商用车稳态回转试验数据截取方法研究*
2019-03-05陈德兵张国振曾柯夏小均
陈德兵,张国振,曾柯,夏小均
商用车稳态回转试验数据截取方法研究*
陈德兵1,张国振2,曾柯1,夏小均1
(1.重庆车辆检测研究院有限公司 国家客车质量监督检验中心,重庆 401122; 2.工业和信息化部装备工业发展中心,北京 100846)
一般的数据截取方法没有考虑到商用车低速时速度,侧向加速度和横摆角速度的不稳定性,若将该不稳定性引入到数据分析结果中会造成数据结果一致性差的问题,提出了将侧向加速度为0.5m/s2时作为截取阈值,排除侧向加速度为0.5m/s2之前数据点的不稳定性,试验证明该方法在准确反映车辆稳态回转特性的基础之上,可显著提高实验数据处理结果的一致性。
汽车稳态回转试验;数据截取;数据一致性
引言
稳态回转试验是整个操稳试验类型中一个重要权重占比很大的试验,具有一票否决权[1],但是在实际的过程应用中经常会出现同一台车在相同工况下试验重复性和数据分析结果一致性差的问题,已有文献[2]指出,操稳试验中试验数据处理是较大的难点,也有文献[1]指出,对于试验条件、试验方法、及数据处理方法的微小差别,结果往往相差很大。赵鹏举认为当速度达到最大时之前的数据都是有效数据,当速度由最大开始减少时汽车此时不再是稳态的状态,这一部分数据不应该选取,因此提出了速度最大截取法[3]。时付伟在分析稳态回转实验数据时选择速度从零开始到最大整个实验过程的数据进行分析[4]。但是商用车低速时速度,侧向加速度和横摆角速度状态不稳定,若将该不稳定性引入到数据分析结果中会造成数据结果一致性差的问题,因此,本文基于标准计算方法,细化各过程变量,分析了在0.5m/s2前车辆及对应数据的不稳定对最终数据处理的影响。通过将侧向加速度为0.5m/s2时作为截取阈值,消除掉侧向加速度为0.5m/s2之前的数据点的不稳定性,该方法在不改变原始测量曲线所包含的重要信息基础之上可以显著提高数据分析结果一致性,后文将以实测数据曲线进行说明。
1 实验数据分析方法
1.1 经验截取方法
最初经验截取方法没有考虑太多的经验积累,凭直觉从侧向加速度从平缓开始上升处到达到最大侧向加速度的整个时间段进行截取,例如某一次实验数据的侧向加速度如下图1所示。
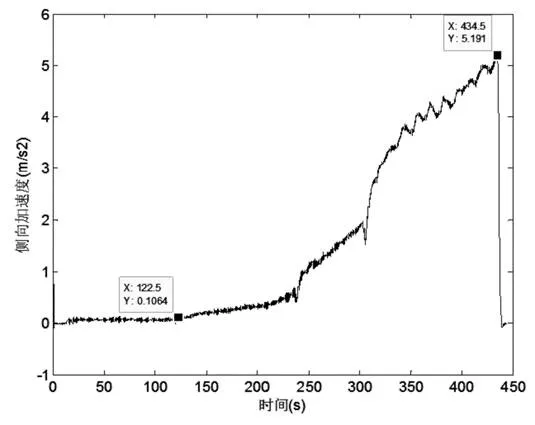
图1 侧向加速度随时间变化曲线
从图1中可以看出,初始截取点的选择全凭经验观察,没有定量的指标去标定。不同的实验员经验不同,认知不同,可能会截取出不同的数据段。那么采用该种截取方法截取实验数据,对以下六组实验数据进行分析,初始变量状态都为标准状态,研究原始截取方法对实验数据结果及一致性的影响,选择Data1,Data2,Data3,Data4,Data5,Data6共6组实验数据,其工况因素如下:车辆类型为恒通公交车,Data1,Data2,Data3驾驶员为A,Data4,Data5,Data6驾驶员为B,陀螺仪安装位置为质心位置,实验前,前后轴边胎胎压均为6.3bar,轮胎类型前轴为卢河、后轴为朝阳,试验过程中方向盘固定,驾驶员加速过程采用缓慢加速纵向加速度维持在0.1m/s2左右,陀螺仪品牌为ADMA陀螺仪,回转半径为15m,载荷状态为空载,每天的实验之前都经过充分且稳定的轮胎预热,正式实验前轮胎胎压处于稳定状态。
对上述6组实验数据应用经验数据截取方法来截取待分析段数据,以研究数据截取方法对实验结果一致性的影响,如表1所示。Data1,Data2,Data3三组数据为右转实验数据,从分析结果可以看出,计算得到的R0最大最小值之间存在0.41m的误差,不足转向度U最大值与最小值之间存在0.19(deg/(m/s2))的误差,误差都相对较大,而这三组实验工况的变量因素都相同,唯一存在不确定性的是截取数据时没有统一的量化指标而凭经验截取,这种截取方法本身是没有考虑到车辆启动初期速度和横摆角速度存在不稳定性,这种不稳定性会引入到数据分析过程,因此数据截取的目的就是要避免这一因素影响。同样的取另外三组数据Data4,Data5,Data6,这三组数据与Data1,Data2,Data3三组数据为同一工况,也即变量因素相同,不同的是回转方向为左转,可以看出R0在Data5和Data6两组实验下完全一样,不足转向度U也相差不大,但是Data4下的R0为13.6m与Data5和Data6相差了0.6m左右,同时不足转向U差别也较大,值得注意的是不足转向在三次实验下均超过1.1(deg/(m/s2)),从驾驶员和实验员的主观评价来看车辆并没有这么大的不足转向度,与实际不符。
表1 经验截取方法数据分析结果

1.2 侧向加速度截断法
要分析1.1节不足转向度一致性不好的原因,我们首先从标准GB/T 6323-2014中计算不足转向度的理论公式出发进行推导,由标准可知不足转向度为前后轴侧偏角差与侧向加速度关系曲线上侧向加速度为2m/s2处的平均斜率(纵坐标值除以横坐标值计算),于是1.1节Data4,Data5,Data6三组实验数据的前后轴侧偏角差与侧向加速度关系曲线如下图2所示,从图2中可以看出侧向加速度为2m/s2处的前后轴侧偏角差的对应关系如图2中红色竖线所示,Data5,Data6两组数据在2m/s2处的前后轴侧偏角差基本吻合,Data4与上述两组相差较大,因此计算得到的不足转向度Data5和Data6基本吻合,而Data4会有较大偏差。

图2 前后轴侧偏角差随侧向加速度变化曲线
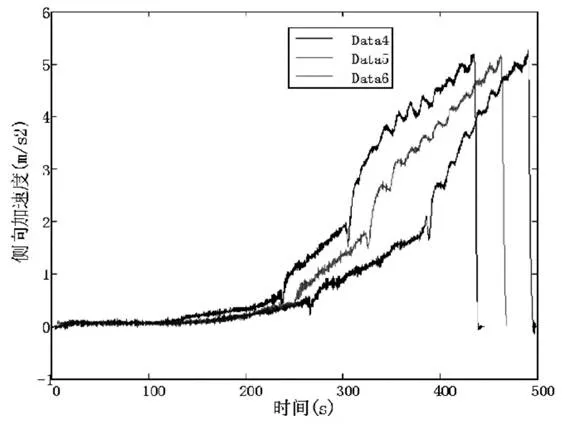
图3 侧向加速度随时间变化曲线
造成上述偏差的原因可以层层追溯,一般来说驾驶员的操控细则在给定的情况下加速过程是基本一致的,如下图3所示,Data4,Data5,Data6三组实验的侧向加速度随时间变化曲线,从图3中可以看出三条侧向加速度曲线只是存在一定的相位差,但是变化趋势基本一致。侧向加速度趋势一致,那问题就落在了前后轴侧偏角差上。
根据前后轴侧偏角差的计算公式,如下式,可知第k点转弯半径R主要由速度v和横摆角速度γ共同决定,R0为初始转弯半径,即侧向加速度与转弯半径拟合曲线侧向加速度为零处的值,R0值主要影响前后轴侧偏角差值的整体大小。

分析Data4,Data5,Data6三组实验的Rk曲线如下图4所示,从图4中同样可以看出三组实验Rk随时间的变化趋势基本一致,再一次印证了三次实验驾驶员加速过程的一致性。
Rk的一致性已经保证的前提下,前后轴侧偏角差唯一的影响因素就是R0,从表1中可以看出Data4组的R0为13.60m,Data5,Data6的R0为12.97m,理论上讲R0会影响前后轴侧偏角差在Y轴方向的高低,从图4所反映的曲线高低也可以得到印证,Data5,Data6基本重合,而Data4组的曲线相对上移。由此可见造成Data4不足转向度一致性差的主要原因是由于R0值偏差较大。下面将分析Data4,Data5,Data6三组实验初始半径R0的计算过程,下图5为Data4,Data5,Data6三次实验转弯半径Rk与侧向加速度关系曲线,图中红色曲线为拟合后的结果。

图5 转弯半径Rk随侧向加速度变化曲线
根据拟合曲线取侧向加速度为0m/s2时的Rk作为初始半径R0值,所得结果如表1所示分别为13.60m,12.97m和12.97m,可以看出Data4,Data5,Data6的R0值不同是由于转弯半径Rk与侧向加速度拟合曲线的偏差导致的,进一步分析图5可以看出,在侧向加速度0-0.5m/s2区间,转弯半径Rk随侧向加速度存在较大的波动,这主要是由于商用车体积质量大,其在低速时候速度、横摆角速度和侧向加速度都不稳定,存在较大的波动性,当速度逐渐提升后上述三个测量物理量的关系才会逐渐趋于稳定,从图中可以看出基本上在0.5m/s2后会趋于稳定。
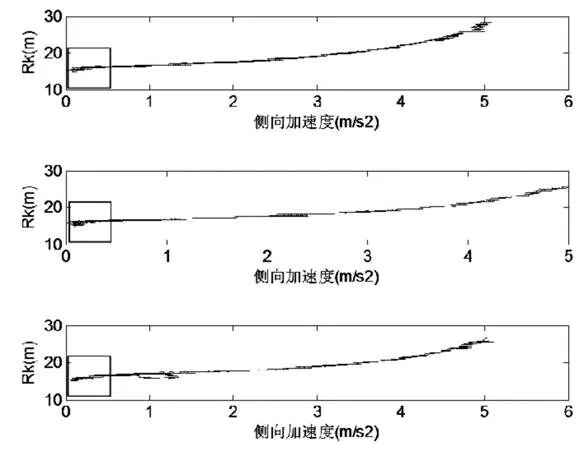
图6 转弯半径Rk随侧向加速度变化曲线
分析Data1,Data2,Data3三次实验转弯半径Rk与侧向加速度关系曲线同样会发现类似的问题,如图6中红色方框所示,在0-0.5m/s2下车辆的状态不稳定。
由此可以引出一种新的数据截取方法,即将0.5m/s2之前的数据截取掉,以0.5m/s2作为数据开始截取点的阈值,终止点截取方法不变。采用新的数据截取方法,对Data1,Data2,Data3,Data4,Data5,Data6六组数据重新进行处理。得到得结果如下表2所示,从表中可以看出相对于表1,数据的一致性得到较大的改观。
表2 Rk值法截取数据后分析结果

2 结论
商用车在低速状态下不稳,在处理稳态回转实验数据过程中需要回避车辆速度不稳的状态,从大量的实验经验结果中可以总结出将侧向加速度0.5m/s2作为车辆从初始状态到稳定状态过渡的阈值,数据处理过程中就可以将侧向加速度为0.5m/s2之前的数据截取掉,只分析从0.5m/s2之后到最大侧向加速度之间的数据,这样就可以从数据分析的角度提高实验结果的一致性。
[1] 井广红,王锋,宣晨阳.稳态回转试验数据处理方法研究[J].轻型汽车技术,2015,(5): 35-7.
[2] 郭润清,姜兆娟,高明秋.汽车操纵稳定性道路试验和评价系统设计[J].北京汽车,2015, 1): 37-41.
[3] 赵鹏举.基于LabVIEW的汽车稳态回转试验数据分析[J].汽车实用技术,2015,11): 99-102.
[4] 时付伟.基于ADAMS的客车操纵稳定性仿真及试验研究[D];长安大学,2014.
Research On The Influence of The Experimental Results On Data Interception Methodof Commercial Vehicle Steady Rotation Test
Chen Debing1, Zhang Guozhen2, Zeng Ke1, Xia Xiaojun1
(1.Chongqing Vehicle Test & Research Institute Co., Ltd., National Coach Quality Supervision and Test Center, Chongqing 401122; 2.Ministry of Industry and Information Technology Equipment Industry Development Center, Beijing 100846)
This paper analyses that the original data method does not take into account the instability of speed, lateral acceleration and yaw velocity of commercial vehicles at low speed. If the instability is introduced into the data analysis results, the problem of poor consistency of data results will be brought forward. When the lateral acceleration is 0.5m/s2, as the interception threshold, the instability of the data points before the lateral acceleration is 0.5m/s2is neglected. This method can improve the consistency of the experimental results from the perspective of data analysis.
vehicle steady rotation test; data Interception; data consistency
B
1671-7988(2019)03-95-03
U467
B
1671-7988(2019)03-95-03
U467
陈德兵,就职于重庆车辆检测研究院有限公司,高级工程师,长期从事汽车整车领域测试技术研究。
重庆车辆检测研究院有限公司科技发展基金项目(17AKC21)。
10.16638/j.cnki.1671-7988.2019.03.029
