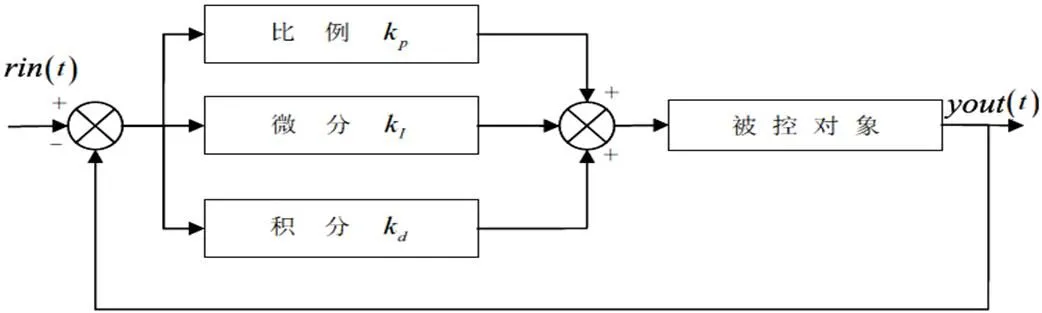
图 1 PID控制系统框图
PID控制器的偏差公式为:()=()-() (10)
其中,()、()分别表示输入值和输出值。
其中,K、T、T分别表示比例系数、积分时间常数和微分时间常数。
2.2 参数编码
令鲸群中的搜寻个体数量为,每个鲸群的位置矢量由PID控制器的3个参数构成[4],其矩阵表达式为:

3 实证分析

WOA参数设置如下:种群规模为30,最大迭代次数为100,其优化结果如图2和图3所示:

图 2 WOA优化PID适应度曲线

图 3 WOA优化阶跃响应曲线图
为了验证WOA算法进行PID优化的效果,将WOA与GA (Genetic Algorithm)和PSO (Particle Swarm Optimization)优化PID的结果进行对比,不同算法参数设置表1所示。不同算法的阶跃响应输出曲线和阶跃响应误差曲线进行对比,其对比结果如图4和图5所示。

表 1 不同算法参数设置
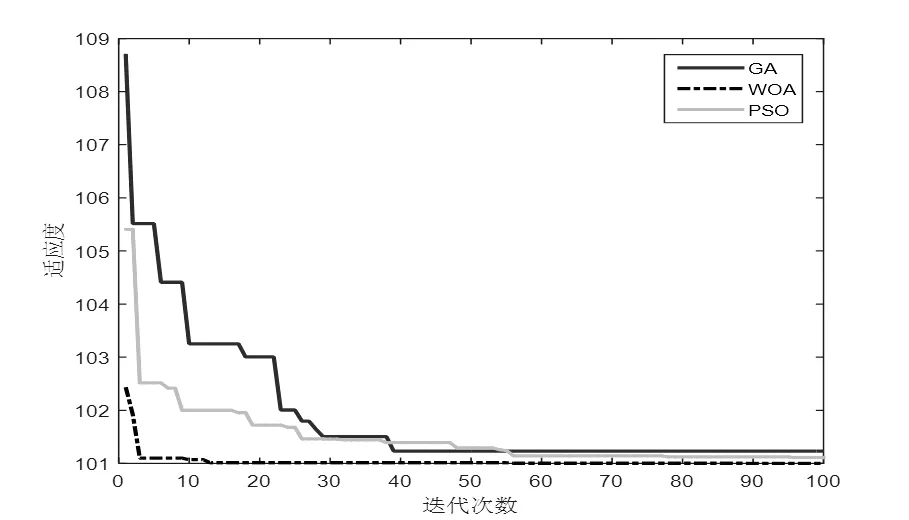
图 4 不同算法适应度收敛对比图
由图4可知,在电动汽车电动机PID参数寻优过程中,WOA算法与PSO算法和GA算法相比较,WOA算法具有更快的收敛速度,同时其优化结果也优于PSO算法和GA算法。

图 5 不同算法阶跃响应输出曲线
由图5不同算法阶跃响应输出曲线可知,WOA算法与PSO算法和GA算法相比较,WOA算法具有更低的误差,从而体现出WOA算法进行电动汽车电动机PID参数寻优的有效性和可靠性。

表 2 PID参数和适应度函数值
由表2适应度函数值可知,与PSO算法和GA算法相比较,WOA算法具有更高的精度,进一步验证了WOA算法进行电动汽车电动机PID控制的有效性和可靠性。

表 3 优化结果对比
由表3可知,与PSO-PID、GA-PID和PID相比,WOA-PID控制器具有超调量更小和更快的响应时间,控制品质更高,能够更快的进入稳定状态。
4 结论
由于电机系统的复杂性、非线性等问题,导致传统的PID控制无法获得满意的控制效果。为提高电动汽车感应电动驱动系统PID控制精度,将鲸鱼优化算法引入电动汽车感应电动驱动系统PID控制,提出一种基于WOA算法的电动汽车用感应电动驱动系统的控制器参数整定方法。研究结果表明,在电动汽车电动机PID参数寻优过程中,与PSO-PID、GA-PID和PID相比,WOA-PID控制器具有超调量更小和更快的响应时间,控制品质更高,能够更快的进入稳定状态。
[1] 张兴华,孙振兴,王德明.电动汽车用感应电机直接转矩控制系统的效率最优控制[J].电工技术学报,2013,28(4):255-260
[2] Mirjalili S, Lewis A. The Whale Optimization Algorithm[J]. Advances in Engineering Software, 2016,95:51-67
[3] Aziz MAE, Ewees AA, Hassanien AE. Whale Optimization Algorithm and Moth-Flame Optimization for multilevel thresholding image segmentation[J]. Expert Systems with Applications, 2017,83:242-256
[4] 刘和平,邓力,郑群英,等基于矢量控制的电动轿车感应电机驱动控制器[J].电工技术学报,2007,22(11):63-68
[5] 马文华,刘欣彤,刘海波,等.基于滑模观测器的电动汽车用感应电机驱动控制[J].微特电机,2017,45(7):68-73
Parameter Adjustment for Induction Drive System Controller of an Electric Vehicle on WOA
ZHANG Hua-lei, LV Jiang-yi, CHENG Lin
100176,
In order to improve the PID control precision of electric vehicle induction electric drive system, WOA-PID was presented to adjust parameters of an induction drive system controller on an electric vehicle. In order to obtain satisfactory excessive process dynamics, the error absolute time integral performance index was taken as the minimum objective function of the parameter selection. The results showed that the WOA-PID controller had smaller overshoot and faster response time and higher control quality than PSO-PID, GA-PID and PID in the optimization of electric vehicle motor PID parameters. It could get into a faster stable state.
WOA; electric vehicle; sensor; parameter
U469.72
A
1000-2324(2019)01-0163-04
10.3969/j.issn.1000-2324.2019.01.037
2018-02-06
2018-03-27
张华磊(1975-),男,硕士,讲师,主要从事汽车技术服务. E-mail:13520092245@139.com
