有限元分析在电机轴与摆臂夹紧连接中的应用
2019-03-07王江
王 江
(中国有色(沈阳)泵业有限公司,辽宁 沈阳 110144)
0 引言
电机是一种常用的动力执行装置,一般由机座、定子、转子等组成,转子两端为输出轴,通过键连接、螺纹连接、过盈装配等方式传递转动和转矩。
本文中电机输出轴为光轴,需带动摆臂转动,设计一种无损的连接机构,使摆臂与电机轴紧密连接。为保证设计的精确,使用了三维设计软件和有限元软件。
1 电机的参数
电机为直流步进电机,两相四线,步距角1.8°,输出轴为光轴,最大转矩0.8 N·m,轴径Φ6.35 mm,轴伸20 mm。
2 摆臂的结构设计
摆臂设计要求:不改变电机输出轴,电机与摆臂可多次拆装,摆臂随电机轴做轴向旋转,且在电机最大扭矩下不发生相对滑移。由于工件需拆装方便,因此不适合过盈装配,而采用了夹紧结构。摆臂远端结构有特殊用途,装配形式如图1所示,摆臂中间开孔消减应力,孔左侧对称面开槽预留夹紧空间,摆臂左下部开圆孔与电机轴配合,通过螺钉将两半孔与电机轴压紧,位置在轴孔偏上,一半螺纹孔一半光孔,孔两端铣平,实现电机轴和摆臂的固定连接。

图1 电机和摆臂的装配形式
具体参数如下:摆臂主体宽40 mm厚10 mm,消除应力孔Φ20 mm,左侧开槽2 mm宽,摆臂与电机的装配孔为Φ6.6 mm,孔深13 mm,外径Φ20 mm,压紧螺钉规格为M5。
3 有限元强度校核和压紧校核
要验证设计的合理性,需要借助有限元软件分析装配后的零件应力和接触压力。
有限元分析的基本概念是用较简单的问题代替复杂问题后再求解。有限元法的基本思路可以归结为:“化整为零,积零为整”。它将求解域看成是由有限个称为单元的互连子域组成,对每一个单元假定一个合适的近似解,然后推导出求解这个总域的满足条件,从而得到问题的解。这个解不是准确解而是近似解,计算精度高,而且能够适应各种复杂形状,因而成为行之有效的工程分析手段。在机械工程中,有限元法已经作为一种常用的方法被广泛使用。
线弹性分析是以理想弹性体为研究对象,所考虑的变形建立在小变形假设的基础上。在这类问题中,材料的应力与应变呈线性关系,满足广义胡克定律;应力与应变也是线性关系,线弹性问题可归结为求解线性方程问题。
而接触问题属于高度非线性分析,需要较大的计算资源,为保证计算准确而有效,理解问题的特性和建立合理的模型很重要。接触问题有两个较大的难点:(1)在求解之前,不知道接触区域,表面之间是接触或分开是未知的,随载荷、材料、边界条件和其它因素变化;(2)大多数接触问题需要计算摩擦,有几种摩擦类型需要设定,它们是非线性的,摩擦使计算的收敛变得困难。
本文有限元三维模型简化为电机轴、摆臂两个实体,进行静力学分析,如图2所示:电机轴的远端加全约束,摆臂远端加全约束,螺钉的两个夹紧面加大小相等方向相反的螺栓力1 500 N(6.8级M5螺栓的最大预紧力为4 800 N),电机轴与摆臂之间面接触,接触面为电机轴,目标面为摆臂内孔,材料为不锈钢,设定摩擦系数为0.3,摆臂轴孔处被2 mm槽一分为二,因此接触面为两对,且对称分布在槽两侧。有限元模型网格自动划分,高阶单元,节点数2万。
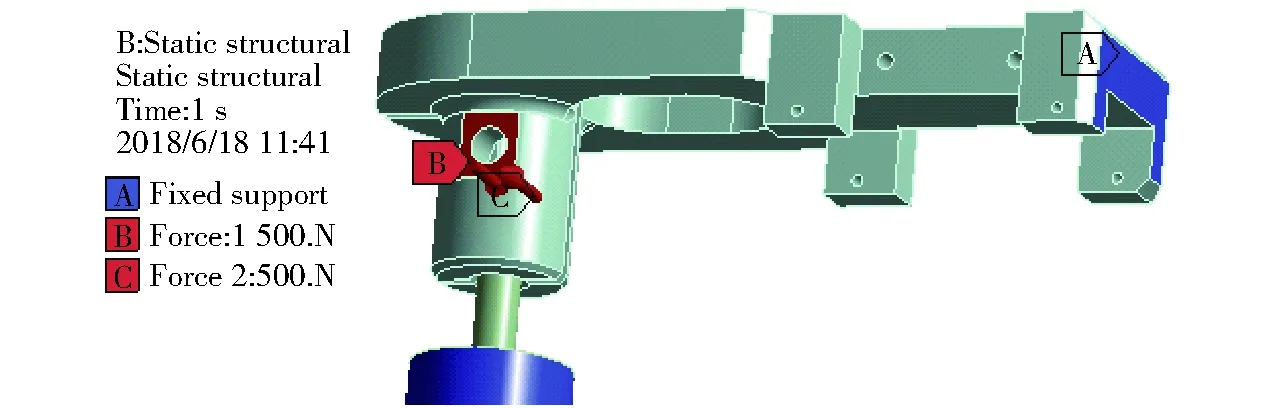
图2 有限元分析简化模型
经过有限元求解,摆臂的最大应力为181 MPa,如图3所示,低于材料的屈服强度,因此,摆臂的强度满足要求。

图3 电机和摆臂装配的应力结果
提取电机轴和摆臂接触面的接触压强,如图4所示,最大压强为76.4 MPa,位于接触面的中间位置,上下两侧压强逐渐减小,可以看出,摆臂与电机轴的接触情况比较理想,摆臂预留的间隙上下一起缩小;经测量,螺纹孔距摆臂主体中面的垂直距离为24 mm,螺纹孔距接触压强最大位置的垂直距离也为24 mm左右,即螺栓预紧力的一半由主体中间应力孔承担,另一半由接触面承担。
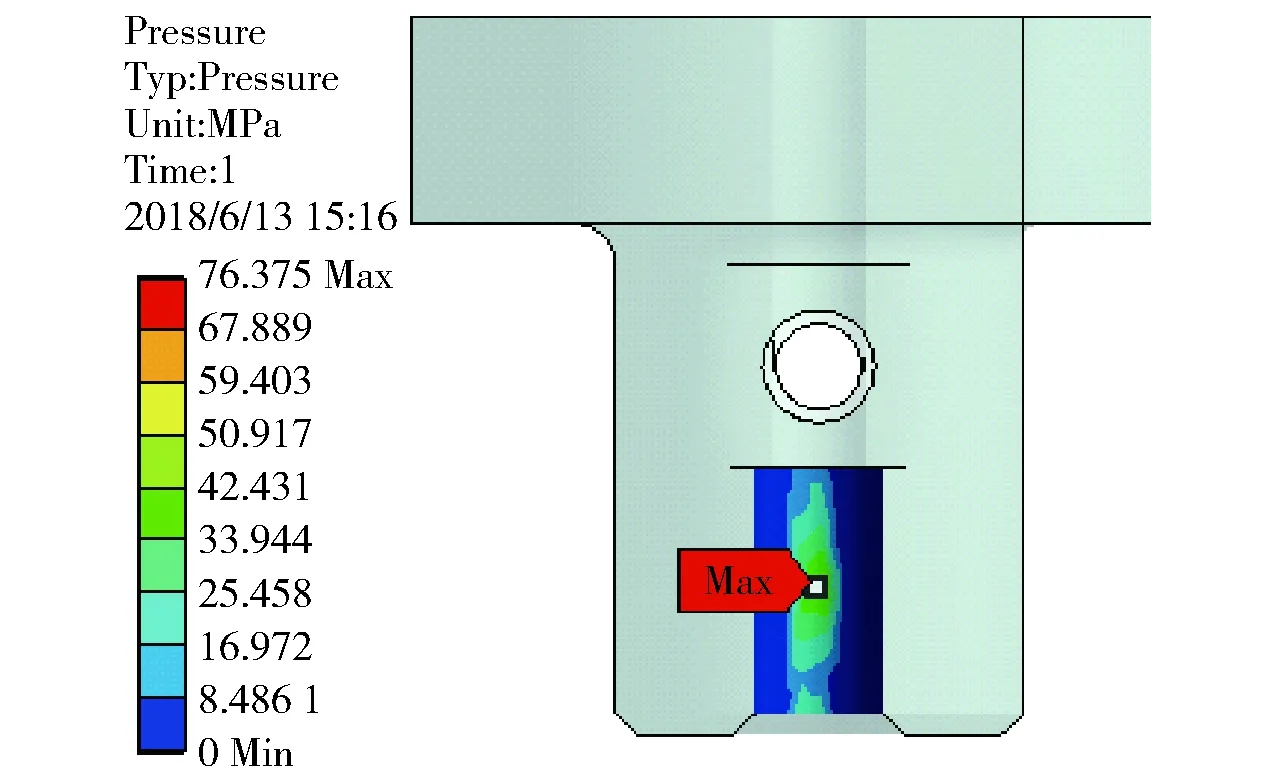
图4 电机和摆臂装配的接触压强
根据以上结果,可以校核摆臂与电机轴能否夹紧:
螺栓预紧力:Fv=1 500 N;
单个接触对的正向压力:N=Fv/2=1 500/2=750 N;
单个接触对的滑动摩擦力:F滑=μ×N=0.3×750=225 N;
克服摩擦阻力产生滑动所需力:F=2×F滑=2×225=450 N;
克服摩擦阻力产生滑动所需力矩:M=F×L=450×6.35/2/1 000=1.43 N·m;
由于电机提供的最大转矩为0.8 N·m,小于产生滑动所需力矩,因此电机与摆臂装配能夹紧不滑移。
4 安装要求及改进措施
为保证电机与摆臂连接的可靠性,即夹紧不滑移,必须要保证以下几点:
(1)用力矩扳手预紧螺钉,达到预定的安装力矩,以保证夹紧力,且不伤害零件;
(2)电机轴与摆臂装配孔表面不能有油渍、杂物,使摩擦系数尽量高,避免滑移。
如果安装使用过程中,由于未知原因发生了滑移,可以采用以下措施加以改进:
(1)适当提高螺钉预紧力至1 800 N或2 000 N,此时装配孔接触面位置上移,分配到接触面上的夹紧力将极大提高;
(2)在措施1基础上,可以在2 mm开槽内塞入1.8 mm厚左右垫片,起到保护应力孔和增加接触面夹紧力的作用;
(3)对电机光轴做轻微的打磨处理,以提高其表面的粗糙度,避免滑移。
5 总结
光轴连接应用较少,难度就在于接触压力产生摩擦力要大于转矩,通常用于一次性零部件。本文设计出可反复拆装的电机光轴连接结构,借助有限元分析验证了连接的有效性,且零件强度合格,达到了设计要求。
