基于熟练驾驶换道特征的车辆换道轨迹规划研究
2019-03-05谢建毅
谢建毅
基于熟练驾驶换道特征的车辆换道轨迹规划研究
谢建毅
(常州通宝光电股份有限公司,江苏 常州 213001)
传统的换道路径规划方法在车辆进行换道路径规划时往往只考虑车辆运动学及动力学约束,所生成的换道路径与熟练驾驶员驾驶车辆的行驶轨迹有很大差别。因此,文章通过研究熟练驾驶员的换道行驶路径特征,提出了一种仿熟练驾驶员换道路径规划方法,能够有效提高汽车舒适性。
换道特征;路径规划;轨迹规划
1 引言
换道行为是汽车在道路行驶操作中的重要组成部分之一,涉及车辆的横向和纵向速度与位移的同时变化[1]。在考虑障碍物、道路形状以及车辆动力学等因素影响的基础上,采用人工势场法、最优控制等先进算法进行路径规划时,会导致轨迹曲率发生突变[2]。换道路径的优劣严重影响着汽车的平顺性和舒适性,采用曲率连续的曲线所规划的路径能够满足车辆运动学及动力学的要求[3]。基于曲率连续曲线所生成的行驶路径的特征与控制点的选择有很大的关系,当换道开始与结束位置确定时,根据运动学约束可以规划出一条平滑的行驶路径。然而在换道起点与终点相同的情况下,不同类型的驾驶员所选择的换道路径也会不同,换道过程状态往往会对车辆行驶舒适性造成影响。
传统的换道轨迹规划算法往往只考虑车辆安全性及运动学和动力学的约束,不能满足不同乘客对车辆舒适性的要求[4-5]。针对现阶段换道轨迹算法只考虑换道结束位置,不考虑换道过程的问题,本文通过邀请不同的驾驶员驾驶不同的试验车辆进行换道操作,同时记录下换道行驶路径,分析换道过程特征点和换道结束位置点的特性。采用多项式对试验轨迹进行拟合,得到不同驾驶员在不同工况下所选择的换道行驶路径。基于试验所得到的最优轨迹数据库,采用MATLAB自带的神经网络工具箱建立熟练驾驶员换道模型,提出一种基于熟练驾驶员的换道轨迹规划算法,能够满足不同类型乘客对车辆行驶舒适性的要求,减少汽车乘客的晕车概率。
2 试验及数据处理
2.1 换道试验
为了研究不同驾驶员在不同工况下换道操作的特性,本文通过邀请5位熟练驾驶员进行实车换道试验,驾驶员信息如表1所示。由于驾驶经验和个性的不同,不同驾驶员的驾驶习性将会不同,根据驾驶员驾驶习性的不同,我们把驾驶员分为激进型、中间型和保守型三种。在行驶过程中,车辆由于避障或超车等原因需要进行换道操作。本实验把换道分为两个工况:避障换道和普通换道。出于安全考虑,通过改变实验桩的位置来模拟不同的障碍距,图1所示为进行避障实车实验。
表1 熟练驾驶员信息

图1所示为相同速度下不同驾驶员所选择的换道轨迹。可以看出,驾驶员的驾驶特性是影响行驶路径的重要因素之一。
2.2 试验数据处理
根据以上研究已经得到优秀驾驶员驾驶的车辆在换道时所行驶的路径采样点数据,为了计算的简便,在不考虑垂向运动的情况下,我们只需要拟合二维平面坐标(xg,yg)。图2所示为换道路径示意图。
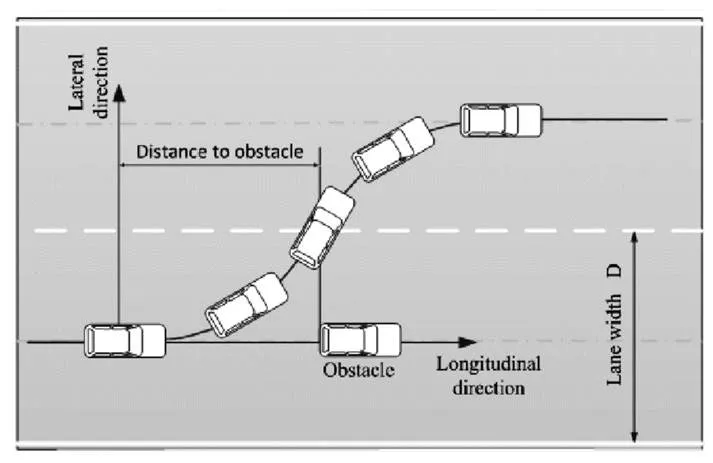
图2 换道路径示意图
路径曲线的曲率连续是影响车辆平稳行驶最重要的因素之一。因此,只需确定各工况下换道过程特征点坐标及换道结束纵向距离就可以得到此工况下的理想换道轨迹表达式。多项式表达式简洁明了,各阶导数连续,且只需要改变各项系数,就可以得到不同的形状。因此,本文使用多项式曲线可以准确拟合出不同工况下的行驶路径。通过确定车辆换道起点和终点的状态,很难刻画出熟练驾驶员换道过程中的特征,需加入换道过程状态约束。通过对试验数据进行分析,将整个换道过程可以分为三个阶段:避撞、回转及调整阶段,用回转阶段末的车辆位置状态(x,y)作为换道过程点的状态约束。考虑起点和终点一阶及二阶导数为零的约束,采用六次多项式作为换道轨迹的表达式,如式所示:

3 仿熟练驾驶员操纵特性的换道路径规划
为了提高汽车在换道工况下的舒适性,以不同类型的熟练驾驶员在不同工况下所选择的试验路径数据为基础,采用MATLAB自带的神经网络工具箱建立熟练驾驶员换道路径规划模型。训练模型输入有速度、驾驶类型、换道意图以及障碍距离,输出为车辆过程点状态坐标(x,y)和结束点纵向距离x。此外,车道宽D为已知量。如表2所示为神经网络训练数据分类。
表2 训练数据
Table2 Training data

4 仿真分析
为了验证本文提出的仿熟练驾驶员换道路径规划算法在不同工况下的性能,基于软件,进行了不同工况下的仿真试验。
设置避障仿真试验工况:驾驶类型为激进型,速度40km/h,车道宽为3.75m,开始转向时前方障碍距本车35m。图3(a)为激进型驾驶员在车速为40km/h下仿真换道轨迹和实际轨迹。图3(b)为避障换道仿真轨迹与实际轨迹之间的横向偏差,最大横向偏差仅为0.075m,精度较高。
5 总结
本文提出了一种新的汽车换道路径规划方法。可以根据车辆的车速、换道意图、障碍距以及驾驶风格实时地输出一条能够使车辆平稳行驶的路径。首先通过大量的实车实验得到熟练驾驶员在不同工况下所选择的换道行驶路径,接着提取每条换道轨迹的结束点以及过程特征点,得到每条路径的表达式。然后基于神经网络建立熟练驾驶员模型,并采用实验数据进行训练。最后通过仿真试验可以看出,本文所设计的算法能够根据车辆行驶工况及驾驶类型的不同,生成一条理想的换道轨迹,此路径与相同工况下熟练驾驶员所选择的换道轨迹基本吻合。因此,本文提出的换道路径规划算法可以模仿熟练驾驶员实现换道,提高汽车换道行驶时的稳定性,增加了乘客的舒适性,同时还能够实现无人驾驶车辆的个性化行驶。
[1] 陈涛,李晓旭,孙林,等.智能车辆设计中驾驶员模型回顾与展望[J]. 汽车技术,2014(6):1-6.
[2] 朱曼曼,杜煜.基于智能车的决策系统关键技术的综述[J].北京联合大学学报(自然科学版),2015,29(1):70-74.
[3] Korayem, M.H.; Nekoo, S.R. The SDRE control of mobile base cooperative manipulators: Collision free path planning and moving obstacle avoidance. Robot. Auton. Syst. 2016, 86, 86-105.
[4] 杨帆.无人驾驶汽车的发展现状和展望[J].上海汽车,2014,3:35-40.
[5] 张文明,韩泓冰,杨珏,等.基于驾驶员行为的神经网络无人驾驶控制[J].华南理工大学学报(自然科学版),2016,44(12):74-80.
Investigation of a vehicular channel trajectory plan base on that characteristic of skilled drive
Xie Jianyi
( Changzhou tongbao optoelectronics co., LTD, Jiangsu Changzhou 213001 )
Lane-changing is an important operation of the intelligent vehicle driving on the road. Only the kinematic and dynamic constraints are taken into account in the traditional path planning methods, and the path generated by the traditional methods is very different from the actual trajectory of the vehicle driven by the experienced driver.In this paper, a path planning method for imitating the lane-changing operation of experienced driver is presented by studying the characteristics of lane-changing path of the experienced drivers. The results show that the method can effectively improve the passenger comfort of intelligent vehicles.
Lane change feature;Path planning;Trajectory changing
A
1671-7988(2019)03-67-03
U471.1
A
1671-7988(2019)03-67-03
U471.1
谢建毅,就职于常州通宝光电股份有限公司。
10.16638/j.cnki.1671-7988.2019.03.019
