基于图像识别的分光器端口分析方法
2019-02-27杜传业
杜传业 刘 波
(中国移动通信集团河北有限公司,石家庄,050000)
引 言
数字图像处理与识别技术已经取得了深入和迅速的发展,人脸识别[1-2]、车牌识别[3-4]、手写汉字识别[5]等技术已经得到了实际应用,例如结合深度学习领域的卷积神经网络(Convolutional neural net⁃works,CNN)识别方法[6],验证了深度学习在手写汉字识别的应用;基于RCNN(Region CNN)的无人机巡检图像电力小部件识别的方法,可以达到每张近80 ms的识别速度和92.7%的准确率[6]。但图像识别在通讯设备领域还存在空白。
通信公司的设备资源包括基站、机房、分光器等各类资源,其中由于分光器自身不带电的特性,其端口占用情况一直靠人工审核现场照片判断,效率低下,成本高昂。
本文借鉴已有图像识别方法[7-9],提出一种针对分光器端口的图像识别算法,通过程序分析现场照片,过滤不良图片的同时,通过模拟时间延迟积分(Time delay integration,TDI)成像算法解析出分光器的分光比和被占用的端口号,提高了对分光器资源的管理能力和管理效率。
1 分光器识别算法流程
分光器图像数据来源于运维人员手机拍摄,其拍摄的图像质量很难得到保障。因此要提高分光器的识别效率,首先进行预处理,即对运维人员拍摄的图像进行过滤;然后再进行分光器解析。解析工作主要包括分光器端口位置判断、端口排列方向判断及端口占用判断。分光器识别整体算法流程图如图1所示。

图1 分光器识别算法流程图Fig.1 Sketch of optical splitter recognition algorithm
2 分光器识别算法过程
2.1 图像信息
图像数据来源全部为手机拍摄照片,由于拍摄人员不定且手机型号不定,所以图片大小不定。程序将所有图片统一处理为720像素×1 024像素或1 024像素×720像素(根据拍摄方向来确定),转为8位灰度图片统一处理。
2.2 图片预处理
选取某一天的运维图片作为图片样本库,运维人员拍摄图片时普遍存在以下几个问题:图像过黑、过亮、场景单一以及模糊[10-11],如图2所示。经过统计,所有照片中上述问题比例达到了60%。
本文将上述问题看作一个筛选合格图片和不合格图片的二分类问题,使用灰度均值(Mean)、标准差(Std)[12]和图像熵(Entropy)[13]作为图像特征,使用类间方差法作为阈值选取方法。以灰度均值为例,分别提取过黑图片库和合格图片库的灰度均值,将两类图片类间方差最大的值作为阈值。
由于分光器的端口颜色具有规律性,因此首先利用HSV颜色空间[14]对分光器端口进行初步判定。由于提取后的二值化图像含有不规则孔洞,不利于图像轮廓的分析,使用5×5的全1结构体进行闭运算,填补了孔洞,保证了分光器端口连通域的完整性。示意图如图3所示。
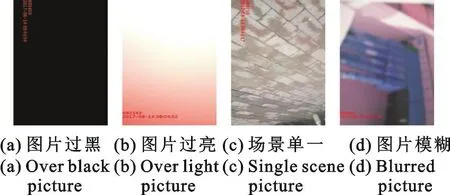
图2 问题图片示意图Fig.2 Pictures with defect
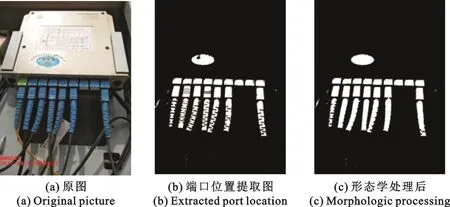
图3 HSV解析结果图像示例Fig.3 Example images of HSV resolution results
2.3 图像轮廓解析
图像的轮廓信息包括轮廓的连通属性、面积、Hu矩以及凸包分析等。本文选取轮廓面积作为条件进一步过滤分光器杂点,在剩余的轮廓中,提取每个轮廓的质心作为特征点,解析分光器端口的排列方向。利用分光器端口排列整齐的特点,提出分光器端口排列方向拟合算法(算法1),具体步骤如下:
算法1分光器端口排列方向拟合算法
输入:分光器轮廓二值化图像
输出:0为沿x轴排列,1为沿y轴排列
Step 1:提取每个轮廓的质心坐标(xi,yi),i≥2;
Step 2:对序列xi和yi进行排序,得到新的序列x′i和y′i;
Step 3:令Dxi=x′i-x′i-1,Dyi=y′i-y′i-1,Dxi和Dyi是各个轮廓质心坐标在x和y方向的差值序列,N和M分别为Dxi和Dyi小于阈值T的个数,T为经验数值;
Step 4:若N>M,则分光器端口沿x方向排列,否则,沿y方向排列。
2.4 拟TDI成像算法
TDI是一种电荷耦合器器件(Charge coupled device,CCD)成像方法,适用于高速移动的物体,其电荷转移方式对分光器端口识别具有启发意义。CCD通常适用于高速移动的物体成像,传统CCD成像结束后,直接输出N×N大小的图像,其像素值和CCD像元的电荷数有一一对应关系。TDICCD则是电荷不断累积的过程,很难确定像素值和某像元位置电荷数的关系[15]。TDI CCD显著优势是同一景物对多行线阵像元信号相加成像,输出信号等效电荷数为M级数中的总电荷数。与普通线阵CCD(尤其是面阵CCD)相比,TDI CCD减小了像元之间响应的不均匀性。
根据TDI相机成像原理和分光器端口排列方向,本文提出分光器端口识别与解析算法——拟TDI成像算法(以端口沿x方向排列为例,图像大小为N×M),示意图如图4所示。图中上方箭头为扫描端口的位置和方向,下方三角形面积代表扫描得到的“电荷数”,包含了端口位置和端口数。拟TDI成像算法具体步骤如下:
算法2拟TDI成像算法
输入:分光器轮廓二值化图像和排列方向
输出:分光器分光器比和分光器占用端口号
Step 1:设定初始扫描坐标(0,y),V(0,y)为像素值,y为某轮廓点集合中距原点最近点的纵坐标,V(i,y)为遍历到图像(i,y)的像素值,令Bucketj为收集“电荷”的容器,初始值为0,0≤i≤N-1,j=0,1,2,3,…;
Step 2:若 V(i,y)=0,V(i+1,y)> 0,则新建Bucketj=0保存此 时(i,y)的 值 ;若V(i,y)>0,V(i+1,y)> 0,则 Bucketj=Bucketj+1;若 V(i,y)>0,V(i+1,y)=0,则保存 Bucketj和此时(i,y)的值;
Step 3:根据Bucketj和经验阈值(即一般情况下一个分光器接口所占像素数),可以得到分光器端口数j和每个端口的位置坐标Bj(i,y),将资源系统中的分光比作为校验码,校验j。若相符,继续Step 4;否则,更新y重复Step 1;
Step 4:更新初始扫描位置(0,y′),重复 Step 1—3,得到
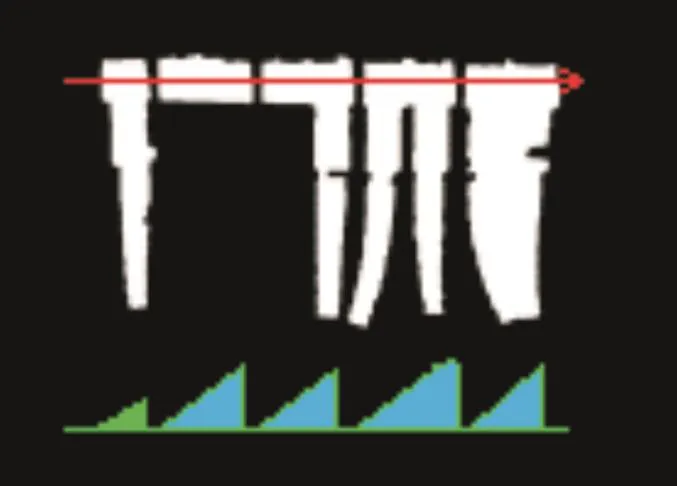
图4 拟TDI解析分光器端口示意图Fig.4 T DI-likely analytical splitter port schematic
3 实验结果分析
3.1 图像预处理实验结果
本文使用作者所在移动公司某日的运维图片库验证算法效果。首先,通过图像预处理过滤不良图像,图片库共有17 965张图片,共筛选出11 305张不符合条件的图片,成功将图片库中不合格图片过滤。不合格图片占比降低了60%以上,极大地减少了人工干预,提高了运维效率。部分预处理结果如图5—8所示。

图5 过黑图示例Fig.5 Examples of over black picture
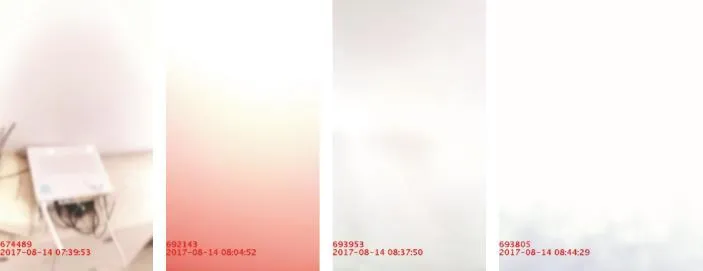
图6 过亮图示例Fig.6 Examples of over bright picture

图7 单一场景图示例Fig.7 Examples of single scene picture

图8 模糊图示例Fig.8 Examples of blurred graph
3.2 端口识别实验结果
然后对分光器图片进行端口识别,在剩余238张含有分光器的图片中,成功识别出分光器分光比的图片216张,包括1∶4和1∶8两种端口,而1∶16无法识别;成功识别出分光器占用端口号的图片205张,成功率达到了94.9%,标准差为0.19。端口识别结果如图9所示。
3.3 运行时间分析结果
本文实验在配置为i5-6300HQ,8 GB内存的笔记本电脑进行。实验以10张图片为单位,图片分辨率为1 024×768,图像格式为JPG,统计处理时间如表1所示。
3.4 识别误差原因分析
本文分光比和分光器端口识别误差主要由两方面原因造成:(1)由于1∶16分光比的分光器是由两排1∶8分光器叠放组成,因此实验中无法解析,降低了分光比识别的成功率。(2)由于运维人员将分光器接头乱搭乱放,给分光器端口识别造成了较大的干扰,降低了分光器端口识别的成功率。
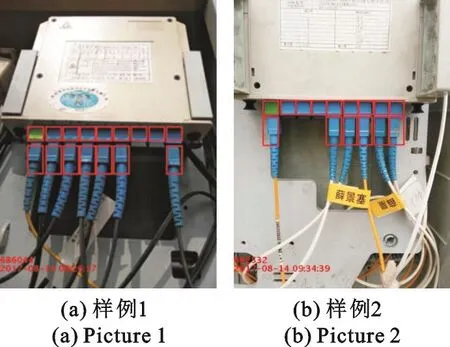
图9 拟TDI成像算法解析结果示例Fig.9 Results of the TDI-likely algorithm

表1 分光器端口解析算法运行时间Tab.1 Running time of splitter port analysis algorithm s
4 结束语
本文提出一种针对分光器端口的图像识别方法。实验分析表明,本文方法能够从分光器图片中自动解析分光器的端口信息,运行准确,运行速度满足实际需求,提高了对分光器的管理效率和把控能力,大大降低了人员投入,是资源数据平台数据质量提升的重要依据。下一步工作计划分别从分光器颜色和轮廓两方面进一步提高本算法对分光器外部环境的抗干扰能力,同时制定运维人员拍摄现场图片的规范,从根本上提升分光器端口识别的图像质量。
