基于射频信号强度的室内定位方法*
2019-03-05王肖玥峰鲁照权周永燕徐盛良
王肖玥峰, 鲁照权, 周永燕, 徐盛良
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
0 引 言
传统的自动导引车(automatic guided vehicle,AGV)小车通常采用循迹技术,移动路径是固定的,已无法满足智能制造的要求。为了能方便地任意规划路径,必须寻求新的循迹技术并实现室内导航,而室内定位是实现室内导航的关键技术。
常见的室内定位技术有超声波、红外线、超宽带、射频识别(radio frequency identification,RFID)等技术。超声波定位精度最高,但覆盖范围最小;射频识别技术虽然覆盖范围最大,但精度最低;超宽带的精度较高,覆盖范围较广,但成本最高。由于工厂厂房面积较大,可采用射频信号强度测距进行定位。其中,基于接收信号强度指示(received signal strength indication,RSSI)的定位算法有三边测量法[1]、压缩感知[2]算法等方法。三边测量法通过3只传感器以自身坐标为圆心、测得目标距离为半径画圆,根据其圆的交点判断目标位置,精度较高,但对定位模块要求较高。文献[3~5]运用压缩感知定位算法通过将待测区域划分网格并测量每只传感器接收到的由每个网格的目标发射的信号强度构建测量矩阵(指纹库),通过基追踪(basis pursuit,BP)、匹配追踪(matching pursuit,MP)等算法计算目标位置。该方法可用于判断多个目标的位置,但有目标数量上限,需要构建巨大的测量矩阵,且构建完毕后,一但测量区域发生变化,测量矩阵需要重新构建,精度随待测目标数增多而下降。
为了满足大覆盖范围的要求,本文基于射频信号强度,使用CC1101芯片进行距离测量。将测量结果采用改进的三边测量法分别对每个目标算法进行定位计算。通过试验,得到较为精确的结果。
1 系统模型
假设定位区域长为L(m),宽为T(m)。在定位区域内随机布设M个定位模块,每个定位模块分配一个ID号,且位置坐标已知。设在定位区域内有K个移动目标,每个目标上安装一个目标模块,为了便于识别,每个目标模块分配一个ID号,目标模块根据定位模块发射射频信号的强度。
第m个定位模块(1≤m≤M)和第k个目标模块(1≤k≤K)的欧氏距离为
(1)
式中xm和ym为第m个定位模块的坐标,xk和yk为第k个目标模块的坐标。
射频信号的强度受障碍物遮挡、多径传播等环境因素的影响较大。大量实验统计结果表明,平均信号强度与传输距离之间的函数关系[6~8]为
(2)

由式(2)可得第k个目标模块测量到的定位模块m的信号强度为
pmk=p0-10nplg(dmk/d0)
(3)
式中dmk为目标模块k到定位模块m的距离。
2 定位算法

(4)

图1 三边测量法原理
在计算交点Pi的过程中,由于系统误差、粗大误差等测量误差导致的三边定位模块所构成的圆并不能交于一点。经大量实验发现,CC1101芯片测距测距误差大于实际距离,故定位情况如图2所示。
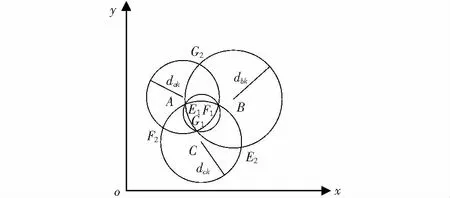
图2 三边测量法误差
通过式(5)分别解得圆B与圆C交点E1(xbc1,ybc1),E2(xbc2,ybc2),圆A与圆C交点F1(xac1,yac1),F2(xac2,yac2),圆A与圆B交点G1(xab1,yab1),G2(xab2,yab2)
三十年前,过年三十的晚上,我生下你的第二个儿子才三天,你为了赶紧娶那位有钱、有门第的小姐,你们逼着我冒着大雪出去。
(5)
通过式(6)分别比较2个圆的2个交点与另一个圆圆心距离,找出距离较小的点,筛选出点E(xe,ye)、点F(xf,yf)、点G(xg,yg)
(6)
通过式(7)将得到的3个点进行平均,得到点Pi(xi,yi),即目标模块的定位坐标
(7)
考虑到实际测量中出现定位模块故障、目标模块与定位模块之间有物体遮挡[9]等情况会造成较大的误差。当有效定位模块数大于3个时,为减小误差,对数据进行进一步处理。
(8)

(9)
将这3个坐标平均得到第k个目标模块最终定位坐标Pk(xk,yk)如下
(10)
3 校验模块
考虑到定位目标由于老化等因素不能得到有效数据,影响定位精度。在定位模块的位置上安装接收信号的校验模块。每个校验模块与定位模块距离l0已知,在每次定位之前定位模块发送信号让校验模块检测强度并得到距离l,当所有校验模块测距与实际距离偏差值在校验精度范围ε以内,定位系统正常执行
(11)
若某个定位模块与各检测模块距离均大于校验精度范围,则剔除该定位模块数据,使用其他定位模块数据定位。
4 实验与分析
在60 m×60 m的方形区域中,均匀安装5个定位模块,分别编号A1~A5。收发模块采用CC1101芯片,参数为:p0=-35 dBm,n0=2.1,d0=1。收发模块核心原理如图3所示。

图3 收发模块原理
信号强度受气温、气压等外界条件[10]和传感器芯片自身的误差的影响,经测试CC1101芯片测距范围在30 m内效果较好,目标模块有10个,ID编号01~10、定位模块测距精度为2 m,校验精度2 m。对所有目标模块进行定位,结果如表1、图4所示。

表1 定位数据

图4 CC1101信号强度测距定位结果
通过试验数据可得定位模块正常测距时定位精度基本处于测距精度2 m以内,当有定位模块测距超出有效定位距离以及出现异常时定位精度基本不受到变化。与一般三边测量法相比,校验模块可直接剔除不符合校验精度的数据,减少了粗大误差对定位结果的干扰;校验模块还可以检测到失效模块,方便维修。
5 结 论
本文提出了一种改进的三边测量方法。利用三边测量法得到多组定位坐标,通过校验模块剔除失效数据;通过定位坐标平均值筛选出较为符合的数据进行处理,得到较为准确的目标模块坐标,保证了在定位目标均正常工作的情况下的定位精度,缓解了传感器超出有效定位距离及当部分定位模块工作异常时精度大幅度下降以及维修定位模块时需寻找失效模块的问题。
