农业装备升降装置非接触式光纤位移传感器设计与试验
2019-03-06卢建中孟凡勇鹿利单祝连庆
闫 光 卢建中 孟凡勇 鹿利单 祝连庆
(1.北京信息科技大学仪器科学与光电工程学院, 北京 100192;2.北京信息科技大学光纤传感与系统北京实验室, 北京 100016)
0 引言
大型拖拉机、高效联合收获机等高端农业装备及关键核心零部件的信息采集、精准作业、智能决策是推进形成面向农业生产信息化的重要内容,被列为中国制造2025十大重点突破领域之一[1-3]。位移是较为容易测得的物理量,通过相关知识的转化,可以得到诸如应变、温度、加速度、应力等所需工程数据[4-5],且位移与其他物理量相比,更容易获得较高精度数据,因此位移量的监测是工程测量技术中最基本的测量参数。
传统的电测位移方法在实际工程中不具有抗电磁干扰能力、难以组网复用,所以光纤传感器应运而生[6-7]。光纤具有灵敏度高、体积小、质量轻和不受外界环境电磁辐射干扰等优点,在工程应用中可以有很大的自由空间[8]。
光纤位移传感器测量简单便捷,国内外科研工作者对其做了大量研究。ZOU等[9]提出了由光纤光栅、双芯光纤和弹簧组成的用于位移测量的级联弹簧系统,测量范围达到10 mm;贾旻等[10]利用待测位移量可由反射光强变化得出的原理设计了基于反射式塑料光纤位移传感器,在0~3 mm位移范围内测量输出与实际位移呈线性关系,灵敏度为2.13 mV/μm;张燕君等[11]设计了一种基于悬臂梁结构的可调量程拉绳式光纤光栅位移传感器,传感器量程达到60 mm,灵敏度为47.7 pm/mm;ZHU等[12]使用两个FBG位移传感器,结合磁场搭建的非接触位移系统,实现了全范围、非接触、排除温度影响的位移测量;BABAEV等[13]基于磁光效应非接触光纤位移传感器的算法研究,在50 mm测量范围内,非线性度不超过0.01%。
虽然近年来位移传感器发展十分迅速,但在农业设备信息监测中[14],上述位移传感器的量程范围仅限于纳米、微米、毫米、厘米级,这些特性限制了光纤在宽量程测量中的应用,而宽量程高灵敏度位移测量在实际工程领域中十分重要。本文提出基于Peanut-shape的迈克尔逊干涉结构的光纤位移传感器,将高精度、高灵敏度的全纤式迈克尔逊干涉结构与磁场相结合,由磁尺长度实现宽量程的测量。
1 传感测量原理与永磁阵列强度分析
光纤全纤式Peanut-shape迈克尔逊干涉结构如图1所示。

图1 Peanut-shape干涉结构示意图Fig.1 Diagram of Peanut-shape interference structure1.入射光 2.纤芯光 3.包层光 4.反射光
光纤输入光信号在经过Peanut-shape结构处时被分为两路光路,分别沿着纤芯和光纤的高阶包层膜进行传输,两路光传输一段距离后到达光纤最终端面并从最终端面反射回来(最终端面相当于一面反射镜)。当在高阶包层膜中反射回来的光再次经过Peanut-shape结构时,会与纤芯中的光重新耦合在一起。由于纤芯和包层的相位不同,因此会发生两束光的干涉,即迈克尔逊干涉。所形成的迈克尔逊干涉可以用来测量许多环境参数[15]。纤芯与包层两路光的相位差Δφ可以表示为
(1)
其中
式中 Δnneff——纤芯与包层有效折射率差
L——Peanut-shape结构与反射端面的干涉距离,m
N——干涉峰波谷或波峰阶数
λ——入射波长,m
干涉谱的光强可以表示为
(2)
式中I——干涉谱光强,W
I1——纤芯光光强,W
I2——包层光光强,W
当相位差Δφ=(2N+1)π时,可以得到第N阶干涉峰波谷的中心波长
(3)
2个干涉峰之间的距离(FSR)为
(4)
当作用在光纤迈克尔逊干涉结构上的应变或温度发生变化时,纤芯与包层的有效折射率及干涉距离L都会产生变化,从而引起干涉条纹的变化,由式(3)、(4)可得
(5)


ε——作用在光纤的应变,m/℃
KT——温度系数,nm/℃
ΔT——温度变化量,℃
Kε——应变系数,nm
Δε——应变变化量
根据上述分析可知,基于光纤全纤式Peanut-shape迈克尔逊结构可以用来对外界参数进行测量。
利用麦克斯韦方程组和边界条件,对磁场建立有限元分析模型,如图2所示。
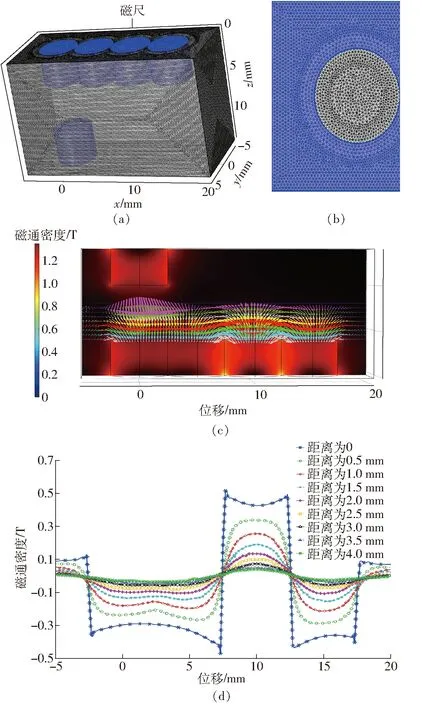
图2 有限元分析Fig.2 Finite element analyses
对磁尺阵列表面的磁场及传感探头和迈克尔逊干涉的感应灵敏度及输出信号进行分析。仿真模型是由等效于线性滑动的4个永磁体阵列组成的。磁尺阵列上方为传感器探测器所在位置。通过对探测器进行移动,会使其施加的磁场和作用于Peanut-shape迈克尔逊干涉结构的应变发生变化,从而达到对位移的探测与信号处理。
进行有限元分析时对永磁体磁场进行静态磁场计算与仿真。仿真计算时,空气层厚度为6 mm,磁标距为10 mm,进行仿真的4个永磁体阵列使用的是NNSN排序,前2个永磁体呈NN排序,后2个永磁体呈SN排序,同一张图得到两种排序的磁场曲线仿真结果。后面试验中则使用的均为NS交替排序方法。空气层的磁场强度较为显著,为了得到更可靠的结果,需要对其更为精细分割,如图2a、2b所示。
图2c为与磁尺的距离从0到4 mm的磁尺表面磁感应强度密度分布,每0.5 mm为一个步进。该图中的曲线由箭头方向不同的磁感应强度构成,横坐标表示磁尺阵列的一段,纵坐标表示为磁感应强度。如图2d所示,距离磁尺的距离越近,磁感应强度分布的变形就越严重,类似于锯齿波;而与磁尺的距离越大,N/S排序连续磁场强度曲线越好,越接近正弦。磁力的正弦曲线计算公式可以表示为[16]
(6)
式中B——磁力振幅,N
τ——磁尺阵列N/S一个周期内的间距,m
x——传感探测器与磁尺阵列相对移动距离,m
位移传感器量程由磁尺阵列长度决定,磁尺阵列可根据需求无限增加,因此认为量程可无限增大。由图2d可知,在传感探测器与磁尺之间的距离为1~3 mm时,能够确定理想的正弦波形。通过理论分析,可以找到最佳的磁间距来获得更好的分辨率。
由于光纤属于各向同性的圆柱结构,所以光纤所受到的应力可以分为3部分,沿着光纤方向的轴向应力在光纤波长变化中发挥着重要作用。
在弹性范围内,给光纤施加轴向力,光纤受到的横向压缩或拉伸,可以使用胡克定律表示
(7)
式中σ——应力张量
c——弹性模量
A——横截面积
实验室环境,在不考虑温度影响的情况下,联立式(5)~(7),可以得到光纤中心波长变化与位移引起的应变之间的关系
(8)
其中
D=BKε/(Ac)
式中D——灵敏度,pm
D可以通过改变B来调整,当磁场增加或探测器与磁尺间的间隙变小时,灵敏度增高。
2 传感器结构制作与封装
利用光纤全纤式Peanut-shape迈克尔逊干涉结构及磁力效应进行了传感器设计,光纤本身的Peanut-shape结构使光路产生迈克尔逊干涉结构,产生干涉光谱,传感探头为永磁体,负责将磁力信号转换为位移参数的信号。磁力强度的变化会使得Peanut-shape迈克尔逊结构的干涉谱发生变化。
使用CO2激光熔接工作站(Fujikura,LZM100型)对光纤进行Peanut-shape结构制作。图3为试验过程中利用光纤熔接机制作出的光纤Peanut-shape结构显微图。
具体制作过程如下:首先将一端切平的光纤放入光纤熔接机中,对光纤端面进行熔融。系统具体参数设置如下:光纤球过渡直径设置为180 μm,可调整偏差为5 μm,光纤直径125 μm,预热10 s。由于放电能量较大,会使光纤切平端面熔为一个球形。待两根光纤球形端面制作完成后,对光纤进行熔接,形成Peanut-shape结构,构成迈克尔逊干涉。
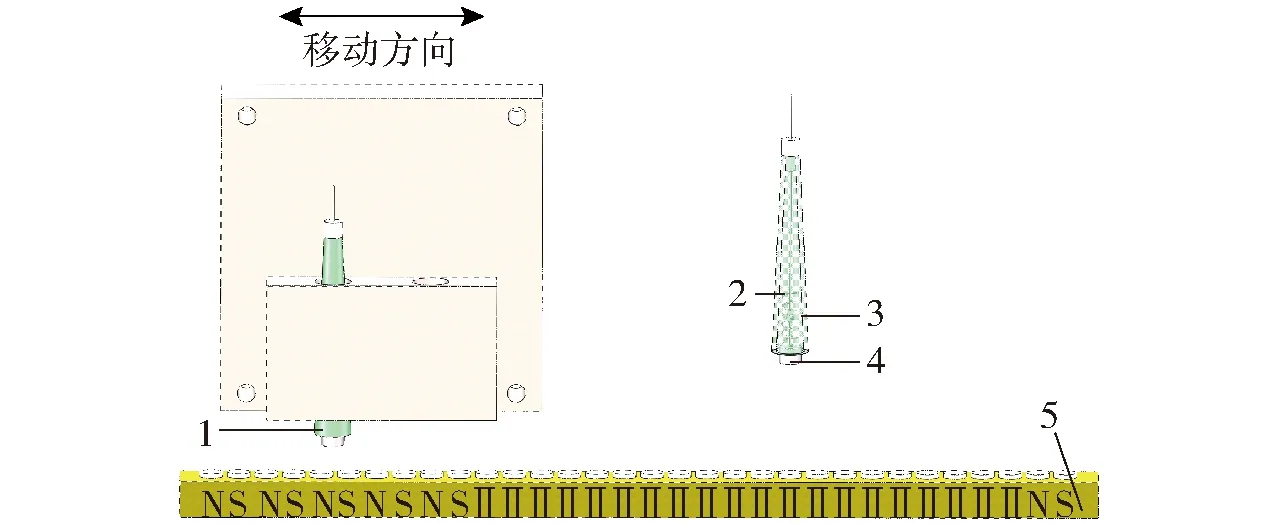
图4 传感器及位移平台示意图Fig.4 Schematic of sensor and displacement platform1.传感器 2.弹簧 3.Peanut-shape结构 4.永磁体 5.磁尺
封装时,将弹簧套在制作的光纤Peanut-shape结构处,弹簧长度约14 mm,使用环氧树脂胶(DP420)将弹簧与光纤一端胶粘在永磁体表面,并置于锥形橡胶管中,在锥形橡胶管尾部套入光纤保护套管,使用环氧树脂胶(DP420)进行胶装。封装完成的传感器及位移平台系统示意图如图4所示。
3 试验与结果分析
3.1 应变标定试验
取制作好的Peanut-shape光纤,进行应变标定试验。将光纤粘贴于拉伸试验件,并将拉伸件夹在MTS拉伸试验机上,对其施加应变0~1 600 με,光谱仪采集的光谱如图5所示。
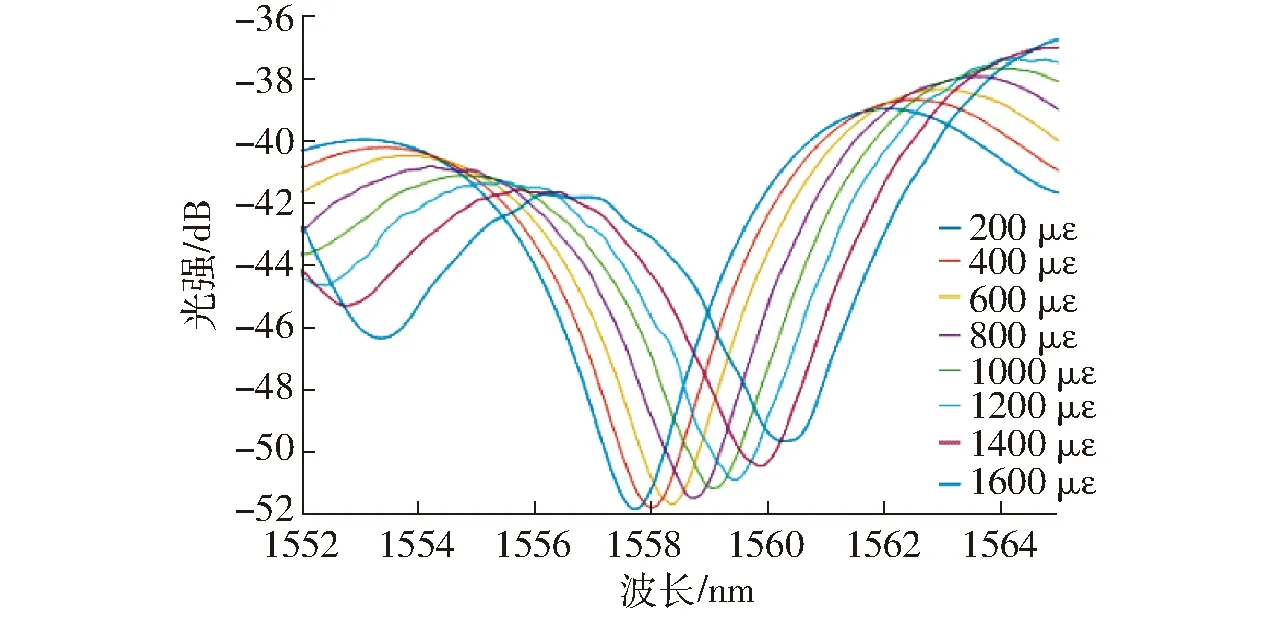
图5 不同应变下的光谱Fig.5 Spectrum of different strains
使用Matlab进行波谷寻峰,得到应变与中心波长的标定关系如图6所示。
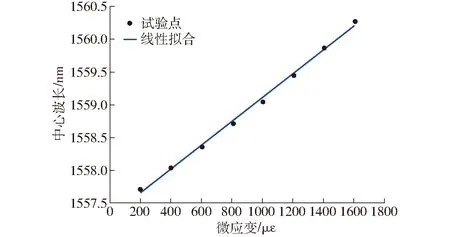
图6 应变标定Fig.6 Strain calibration
3.2 位移试验系统
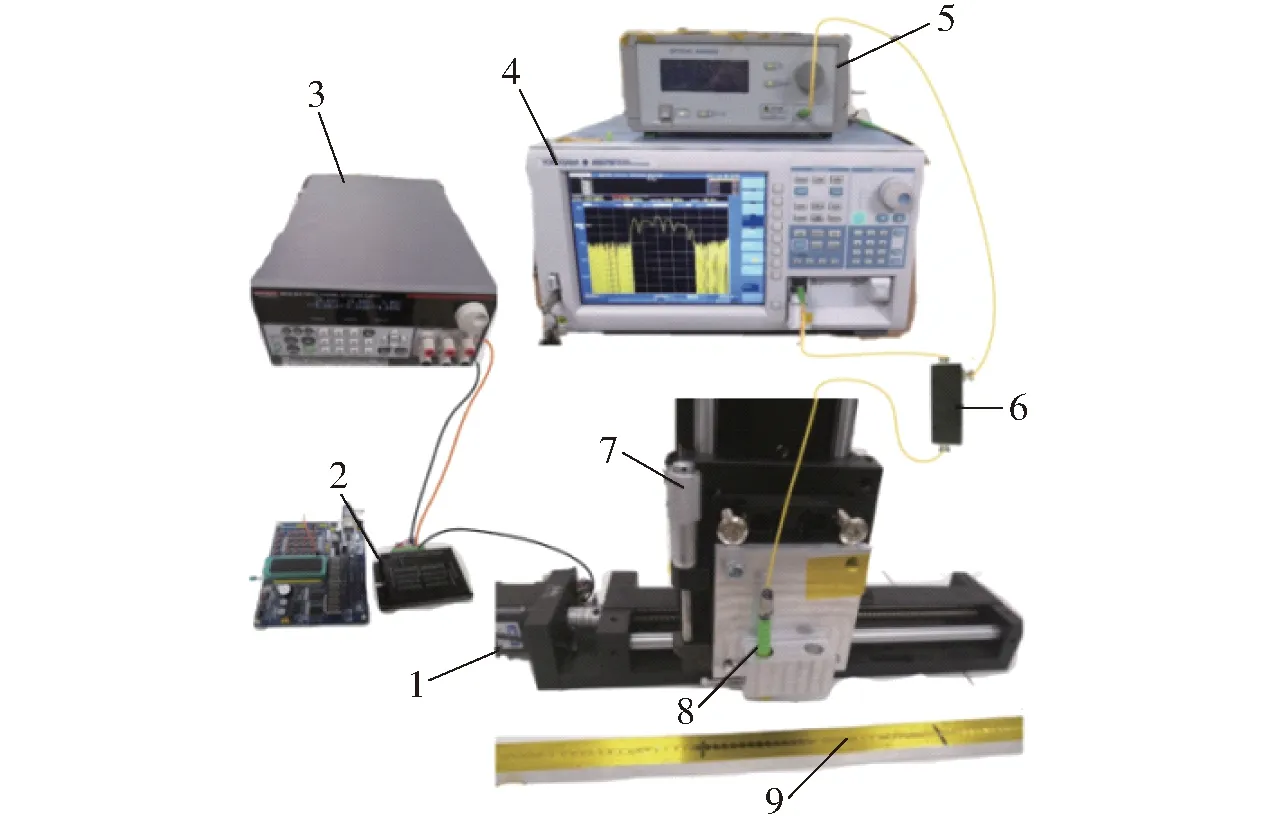
图7 试验系统Fig.7 Field experimental system1.步进电机 2.控制驱动器 3.供电电源 4.光谱仪 5.光源 6.耦合器 7.微位移平台 8.传感器 9.磁尺
取相同规格的光纤进行封装,对封装完成的传感器进行位移测试,评估传感器性能。采用AQ6370D型光谱分析仪、光源、计算机、PSMX25系列微位移平台、步进电机、开关电源等搭建试验系统。整体试验系统如图7所示。
光源发出的光波通过耦合器进入光纤Peanut-shape迈克尔逊结构的光纤传感器中,经反射后将光谱信号传输到光谱仪中,通过光谱仪对返回光谱数据的监测,能够评价传感器性能。传感器的迈克尔逊干涉反射谱如图8所示。
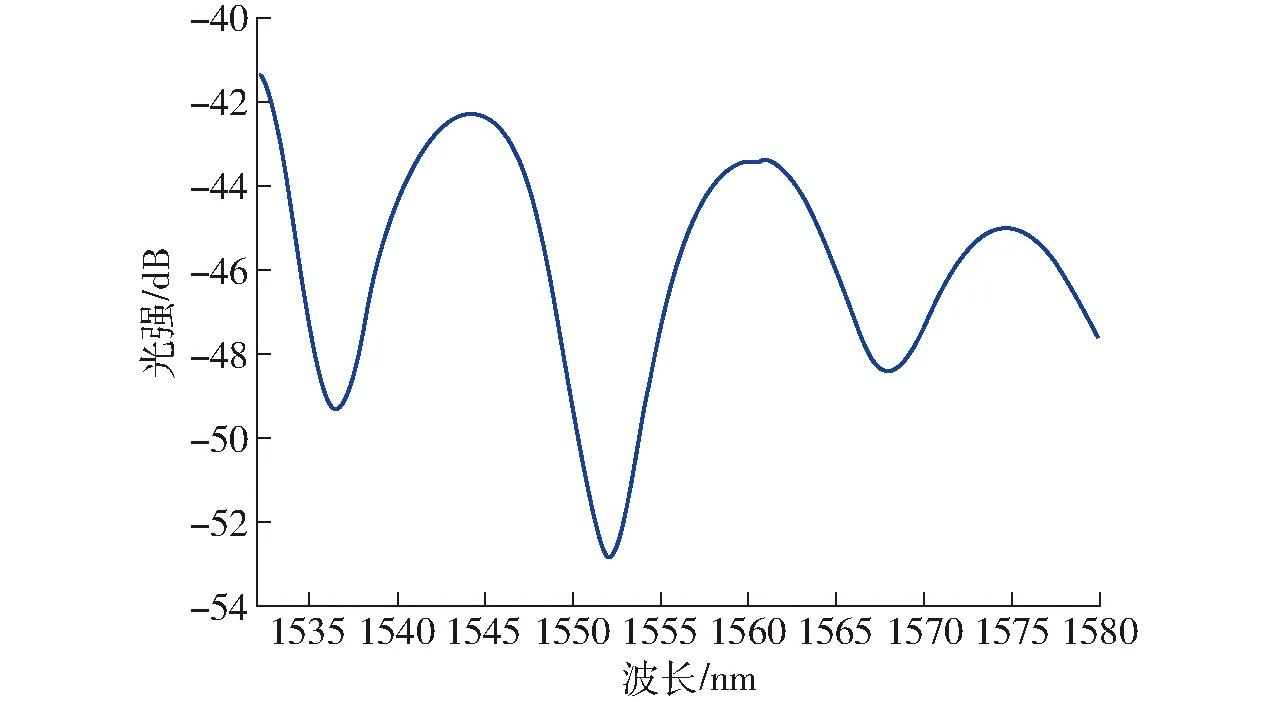
图8 干涉反射谱Fig.8 Interference reflection spectrum
波峰或波谷的中心波长及偏移量可通过光谱分析仪进行监测,步进电机的电压设为恒压20 V,通过调节步进电机控制器(JF24D03M型)的DIP开关来控制电机速度与方向,通过不同的端口开关,可以控制不同的转速模式及运动方向。
3.3 试验结果分析
分析图2d、图5及式(6)~(8)可知,光谱仪物理分辨率固定为0.02 nm,传感探头与磁尺距离越近时,传感器位移相同时所受到的力及应变ε就越大,光谱漂移量越大。缩小传感探头与磁尺间距离,或增加永磁体强度,即可提高测量精度与灵敏度。
分析图6可以得到中心波长y与微应变ε的关系式为
y=0.001 82ε+1 557.294 (R2=0.997)
(9)
分析式(9)可知,Peanut-shape光纤传感器应变灵敏度达到1.82 pm/με,是普通裸光纤的1.5倍,灵敏度得到了较大的提高,线性度为0.997。
当探测器与磁尺之间的距离过小时,位移与磁场之间的关系类似于锯齿波。所设计的传感器灵敏度可调,通过探测器与磁尺间距离的调整,可以改变传感器的灵敏度,距离越近,灵敏度越高。综合比较,探测器与磁尺间的间隙为1.5~2 mm之间时,灵敏度与反射谱波形比较合适。
试验中,传感器的位置由PSMX25系列精密位移平台进行驱动与方向的控制,探测器与磁尺之间的距离为2 mm。使用Matlab对随位移变化的其中一个波谷中心波长进行拟合。图9试验曲线是传感器干涉谱波谷中心波长随位移变化的拟合曲线,呈正弦曲线趋势。图2d为仿真曲线。图9与图2d的后半段NS仿真曲线都呈正弦曲线分布,故两者趋势一致。

图9 位移与中心波长关系拟合曲线Fig.9 Fitting diagram of relation between displacement and central wavelength
拟合曲线的公式可以表示为
(10)
分析图9及式(10)可知,封装完成的光纤Peanut-shape迈克尔逊干涉位移传感器灵敏度高,线性拟合度达0.999,最大波长偏移量为0.982 3 nm,制作的Peanut-shape光纤传感器应变灵敏度为1.82 pm/με,即应变测量可以达到545.7 με。
位移传感器方向辨别,可通过两个传感器形成正弦余弦曲线相互作用,或对磁尺永磁铁的序列排序编码实现[12,17]。
由文献[12]可知,将两个传感器并排在磁尺上方,两传感器探头间隔为(1/4+n)个永磁体距离,1号传感器在位移时得到的数据拟合为正弦波,2号传感器数据拟合为余弦波。当正方向移动时,1号传感器领先于2号传感器90°相位差,反之,2号传感器领先于1号传感器90°相位差,通过观察拟合数据的相位,可以得出传感器的移动方向。
由文献[17]电磁栅位移传感器设计可知,对磁尺上的永磁体进行霍尔编码排序,N、S极输出高低电平,对应不同的三位、四位编码。通过编码与查表的方式及观察光谱的变化,可以判定传感器的运动方向,后续试验会继续验证。
4 应用举例
联合收获机作业时,需要调节割茬高度,割台必须升降方便。割台升降油缸采用液压装置,在使用时,升降的距离十分重要,若出现故障,会造成很大的安全和经济损失,因此需要对升降距离进行实时监测。
以北京-2.5型联合收获机为例,将Peanut-shape迈克尔逊干涉光纤位移传感器应用于割台升降装置中,如图10所示。
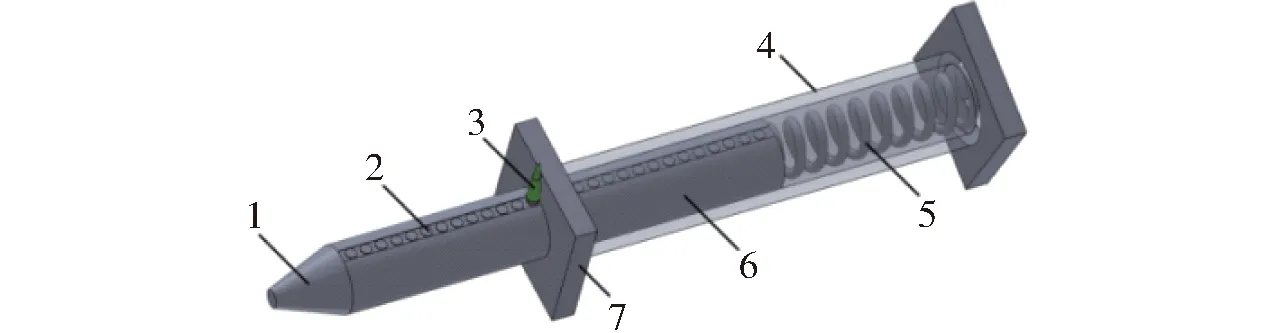
图10 割台升降装置Fig.10 Lifting device of cutting table1.顶杆 2.永磁体 3.传感器 4.缸体 5.弹簧 6.柱塞 7.卡箍
将割台柱塞开一横槽,置入永磁体阵列,形成磁尺装置,传感器固定在卡箍,悬于磁尺上方,构成位移测试系统。当柱塞活动时,可对升降位移参数进行实时监测。
5 结论
(1)提出一种基于光纤全纤式Peanut-shape迈克尔逊干涉结构,设计了一种非接触式光纤位移传感器,该结构与传统位移传感器相比,易于制作,成本低,封装简单,并可结合磁场进行仿真。数值仿真模拟表明,传感器探头和磁尺之间的间隙对传感器灵敏度与输出曲线有一定影响。传感器量程由磁尺阵列长度决定。
(2)对传感器进行测试,建立了应变标定系统与位移测试系统。Peanut-shape迈克尔逊干涉的光纤传感器应变灵敏度达到1.82 pm/με,线性度为0.997;位移光谱曲线与仿真结果一致,线性拟合度为0.999,可测量应变达到545.7 με。
(3)通过减小传感探头与磁尺的间距或提高磁场强度可以提高灵敏度系数,使得传感器具有较高精度与灵敏度。在仿真曲线和试验拟合曲线中都可以观察到很好的中心波长与位移曲线关系。此外,传感器灵敏度和测量范围都可以通过改变设备的尺寸进行调节。