一种升流型电流/电压转换电路的设计与仿真
2019-03-06王彦凯周学军
王彦凯,周学军,张 政
一种升流型电流/电压转换电路的设计与仿真
王彦凯,周学军,张 政
(海军工程大学电子工程学院,武汉 430033)
针对采用直流恒流供电的水下基础信息网络中的终端用电设备的供电问题,本文提出了一种新的电流/电压转换电路,能够使输出电流大于输入电流。设计合理的反馈控制电路,对输出电压进行反馈调节,从而达到所需特定电压。通过理论分析和电路仿真,验证了该方案能够实现升流和输出特定的恒压。
直流恒流 升流 电流/电压转换 PWM 水下基础信息网络
0 引言
长期以来,我国对海洋的观测通常是通过舰船、飞机和卫星等方法,这些传统手段获取的信息往往是表面的、零星的、短暂的。随着我国周边海洋安全形势日趋严峻和对海洋科研和开发的需要,传统的观测平台已经无法满足我国未来海上军事和海洋科研、开发的需求。与传统观测平台相比,水下基础信息网络能够将深海大洋置于人类的检测视域之内,不仅能对海洋进行长期、连续、不间断地观测,也具备实时检测和预警、通信能力,这对我国的科研和国防以及海洋资源开发都具有重大作用[1-4]。
水下基础信息网络由海光缆、数据传输设备、检测管理设备、终端设备以及其他辅助设备组成,这些设备都是有源设备,需要岸基电源进行供电。远程供电分为交流输电和直流输电,如果采用交流输电,海缆会与海地形成旁路电容和电感,影响系统稳定性,增大电能损耗。直流供电又分为恒流和恒压两种供电方式。与恒压相比,恒流供电具备故障自愈能力强,故障定位容易,扩展性好等优点,但水下的有源设备需要恒压源供电,如果采用恒流供电,就需要恒流源转恒压源的模块来实现对水下设备的供电[5-8]。
若转换模块的输出电流小于输入电流,就会限制输出功率,制约水下基础信息网络平台的实用性和扩展性,因此设计能够使输出电流大于输入电流的电流/电压(C/V)转换模块对于未来水下基础信息网络平台的发展具有重要意义。
1 转换电路总体设计
电路设计框图如图所示,额定输入为1.5 A直流恒流,目的是使输出电流大于1.5 A,并得到稳定的特定负载电压。通常由海底光缆对系统进行供电,常见的水下用电设备的额定电压有12 V、24 V以及48 V[9]。
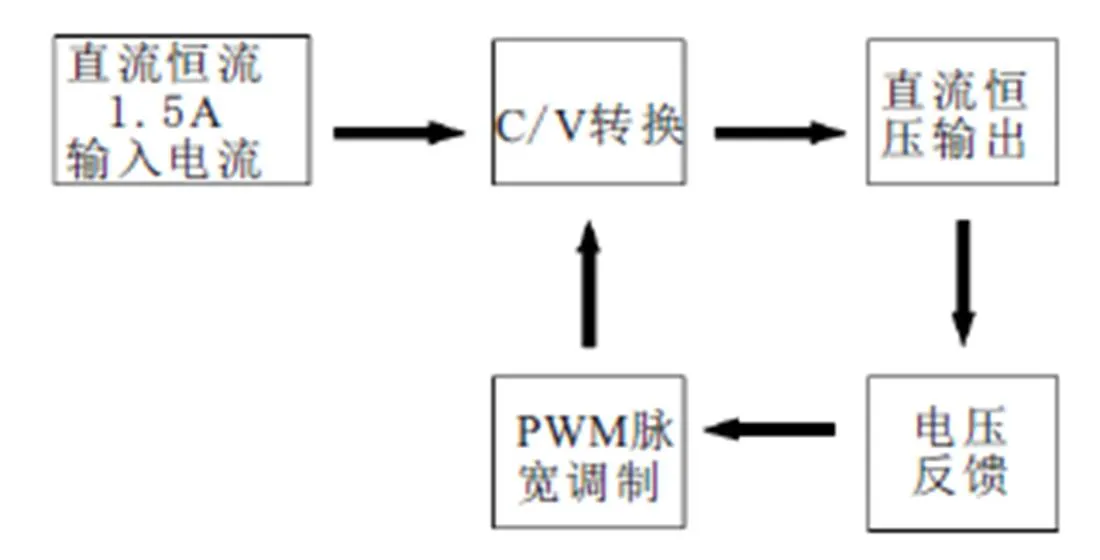
图1 电路总体设计
输出电压经采样后送至PWM控制器,PWM控制器输出两路互补的PWM控制信号,通过控制主电路MOS管的导通与关断来调节输出电压,形成了闭环控制。
2 主电路设计与分析
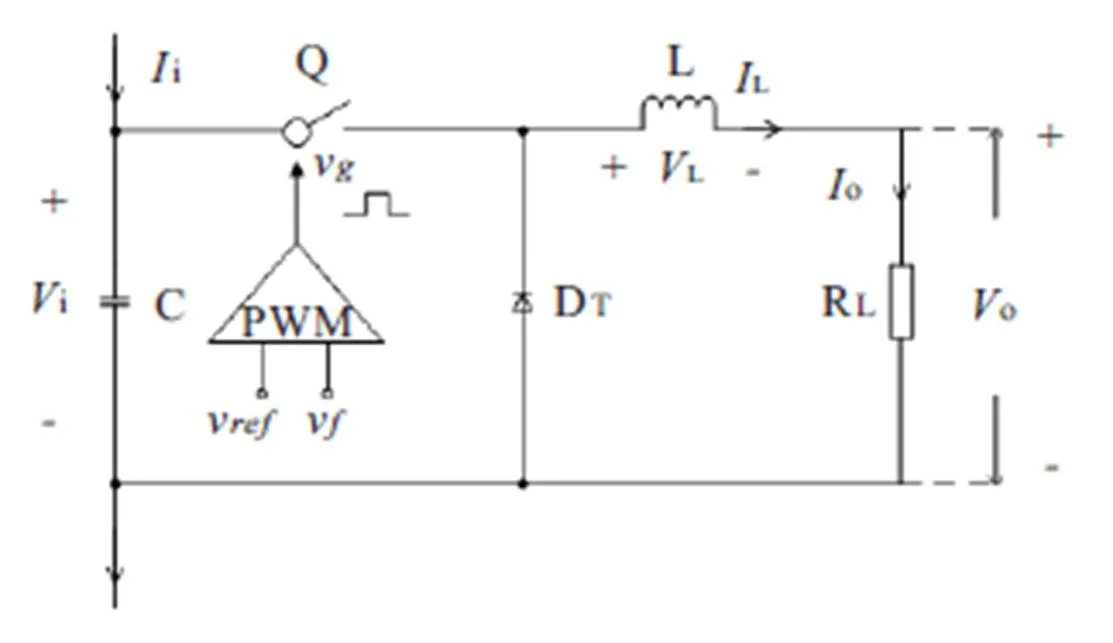
图2 主电路示意图
图2中C是输入端接入电容,具有储能作用和能量转换功能;L是储能和转换电感,同时具有滤波作用;D是续流二极管,同时具有隔离作用;RL是负载等效电阻;Q是由PWM脉冲信号控制的电子开关;i是输入电流,o是输出电流,o是输出电压,g是开关管控制脉冲。
反馈控制电路不输出脉冲时,功率开关管Q截止,恒流源将电流全部用于给储能电容C充电,经过截止时间off后,反馈控制电路输出正脉冲,功率开关管导通,因二极管D存在,此时恒流源电流与储能电容C释放的电流一同流经电感,为负载电阻RL供电,而电感L中的电流逐渐上升,L两端的电压约为i−o,L将电能转化为磁能储存起来,经过导通时间on后,功率开关管Q截止,恒流源再次为储能电容充电。因L中电流不能突变,这时L两端产生右端正左端负的自感电势抗拒电流下降,二极管D会正向偏置导通,L、RL和D构成回路,回路电流值逐渐下降,L中储存的磁能转化为电能释放出来供给负载RL,经过截止时间off后,重复上述过程,最终达到电路稳定工作。
图中除开关为模型外,其余都是普通元器件。开关可用双极型晶体管、场效应管以及IGBT等电子开关实现,控制脉冲可用各种PWM集成电路来实现。
电路到达稳定工作状态时:
从电感分析如下:
功率开关管Q导通时,电感L两端的电压约为i−o,将电能转化为磁能储存起来,电流增加量为:

Q截止时,电感L向负载供能,磁能转化为电能,电流减少量为:


其中为控制脉冲周期。
只考虑理想状态,除负载外,电路无能量损耗,则输入功率等于输出功率,即:


其中为控制脉冲占空比。
从电容分析如下:
功率开关管Q导通时,电容C放电,电容两端电压减少量为:

功率开关管Q截止时,电容C放电,电容两端电压增加量为:

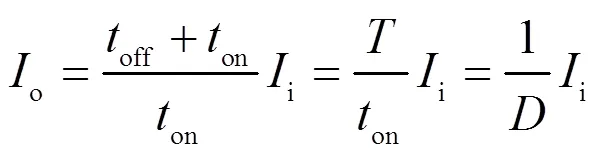
调节控制脉冲占空比,可以调节输出电流o,因为占空比满足0≤≤1,所以o≥i。
通过理论分析,可知该电路在理论上能够实现输出电流大于输入电流的功能,对输出电压取样并反馈到控制电路,通过调节控制脉冲占空比就能够得到稳定的输出电压。

图3 主电路波形
图3为该电路关键节点电流或电压随时间变化的波形图,其中i是输入电流,g是开关管控制脉冲,Q是流过开关管的电流,i是电容C两端的电压,L是流过电感L的电流,o是输出电压。
3 控制电路
3.1 反馈及控制电路原理
为实现电流/电压转换,在输出端取样电压值反馈至PWM的误差电压输入端,通过调整控制脉冲占空比间接调整输出电压使之稳定在某一值,取样输出电压可以采用使用采样电阻或使用霍尔电压传感器等方法。
图4中ref是基准电压,通常在PWM集成芯片内部产生;使用采样电阻采样输出电压,R1、R2是采样分压电阻,通过采样R2的电压f与基准电压ref进行比较进而来改变PWM输出占空比,从而使输出电压为恒定值。
主电路与反馈控制电路之间通过匝数比为1:1的变压器实现电气隔离,PWM信号输出到变压器的初级线圈,在次级线圈上产生相同幅度和相位的信号来控制主电路电子开关的导通与关断。
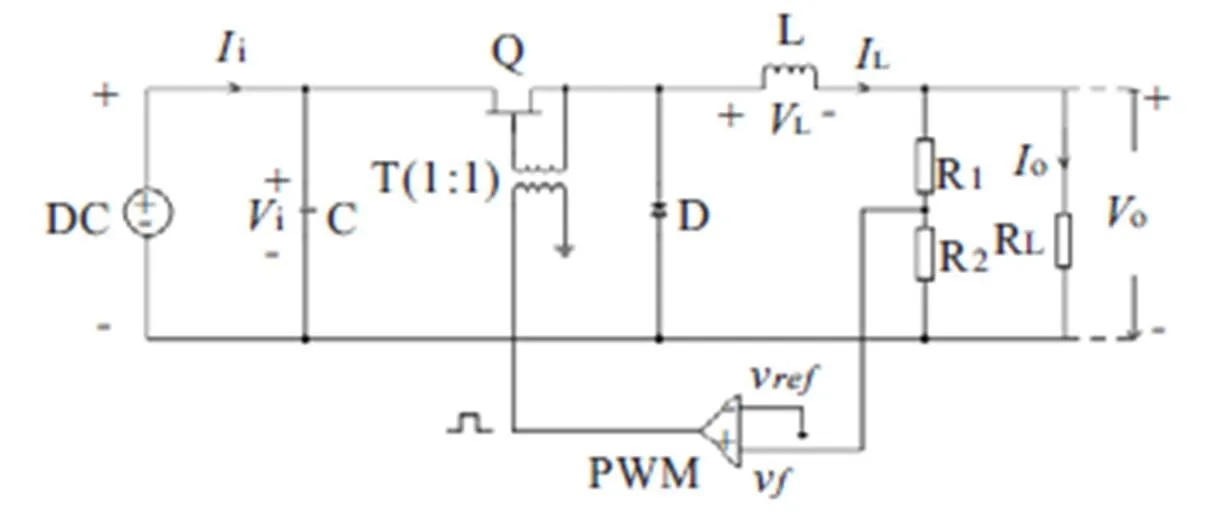
图4 反馈及控制原理示意图


3.2 控制电路设计
控制电路的核心器件为PWM控制芯片,这里采用了SG3525。采样电压接入误差放大器的同相输入端;16脚输出的5.1 V基准电压经电阻R1和R2分压后作为比较电压接入误差放大器的反相输入端。脚5外接电容CT,脚6外接电阻RT,脚5和脚7之间接电阻RD,一般通过改变T和T的值来调节芯片PWM波形的输出频率,其频率的计算公式为:

T的取值范围为1 nF-0.1 μF,T的取值范围为2 kΩ~150 kΩ。芯片的震荡频率为100 Hz-500 kHz。
4 仿真分析
4.1 主电路仿真分析
主电路使用SABER进行仿真,控制电路用可以输出理想的脉冲信号的PWM脉冲源代替,通过调节其周期与高电平时间来调节占空比。电子开关使用增强型MOS场效应管,脉冲周期为50 μs,输出12 V脉冲电压以驱动MOS场效应管。电流源提供1.5 A直流电流,负载等效电阻为5 Ω,仿真时长5 s。

图5 主电路仿真电路

图6 主电路仿真波形图
仿真波形图如图6所示,波形1和4分别是占空比为15.625%时负载等效电阻R上的仿真电压和仿真电流,波形2和5分别是占空比为31.25%时负载等效电阻R上的仿真电压和仿真电流,波形3和6分别是占空比为62.5%时负载等效电阻R上的仿真电压和仿真电流。

表1 主电路仿真数据
由图6和表1可知,在软件环境下对主电路进行仿真,得到了较为理想的仿真结果,仿真电压和仿真电流较为接近理论值,且电路能够在较短时间内达到稳定状态,获得稳定的电压输出。
4.2 带控制电路的仿真分析
使用PSpice对带控制电路的完整电路进行仿真,图7中L为负载等效电阻,阻值为5 Ω,电阻1、2为电压采样电阻,仿真软件中芯片的震荡频率可以直接设置,这里的设定值为20 kHz。
在采样电阻1、2阻值固定的情况下,通过改变分压电阻3、4的阻值来调节输出电压,即负载等效电阻L两端的电压。输出电压o与分压电阻3、4阻值的关系为:

电阻1和2的取值应尽量大以减少电能在取样电阻上的损耗。
图7 带控制电路的仿真电路
仿真波形图如图8所示,波形1和4分别是设定输出为48 V时负载等效电阻L上的仿真电压和仿真电流,波形2和5分别是设定输出为24 V时负载等效电阻L上的仿真电压和仿真电流,波形3和6分别是设定输出为12 V时负载等效电阻L上的仿真电压和仿真电流。
由图8和表2可知,该电路能够实现升流以及C/V转换,并能够较快的达到稳定的工作状态,得到特定的输出电压。当输出电压发生变化时,该电路能够通过反馈电路迅速调整控制脉冲的占空比,从而得到较为稳定的输出电压。

图8 带控制电路的仿真波形图

表2 带控制电路的仿真数据
5 结论
本文提出了一种新的C/V转换电路来为水下基础信息网络平台上的用电设备提供恒压供电,能够实现输出电流大于输入电流,提高了输出功率,增强了平台的扩展性和实用性。通过理论分析和仿真验证,得到以下结论:
1)利用电容充放电的功能,将其放置在工作电路的前端,和恒流源一起为工作电路提供电流,从而达到输出电流大于输入电流的目的。通过调节电子开关的导通时间与关断时间的比值来调节输出电流的值,在满足公式(4)的条件下满足负载的电压和电流要求。
2)通过设计合理的控制电路,该电路可以实现C/V转换,得到较为稳定的输出电压,并且具备自我调节能力,如果输出电压发生变化,该电路能够通过反馈调节使输出电压恢复至设定值。
[1] 上海海洋科技研究中心, 海洋地质国家重点实验室. 海底观测——科技与技术的结合[M]. 上海: 同济大学出版社, 2011.
[2] 汪品先. 从海洋内部研究海洋[J]. 地球科学进展, 2013, 28(5): 517-520.
[3] Paolo FAVALI, Laura BERANZOLI. Seafloor observatory science: A review[J]. Annals of Geophysics, 2006, 49: 515-567.
[4] Bruce M. HOWE, YI Chao, Sumit ROY, et al. A smart sensor web for ocean observation:Fixed and mobile platforms, integrated acoustics, satellites and predictive modeling[J]. IEEE Journal Selected Topics in Earth Observations and Remote Sensing, 2010, (3): 507-521.
[5] 卢汉良, 李德骏, 杨灿军等. 基于水下接驳盒的深海海底观测网络设计[J]. 计算机工程, 2011, 37(18): 19-21.
[6] 吕枫, 周怀阳, 岳继光等.东海缆系海底观测试验网电力系统设计与分析[J]. 仪器仪表学报, 2014, 35(4): 730-737.
[7] 王希晨, 周学军. 海底观测平台应用技术研究[J]. 光通信技术, 2013, (11): 13-16.
[8] 王希晨, 周学军, 周媛媛等. 适用于海底观测网络的恒流远供系统可靠性分析方法[J]. 国防科技大学学报, 2015, 37(5): 186-191.
[9] 卢汉良, 李德骏, 杨灿军等. 深海海底观测网络远程电力监控系统研究[J]. 传感技术学报, 2011, 24(4): 564-570.
Design and Simulation of An Up-current Current/Voltage Conversion Circuit
Wang Yankai, Zhou Xuejun, Zhang Zheng
(Electronic Engineering College, Naval University of Engineering, Wuhan 430033, China)
TN702
A
1003-4862(2019)02-060-05
2018-09-03
王彦凯(1993-),男,硕士研究生。研究方向:水下基础信息网络。E-mail: hjgcwyk@163.com
