基于机器视觉的物料瞬时流量测量系统设计
2019-03-05尹文庆李旭辉
华 程, 尹文庆, 姜 鑫, 李旭辉, 浦 浩
(南京农业大学 工学院 江苏省农业智能化装备重点实验室,江苏 南京 210031)
0 引 言
传统的过磅计量方式在消耗大量人力物力的同时,也影响了整个粮食物流[1~3]的效率。在粮食储运过程中,带式输送机是主要的运输设备,随着带式输送机向高带速、大运量方向发展[4],开发实时、准确的粮食物料流瞬时流量检测方法,对于提高粮食物流效率及节约运输成本具有重要意义。
光学测量技术以其柔性大、结构简单、低成本和高精度等优点,逐渐应用于工农业物料体积等非接触式测量中。文献[5]利用激光扫描仪动态测量堆体表面的几何信息,并结合姿态测量系统和全球定位系统(global positioning system,GPS)通过数据融合计算形成堆体的三维点云,利用点云获得散货堆体积。文献[6]提出了激光投射仪扫描辅助下的双目摄影测量方法,使双目相机在不同工作检测站均可对堆场进行扫描与局部三维形貌重建。文献[7]设计了基于现场可编程门阵列(field programmable gate array,FPGA)和3G的带式输送机物料流视觉检测系统,通过采集物料流视频图像结合3G网络实现散状物料流量远程在线检测功能。文献[8]通过实时采集煤矿井下带式输送机煤流图像,利用反向传播(back propagation,BP)网络分类判别煤流边界,从而求出煤流大小。上述基于视觉检测方法虽具有可行性,但处理速度因受物料表面纹理特征提取、边界识别、摄像机标定、动态测量等因素限制而无法满足带式输送机物料流量实时采集要求。激光三角法是非接触光学测量的重要形式,该方法结构简单、测量速度快、精度高,适合测量大尺寸和外形复杂的物体[9]。
根据带式输送机物料流瞬时流量测量实时、连续、精准的需求,本文利用工业相机结合线激光发射器搭建机器视觉平台,采集带式输送机高速运行下的粮食物料线激光轮廓图像,利用激光三角法测量原理完成系统标定,结合标定结果获取实际粮食物料表面三维数据,设计基于梯形面元积分的物料瞬时流量测量数学模型,最后利用开发的带式输送机物料瞬时流量测量系统对本文测量方法进行实验测试。
1 系统组成与工作过程
1.1 系统组成
测量系统总体结构如图1,系统选用固定机架输送机为平移运动平台,规格为400 mm×3 000 mm,整机全部由高精度铝合金结构组成,横行梁为国标40 mm×80 mm,皮带采用绿色2.0 mm厚聚氯乙烯(poly vinyl chloride,PVC)防静电皮带,动力采用可变电机,型号为OPG250 W,皮带速度0~48 m/min可调,采用同步轮同步带传动,传动比1︰5。系统设计拍摄视场为200 mm×160 mm,被测对象为稻谷,品种为早籼307,测量目标是获取稻谷物料流的体积流量,为了保证测量系统的精度,视场内稻谷需分辨小于0.5 mm的细节,相机帧率需大于100 fps,根据系统实际安装需求,相机成像物距大于320 mm,因此工业相机选用的是大恒MER—131—210U3M黑白相机(分辨率为1 280像素×1 024像素,帧率为210 fps,图像格式为.bmp)。由光学系统计算公式可计算出满足系统要求的镜头焦距,因此工业相机镜头选用的是Computar系列百万像素定焦镜头,型号为M0814—MP2,焦距为8 mm。系统选用的线激光器为激光半导体一字线激光器,型号为FU650AB100—GD16,激光波长为650 nm。运动控制器选用的是SENLAN变频调速器,型号为BT40D。计算机CPU为Intel Core i7—2720QM,8GB内存,500GB硬盘。

图1 测量系统结构
1.2 工作过程
进行测量工作时,如图1所示,料仓开始平稳放料,堆积在输送带面上输送通过线激光扫描区,输送带的运动方向与线激光器的光束垂直。首先,激光器投射出来的线激光条纹打在被测稻谷表面,随着输送带的传动,线激光器光束不断扫过稻谷,输送速度由运动控制器上传至计算机,同时与线激光器光轴在同一平面的工业相机开始实时采集图像进入计算机处理。整体测量系统流程如图2所示。

图2 测量系统流程
2 谷粒瞬时流量测量算法
2.1 实验参数标定
标定光路如图3所示,线激光投射到三棱柱上,反射后的光线经过光学透镜在互补金属氧化物半导体(complementary metal-oxide semiconductor,CMOS)面阵传感器上成像,根据光路间的三角几何关系[10],即可测得三棱柱表面映射点的三维坐标。其中O为光学透镜的中心,M′,P′分别为最低点M,三棱柱顶点P两点在CMOS成像平面上的像点,θ为入射光线与最低点M反射光线的夹角,α为最低点M反射光线与CMOS成像平面的夹角。

图3 标定光路
(1)
式中h为物体实际高度,B为最低点成像物距,d为物体在CMOS平面成像位置与最低点成像位置的偏移距离,b0为物体成像像距。
(2)
标定过程中,取如图4所示的直角三棱柱,其规格参数为:l=70.36 mm,w=30 mm,h=35.3 mm,c=50 mm。通过对其放置不同的姿态进行拍摄,经数字图像处理后,得出几组h与d的关系式,求得k1=3.58,k2=0.004 46,通过插值法可求得成像点对应物体的实际高度。

图4 标定用三棱柱
2.2 算法处理
为了获取稻谷物料的线激光轮廓的边界点,首先提取感兴趣区域(region of interest,ROI)图像,确定ROI为1 280像素×500像素,并对采集到的图像进行预处理去噪,消除采集过程中环境光的干扰因素,采用5像素×5像素模板的中值滤波算子进行滤波处理[11],中值滤波后的图像如图5(a);利用极值法检测线激光轮廓边界并提取边界,极值法的基本原理是将结构光光条横截面上灰度值最大的点作为结构光边界,如图6所示,该方法首先识别出结构光光条横截面上的局部灰度极大值,点(yc,zc)即为求取的结构光边界坐标;为避免边界点跳跃,同时设定轮廓边界阈值Tz=400,当zc>Tz时,以上一边界点坐标代替此点。该方法算法简单、速度极快,处理结果如图5(b)。

图5 线激光轮廓边界点坐标提取

图6 极值法
通过标定结果将线激光轮廓边界点坐标转换为对应的稻谷物料截面实际物理高度,如图7(a)所示,k为当前t时刻拍摄获取的物料流截面帧数,因相机在y方向(物料截面方向)上分辨率大于1 000,可将相邻两点间连线近似看作线性变化,则在第k帧时,第i个梯形微元面积为
ΔS(i,k)=(zik+zi+1k)Δy/2,
i=1,2,…,m,k=1,2,…
(3)
式中m为每帧物料截面边界特征点数;Δy为y方向像素格之间的距离,由数字图像处理可得。则在t时刻,稻谷物料瞬时截面积为

(4)
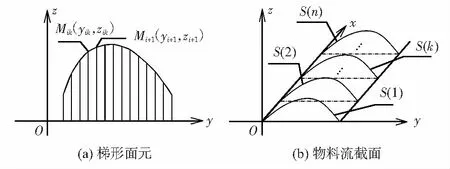
图7 物料流瞬时流量数学模型
设带式输送机以带速v(t)水平向右运输稻谷物料,则S(1),S(2),…,S(n)为第1,2,…,n帧线激光物料流轮廓截面面积,如图7(b)所示。设t时刻,物料流瞬时截面积为S(t),则瞬时体积p(t)为
(5)
式中f为相机帧率;v(t)为输送带带速,由运动控制器测出,则在t时间内,稻谷物料体积为
(6)
式中n为单位时间内物料流截面面积个数。
3 实验与结果分析
为了探究不同物料体积及不同运输速度对整个测量系统的影响,将开发的测量系统搭建于南京农业大学工学院的江苏省农业智能化装备重点实验室内,实验被测物料为产自安徽芜湖的早籼307稻谷,通过基于VS2010开发的物料流激光轮廓数据采集与处理软件实测带式输送机通过物料的体积流量值。本实验分别采集了带式输送机电机运行频率f=5 Hz,f=10 Hz,f=15 Hz,f=20 Hz,f=25 Hz对应带速分别为v1=8.75 cm/s,v2=17.5 cm/s,v3=26.25 cm/s,v4=35 cm/s,v5=43.75 cm/s,料仓谷粒体积为V1=7 681 cm3,V2=13 908 cm3,V3=22 694 cm3下3种不同容积时水稻物料的体积测量值。为了保证测量数据的有效性及准确性,本文对3种不同体积水稻物料,在5种不同带速下重复测量10次,取相对误差绝对值的平均值,结果如表1所示。

表1 带式输送机谷物瞬时体积流量实测值
4 结 论
1)最小误差为1.45 %,出现在输送带速度为8.75 cm/s,测量总流量为7 681 cm3时;最大误差为4.64 %,出现在输送带速度为43.75 cm/s,测量总流量为22 694 cm3时;试验测量值与物理测量值整体误差在5 %以内,说明本系统测量精度高。
2)随着速度的增加,系统测量误差呈上升趋势,且在大带速时,测量系统误差波动更大;随着体积的增加,带速对测量系统误差的影响在减弱。
3)误差分析
拍摄误差:根据重复实验结果的误差分析可知,由于摄像机的帧率不能保持恒定,在某些时刻出现跳帧现象,因此步长发生变化,导致误差波动。
模型误差:由于物料流表面形状是不规则的,所采集到的物料流截面轮廓也在不断变化,而本研究所采用的基于梯形面元积分的物料流瞬时流量计算模型中,假设2帧时间内物料流截面积与前帧面积相同,因此存在误差。而随着输送带速度的增加,步长增大,误差也随之增大。
流量堆积误差:随着物料流量的增加,误差被不断累积,因此误差相对低流量时更大。
改进建议:降低输送带速度;选择更为先进的摄像机;改善物料瞬时流量计算模型。通过这些途径,可以稳定步长、保证帧率,使计算模型更加准确,减小误差的堆积,从而切实、有效提高带式输送机物料瞬时流量测量精度,降低误差。
