基于压电陶瓷驱动的新型快速伺服刀架设计
2019-03-01王森白素平闫钰锋张占鹏
王森,白素平,闫钰锋,张占鹏
(长春理工大学 光电工程学院,长春 130022)
快刀伺服技术[1]是通过驱动装置使刀具快速进刀,配合主轴的回转运动与定位平台的径向进给运动,在通过数控技术实时控制金刚石车刀的走刀路径,实现微透镜阵列、全息透镜等复杂面型零件的加工,具有高精度、高频响的特点。常用来加工微结构光学元件的刀架一般选用压电陶瓷作为驱动装置,在研究过程中,如何处理快刀伺服系统中行程与频率的关系,一直以来都是一个难题[2]。在实际工作中,有时需要压电陶瓷提供很高的振动频率,相应的加工行程就会很小,难以完成高精密零件的加工。同时由于目前快刀伺服装置多采用直圆型柔性铰链来实现位移传递,显著降低了系统的抗疲劳强度。近几年,具有复杂面型的微结构元件如微透镜阵列、全息透镜等越来越广泛的应用于军事,医学等高科技领域。随着光学系统对微结构表面提出越来越高的要求,导致现有的快刀伺服装置无法完成高性能光学表面的加工,所以需要研制新型快速伺服刀架,提升其幅频特性与抗疲劳强度,以满足微结构零件的加工条件。
本研究的目的是通过引入平面柔性铰链设计一款压电陶瓷驱动的新型快速伺服刀架,在提高装置的抗疲劳强度与振动频率的同时还能保证一定的加工行程,可用于手机显示屏,光学液晶显示屏等光学元件中的微透镜阵列的加工。
1 快刀伺服刀架的总体结构分析
在快刀伺服加工中,起到关键作用的是实现高频响精密进刀运动的快刀伺服系统[3,4]。快刀伺服系统的行程、频率以及动静态特性是需要解决的重点技术。结合微透镜阵列的加工要求,本文确定的设计要求是加工时刀具的最大行程为50μm,在0~20μm的位移内振动频率达到250Hz且定位精度达到0.1μm。
本文拟选用的驱动元件是德国PI公司生产的压电陶瓷驱动器,型号为P225.80,标称行程可达到120μm,空载谐振频率≥4000Hz,主要指标见表1。压电陶瓷型快刀伺服刀架一般不具备较大的工作行程,但它具有响应速度快、中间传动少、便于操控、定位精度高等优点。

表1 压电陶瓷主要性能参数
结合设计要求和选用的驱动装置,设计了如图1所示的快刀伺服装置。主要部件包括车刀平台,平面柔性铰链,压电陶瓷驱动器,预紧螺杆,预紧螺母。在加工前可以通过预紧螺杆上的螺母对压电陶瓷施加所需的预紧力。
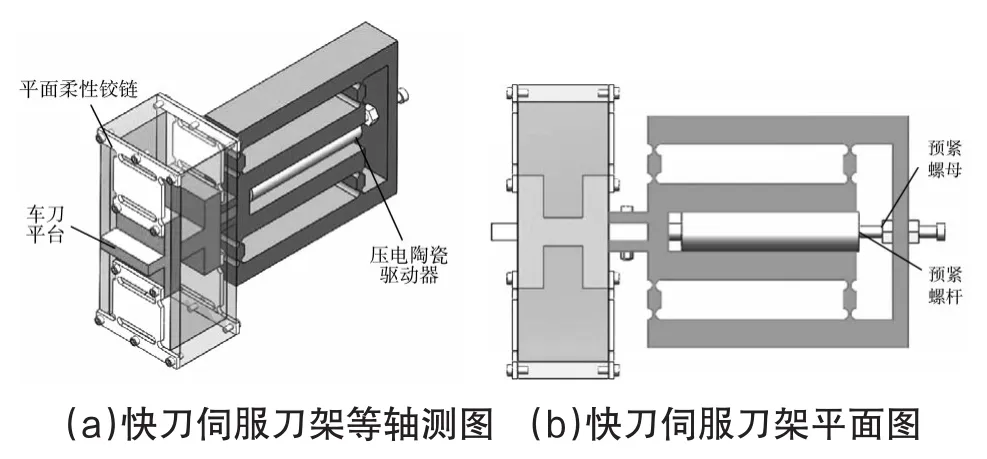
图1 快刀伺服刀架总体结构图
2 快刀伺服刀架的设计
2.1 柔性铰链刀架设计
常见的直圆型柔性铰链导向机构可利用其薄弱部分的可塑性变形来传递位移,同时因为其无机械摩擦,传动精度高等优点,适用于快速伺服装置[5]。但由于直圆型柔性铰链结构简单,加工时的高频振动会导致其薄弱部分易产生疲劳,从而造成刀架损坏。针对此问题,设计了一种平面柔性铰链作为导向机构,提高抗疲劳强度的同时保证了刀具的振动频率与加工行程。
本文选用平面柔性铰链作为基础,设计了如图2所示的刀架结构,主要由平面柔性铰链固定装置和U型保护装置构成。前面选用新型平面柔性铰链作为位移传递的导向机构;后面压电陶瓷的保护装置设计成一个U形结构,与之相连的8个对称分布的直圆型柔性铰链可以保证压电驱动器不承受非运动方向上的力。同时由于整个结构关于中心轴线对称,在运动过程中避免了附加位移的产生,保证压电陶瓷的输入位移沿工作方向直线传递。结合本文的设计要求,可选用结构钢作为伺服刀架的整体材料,主要参数如表2所示。
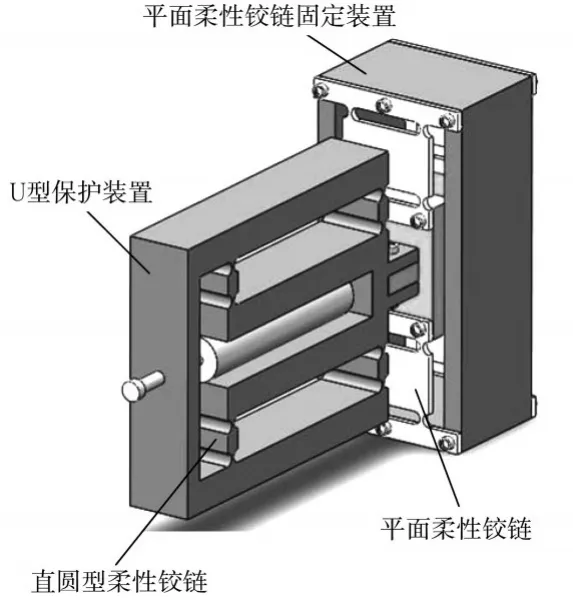
图2 柔性铰链刀架结构

表2 结构钢主要参数
2.2 设计原理分析
本文选用压电陶瓷作为驱动装置,因此要设计出一个刀架结构来准确传输压电陶瓷的位移。为了便于分析,可以将刀架工作结构简化为图3所示的柔性铰链导向机构。
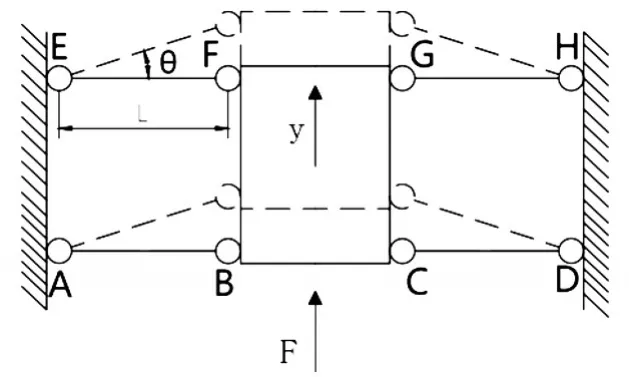
图3 伺服刀架运动机构简图
如图3所示,压电陶瓷提供的驱动力为F,机构发生的位移为y,铰链发生的角位移为θ,设单个铰链的转动刚度为K,根据功能原理可得到:

由于角位移θ足够小,可做近似得:

角位移θ足够小,柔性铰链的变形量很少,计算中可忽略拉伸作用的影响,可以得到运动机构的刚度:

由式(3)可知运动机构的整体刚度主要由单个柔性铰链的转动刚度K以及铰链之间的长度L确定,而平面柔性铰链的转动刚度K[7]主要由铰链的最小厚度t及切口半径R确定。
2.3 平面柔性铰链的参数设计
如图4所示,经过分析可知平面柔性铰链的性能[6]主要取决于三个参数:切口半径R,铰链的最小厚度t,铰链的长度L。最小厚度t是影响三个方向上刚度的最主要参数,切口半径R主要影响竖直方向上的刚度,长度L主要影响进刀方向上的刚度。所以在设计和优化柔性铰链时,要合理的选择R、t、L使伺服刀架的刚度和固有频率达到最优。
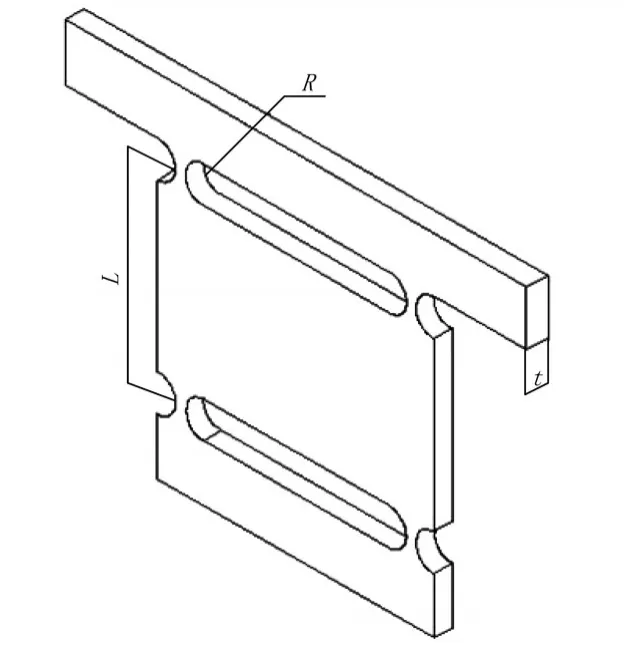
图4 平面柔性铰链
切口半径R分别取1.5mm、2mm、2.5mm;t的取值范围为0.5~2mm,每组间隔设置为0.5mm;长度L分别取18mm、20mm、22mm、24mm。在参数设计时,分别确定R、t、L中的两个,考察另一个参数对刀架的影响,其关系如图5所示。
其三,从其所处的“位置”来看,他们直接面对老师与学生,他们是学校教学、科研和育人的排头兵,他们的能力如何,德性怎样,最受师生关注。在高校,尤其是“教学型”或者是“教学科研型”的地方大学,其“主业”就在于培养人才。何况就任何大学来说,大学的竞争就等于学生的竞争;大学的竞争力,最直接的表现就是学生的竞争力。从这个角度看,说“学生培养质量是大学核心竞争力”是恰到好处的[3]。作为育人基本“单元”的院(系),它的教学、科研以及管理和学生工作的“终极目的”就是人才培养,而院(系)和其他部门的中层管理者,正是人才培养一线的“排头兵”,他们的优劣,一定程度上决定着一所高校的“成败”。
从图5(a)中可以看出,随着切口半径R的增加,铰链刚度不断变小,一阶固有频率不断增加;从图5(b)可以看出,随着厚度t的增加,铰链刚度不断增加,一阶固有频率不断增加;从图5(c)中可以看出,随着长度L的不断增加,铰链刚度不断减小,一阶固有频率不断减小。综合考虑各种因素,为了减小进给方向上的刚度,提高水平方向上的刚度,还要保证整体刀架的固有频率,最终确定切口半径R为2mm,铰链厚度t为2mm,铰链长度L为22mm。
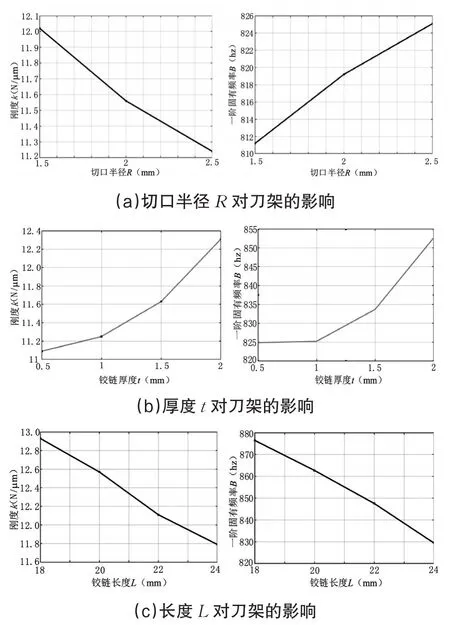
图5 平面柔性铰链的参数设计
2.4 柔性铰链的性能仿真
在确定柔性铰链刀架的总体结构后,利用ANSYS软件对其力学性能进行有限元分析。柔性铰链刀架的动态响应性能和固有频率对于快速进刀的影响很大,因此需要对所设计的柔性铰链进行静力学分析与动力学分析,确定柔性铰链的参数设计是否合理。分析开始前,结合前文选材设定刀架的材料为结构钢,并将主要参数如弹性模量、密度等设定正确。
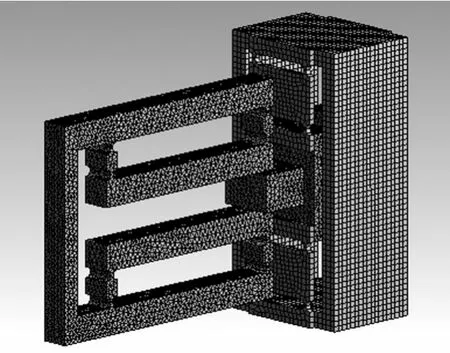
图6 刀架网格划分图
为了提高分析的时效性,对有限元模型做了一定简化,省去了一些分析中可不考虑的因素,如螺纹孔、刀具安装孔等。可以这样简化的原因是当整个刀架在受到驱动力时,柔性铰链的变形使刀具产生了工作方向上的位移,而起固定作用的外框并不会产生位移。之后对整体刀架结构进行网格划分,为了提高整体分析的准确性,网格尺寸设定为2mm,划分结构如图6所示。
(1)位移分析
分析时,将刀架的上下外框侧面固定,在压电陶瓷驱动器与柔性铰链的接触面处沿进刀方向施加ΔX的位移,ΔX的取值范围为0~50μm,间隔为5μm,如图7所示。

图7 位移分析
通过分析可得压电陶瓷输入位移与刀架输出位移的关系,如图8所示。
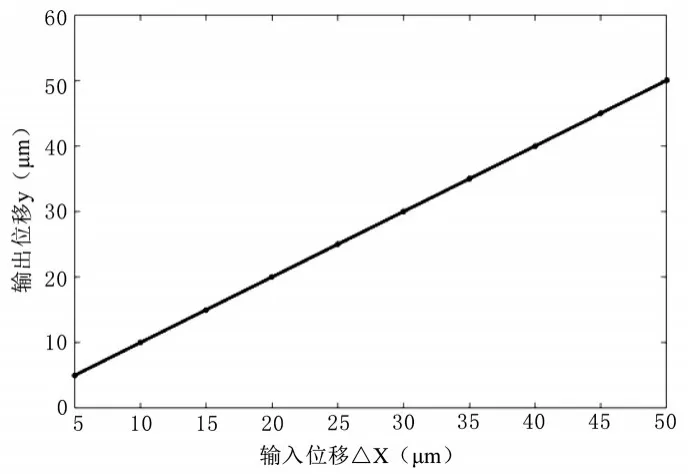
图8 位移关系
从图6可以看出,对刀架输入50μm的位移载荷时,刀具的最大输出位移为50.014μm,达到了最初设计时所设定的目标。而且可以得到在0~50μm内,压电陶瓷输入位移与刀架输出位移之间具有良好的线性关系,这说明导向机构传递位移较为准确,进一步证明设计时的参数选用较为合理。
对刀架施加50μm的位移时,利用ANSYS软件中的Force Reaction指令分析刀架达到50.014μm位移时,所需要的推力为615.76N,如图9所示。利用刚度计算公式可得:

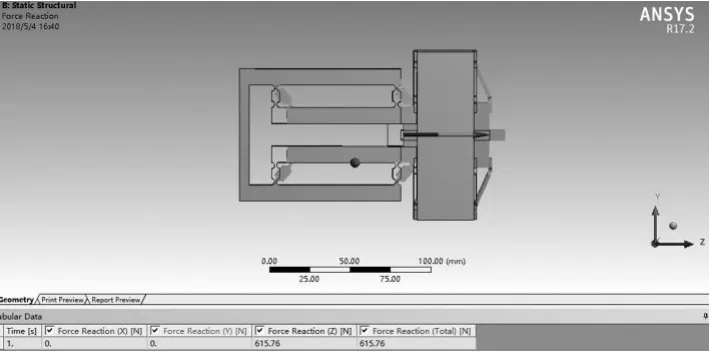
图9 50μm时所需推力示意图
(3)应力分析
刀架输出的位移主要依靠柔性铰链的变形产生,而在铰链的最薄弱处往往会产生较大的应力。为了保证铰链在工作时不会因应力过大而造成断裂,即使用时安全系数是否大于1,应当对刀架达到最大位移时进行应力分析,在位移与刚度分析的基础上,在Solution处选择Maximum Principal Stress命令,分析结果如图10所示。
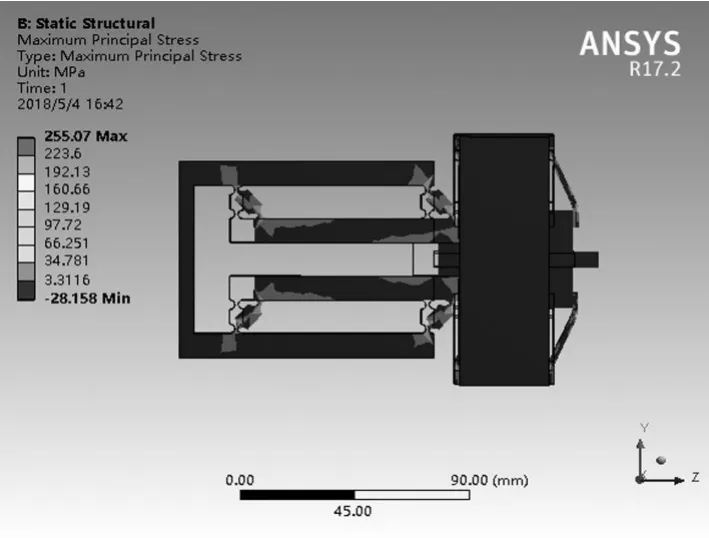
图10 50μm时刀架的应力分布
从图10可以看出,最大应力载荷为σmax=255.07Mpa,本文所采用的材料为结构钢,屈服强度为σs=460Mpa,由此可推出安全系数为:

结合相关资料[7]可以得到,在材料仍选用结构钢的情况下,当采用直圆型柔性铰链时,快刀伺服刀架的安全系数不超过1.4,与上式的安全系数对比可知平面柔性铰链的抗疲劳能力更为优秀。
(4)模态分析
为了避免刀架在工作中由于共振而引起刀架的损坏,要对设计的结构进行模态分析。分析前,同样将刀架的上下外框面进行固定,设定模态分析的阶数为4阶。图11和图12为刀架模态分析得到的前两阶振型,还可以得出表3所示的数据。
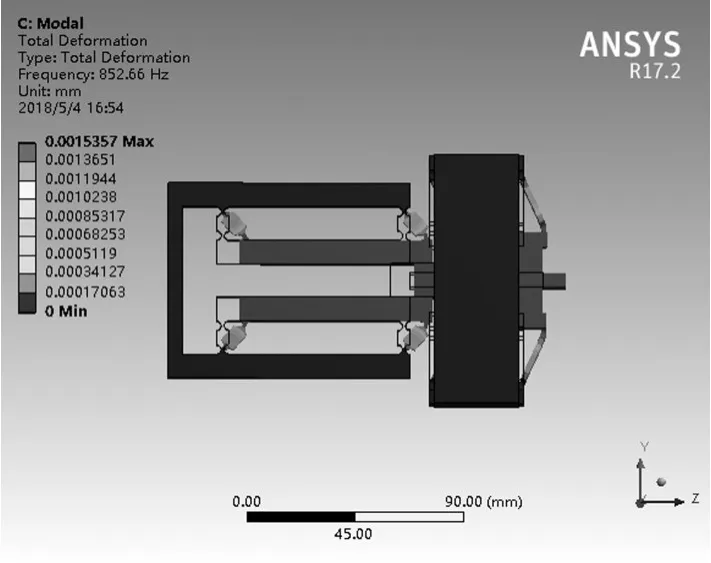
图11 刀架的1阶模态示意图
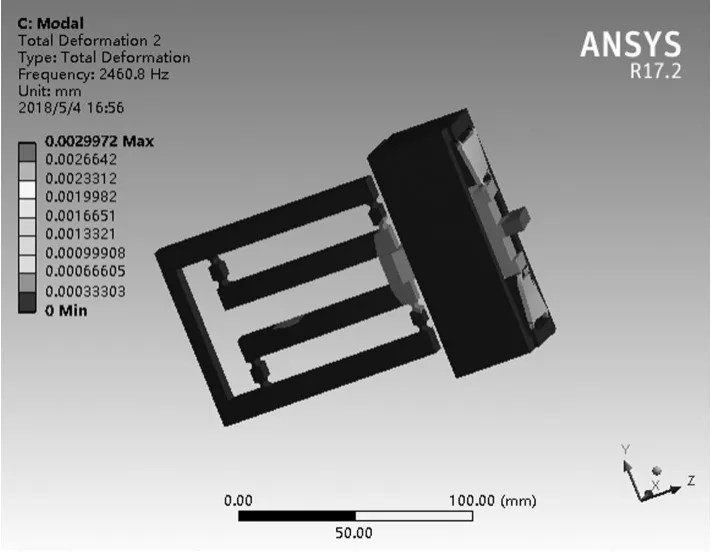
图12 刀架的2阶模态示意图

表3 刀架的模态分析结果
经过分析可知刀架的一阶振型正是工作时刀架的进刀方向,模态频率f1=852.66hz。因此在实际加工时,工作频率应当远离852.66hz。
(5)谐振分析
为了更加深入的了解刀架工作频率对加工结果的影响,可以利用有限元分析软件对刀架进行谐振分析[8]。设计要求为在0~20μm内工作时频率应达到250Hz,结合前面所求出的刀架刚度以及软件中的Force reaction指令可以知道在位移达到20μm时所需推力为246.304N。在谐振分析中,将刀架外框的侧面固定,在接受压电驱动器推力的面上施加246.304N的正弦激振力,激振频率设置为0~1000Hz,间隔设定20,如图13所示。选取刀架与道具连接处一点,经过分析可以得出此点在工作方向上的位移响应曲线,如图14所示。从图中可以看出,当激振频率在450Hz以下时,选取点的响应处于平稳状态,当激振频率达到850Hz时,选取点的位移响应会产生突变。当激振频率处于250Hz时,从图15中可以得出选取点的位移响应为0.021674mm,与刀架受到246.304N静态力时的响应误差约为0.001674mm,由于位移的计算并不精确以及刀架的传递误差等,此响应误差在可接受的范围内,因此判定刀架在250Hz的频率下可以正常工作。

图13 谐振分析边界条件

图14 刀架的谐响应曲线
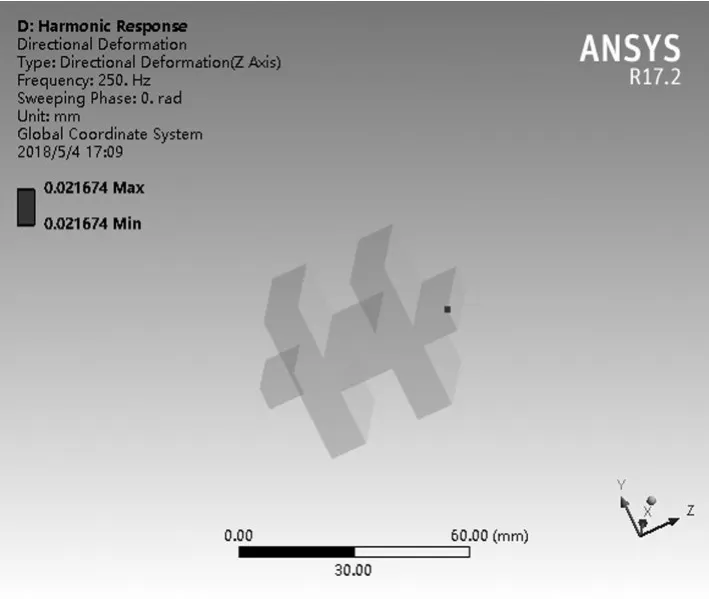
图15 250hz频率时选取点的位移
3 结论
本文通过引入平面柔性铰链并对其进行参数设计,在配合压电陶瓷的合理选用,从理论上设计了一种压电陶瓷驱动的新型快刀伺服刀架。采用平面柔性铰链导向机构对压电陶瓷的输入位移进行传递,提升了铰链的抗疲劳强度,提高了加工时的振动频率,保证了刀具的加工行程。利用有限元分析软件对刀架进行仿真研究,完成了位移分析,刚度分析,应力分析,模态分析以及谐振分析。通过有限元分析,为所建立的新型快刀伺服刀架设计提供了理论基础。