基于PLC的移动机械位置检测系统
2019-03-06秦凯焌
秦凯焌,李 徽
(湖南理工学院 机械工程学院,岳阳414006)
PLC 从硬件组成上可归类为一种控制器,其硬件组成一般和通用的计算机并无区别,存储器、中央处理器等部件都属于PLC 的硬件组成范畴,由于PLC通常处于一种恶劣的工业环境、比如地下、矿井,粉尘污染严重的车间上产线、潮湿的空间等等,因此其硬件构成往往要求严格。PLC 的工作继承了传统的继电器-接触器很多思路,同时增加了众多的存储器用来配合CPU 工作,因此功能得到大大增强。 而且通过模拟输入输出或者数字量输出,用来控制工业上的各种各样的自动化生产过程,是自动控制中最关键部分。
1 基于可编程控制器的移动机械位置检测系统
以PLC 为核心构建的机械位置检测系统在控制上属于远程控制系统,关键的技术类型是感应式的无线通信技术,这是一种在类型上介于无线通信和有线通信之间的比较新颖的通信方式。 具体做法是通过在移动装置上安装感应天线,并且和轨道的编码电缆相互感应,从而实现通信。 在这一过程中将天线在编码电缆的长度方向上的位置感应出来,尤其适用于机械的精确定位,并且还可以实现无人操作或者是移动机械自动化操作。 采用这种新型的通信技术对于无线通信易受外界干扰信号影响通信质量、 有线通信方式拖带电缆易磨损的缺点比较容易克服,具有比较强的可靠性,本控制系统主要由地面中控室和机上部分组成, 如图1所示。

图1 定位控制系统构成Fig.1 Composition of positioning control system
1.1 机上部分
对于机上部分而言, 作为系统的控制中枢,同时为了提高系统的兼容性能,主控器部分采用了西门子的S7-200 系列,由机上局和车上控制器组成机上部分,机械工作状态以及装置的运行信息则由控制器来负责, 向机械装置发出各种各样的动作指令,机上局则通过编码扁平电缆和天线箱和中控室进行数据传输和通信联络。
1.2 地面中控室的介绍
地面中控室以控制中心为关键设备,辅以计划记录装置、动画工控机,控制中心在这里的地位就相当于整个系统的中控机,由西门子的S7-300 系列可编程控制器、通信设备和地面位置检测设备组成。
1.3 系统通信媒介
通信媒介由两个收发端组成,分别是终端装置箱和始端装置箱,此外,天线设计成专门的待屏蔽作用的箱体,连接这些装置的是编码电缆。 另外,接收天线和发送天线在安装的时候采用了隔离措施,使得它们的位置检测互不干扰,可以保证检测的稳定性,并且在结构上采用全密封结构,对于恶劣的现场环境能够有效的克服[1]。
2 机械位置检测系统构成
以PLC 为控制核心的位置检测系统由三个部分有机结合成一体,其中最主要的是感应无线通信技术,另外,为了对干扰信号进行屏蔽,采用了差分接收技术。 这个系统采用的工控机来自于研华工控机, 这种类型的工控机可以长时间的连续工作,机箱的结构是钢架结构,可以有效地防止外界的冲击,并且可以防尘、防磁。 系统的电源经过抗干扰设计,在安装的时候非常方便[2]。
2.1 数据通信链路
整个数据通信链路的硬件结构如图2 所示,上面的箭头指令的信号流动方向,下面的箭头是机械信号的流动方向。 天线和编码电缆通过感应的方式进行双向传输,有效传输距离范围是5~25 mm[3]。

图2 感应无线系统通信链路框图Fig.2 Communication link block diagram of induction wireless system
计划指令是由计划记录集通过RS-232 接口向实时控制中心传送,然后再经过中央处理器重新编码以后形成一系列压缩的指令,再通过通信模块将各个地上局进行传送,经过信号调制以及信号放大之后由扁平电缆发送出去。
编码电缆和移动装置上面的接收天线距离非常短,一般不会超过20 mm,可以在这么短的距离之内通过感应的方式,将调制信号接收过来,紧接着这些信号因为比较微弱,还需要通过放大器进行信号放大,然后经过几条线解调以后,信号被还原成为编码,在PLC 的内部,将这些编码通过程序进行解释以后,形成具体的执行命令,这些命令被传送到执行机构规定的动作在液晶显示屏上将整个过程的执行状态显示出来。
同样的道理,各个移动的机械械的位置信息可以按照下面的箭头方向,最终向计划记录及传送并最终形成定位记录,与此同时信息也会传送给实施动画机来对定位的动态进行显示。
2.2 差分接收技术
在这一套控制系统当中,由于各种各样外界的杂散干扰信号存在,必须采用双天线接收技术来克服这些干扰,将那些信号利用差分相减的原理消除掉。 两个天线之间的距离很近,并且编码电缆的距离也非常近,一旦两个天线和编码发出来的信号距离比较近的时候,感应信号就会出现幅度上的波动,距离越近则感应幅度越大相反感应的幅度就会比较弱,通过差分电路进行削弱之后还不能完全将这些差异抵消,通过放大之后,它们才能成为可以用的信号。 而对于那些距离比较远的干扰信号,由于到达两个天线有近似相等的距离,因此通过查分电路之后信号削弱,这样可以保证有用信号从干扰信号当中过滤出来,对于通信的稳定可靠性非常有利。
3 位置检测系统的设计
编码扁平电缆沿着轨道等安装好,将移动机械的信号向地面控制室进行实时传送,编码电缆传送机控制器以及布置在地面的网络中心对外发送信号,而且这些信号送达到动画中控室的位置感应装置,从而将各个移动机械的动态位置精确地检测到。
3.1 上位机软件
在上位机管理软件当中,串行通信模块和主模块采用的编程工具是c++, 界面良好和当前的word界面非常相似,因此人机交互性能非常好,另外由于c++的编程和系统的硬件非常接近, 因此它的一致性非常高,工作稳定高效。 在进行代码编写的时候,要尽量避免使用控件,这样对于系统可维护性是非常有利的。
可以将网络接口划分为统计模块、记录模块和计划模块三个模块,它们的主要作用就是提供动态工作的一系列数据,以便于用户对工作状况和情况进行实时的查询和管理。
通过DreamWerver3.0 软件对主页面进行编辑任何一个功能模块都设置有相应的网页页面,其主要的功能可以描述如下:
计划部分这一部分主要的作用就是建立相关的记录对象,可以关闭数据链接查询各种各样的记录数据。
记录部分一旦完成相应的移动机械指令相应的记录就会立即生成。
统计部分对装置的定位状态 执行结果进行统计。
3.2 PLC 和通信之间的实现
PLC 是整个控制装置的核心大脑部分, 其性质属于动态实时控制[4]。由于PLC 的品牌种类繁多,不同的厂家往往采用适合自己的编程语言,西门子S7系列在工业上占据着垄断地位,西门子公司为其旗下的S7 系列PLC 提供了丰富的编程语言, 比如比较长用的有梯形图和语句表另外一些工程师还比较习惯采用顺序控制图或者是状态图来进行PLC程序的编制, 不同的用户有着不同的编程习惯,可以灵活加以选用同的语言,还可以采用混编的方式编制程序,整个开发过程具有很强的灵活性,采用这些语言编制的梯形图一般来说通用性和一致性都非常高,便于工程师之间相互交流,也便于后续系统的维护。
软件采用灵活性非常强的模块化结构来设计,有几个模块是必须具备的,分别是调度模块和通信模块,另外控制模块负责对其它的模块进行统一协调以及传输控制信息,通信模块一般来说是信息的处理中枢,上载信息、传送动画信息报文是其主要的任务,另外还负责生产计划指令的下载[5]。 通信主要的功能就是对各种各样主模块分解的指令信息向每一个移动机械下载,并且把各种机械位置的动作指令和状态信息及时的收集回来,同时将机械的精密位置向上反馈。 流程如图3 所示。

图3 主模块流程Fig.3 Main module flow chart
车上的PLC 通信其主要的功能就是建立和地面通信以及作业机械之间的数据链路,从而对机械的工作状态和动作控制信息进行有效的反馈,实现精确的位置定位功能[5]。 主要包括由自动寻径模块和主控模块构成,这两个模块在逻辑上被主模块调用[6]。 工作流程如图4 所示。
4 结语
整个系统经过精心的设计以及实践检验之后,工作状态很稳定,整个系统完全是自动定位的,而且能够对移动机械在工作当中出现的状态和问题及时的进行反馈,安全可靠、效率高、容易维护,成本投入低,可以节约大量的人力资源和物力的投入。
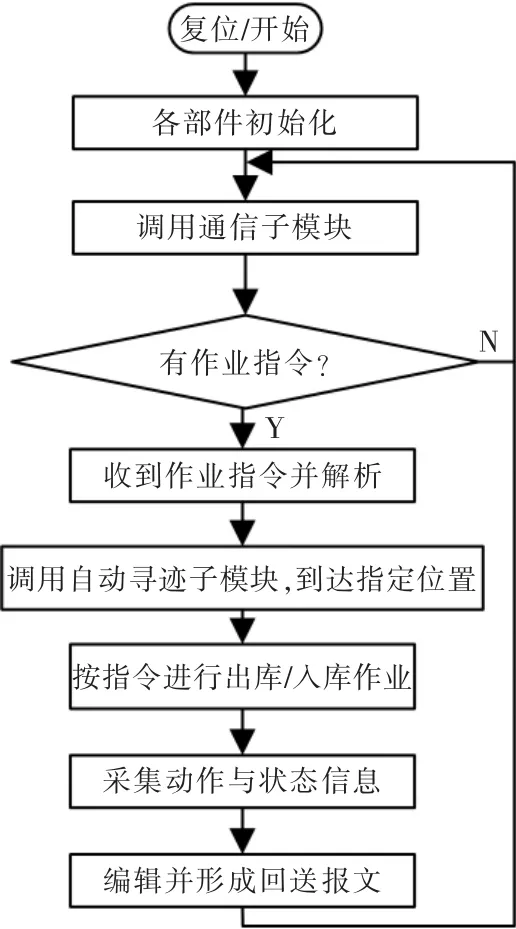
图4 车上PLC 主控模块流程Fig.4 Flow chart of PLC main control module on vehicle
