无电压传感器的PWM整流器比例谐振控制研究
2019-02-25时维国
时维国,刘 晨
(大连交通大学,大连 116028)
0 引 言
目前,PWM整流器得到了广泛的应用。通过对PWM整流电路的适当控制,可以实现高功率因数、低谐波含量的要求。但是在传统的控制中,使用了较多的传感器,不仅增加了系统的成本,而且传感器也会带来检测误差。针对上述问题,国内外学者提出了虚拟磁链的概念。由于虚拟磁链的估算存在直流漂移的问题,学者们提出了各种解决的方法,如文献[1]提出了用一阶惯性环节代替纯积分,解决了纯积分带来的直流漂移问题,但是观测值仍然存在幅值和相位上的误差。
本文研究了一种新的磁链估算方法,即在纯积分环节后加入二阶广义积分环节,解决了磁链观测中的直流漂移问题,实验证明可以有效准确地观测虚拟磁链。
1 虚拟磁链观测原理
图1为三相整流器的主电路图,从整流器交流侧来看,其结构与交流电机结构非常相似。电阻R看作交流电机定子电阻,电感L看作定子漏电感,电网电压可以看作是由三相绕阻切割旋转磁场而产生的。由于此旋转磁场是不存在的,所以称之为虚拟磁链。
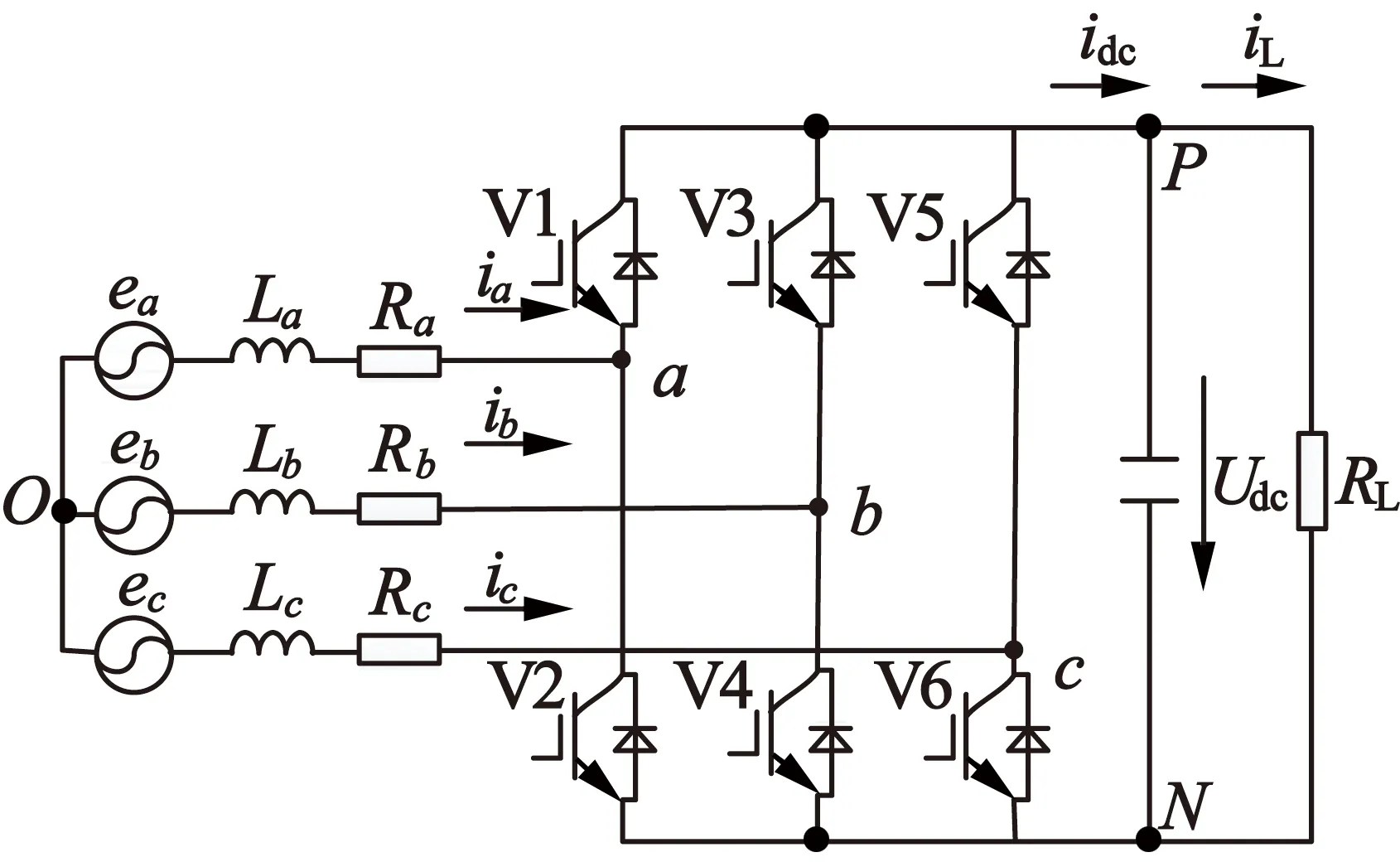
图1 三相PWM整流器主电路拓扑结构
虚拟磁链和电网电压存在以下关系:
(1)
设三相电压平衡,忽略线路电阻,推导出在α,β坐标系下的电压方程:
(2)
式中:eα,eβ分别为电网电压在两相静止坐标系下的分量;iα,iβ分别为三相电网电流在两相静止坐标系下的分量;L为滤波电感。
根据整流器交流侧输入电压与直流母线电压的关系,得到整流器交流侧输入电压公式[6]:
(3)
计算磁链是为了计算磁链角度,从而利用磁链角度和电网电压角度的关系,来推导出电网电压的角度。若由式(2)和式(3)直接计算电网电压角度会引入电流的微分,在实际控制中会放大噪声,引入干扰。结合式(1)和式(2),对式(2)左右两边同时积分,得到虚拟磁链的观测式[6]:
(4)
由式(4)得到的虚拟磁链角度计算公式[6]:
(5)
由式(4)、式(5)可知,由直流母线电压和交流侧电流就可以估算出磁链的幅值和角度,可以省去交流侧的电压传感器。
2 改进的虚拟磁链观测器
由式(4)可以看出,虚拟磁链的估算存在纯积分环节,而虚拟磁链的初始值位置,如果直接用式(4)估算磁链会引入与积分初值有关的直流偏置,导致虚拟磁链圆的圆心不在坐标原点,以此计算角度会带来较大的误差。本文为解决直流偏置问题,在纯积分后面加入改进的二阶广义积分环节,取得了良好的效果。
改进的二阶广义积分器传递函数如下[3]:
(6)
式中:k为增益系数;ω0为电网角频率。如果输入角频率为ω,可以得到该传递函数的幅频和相频特性:
(7)
由式(7)分析可得,当输入角频率ω0=ω时,|G|=1,说明经过此改进的二阶广义积分器,可以实现输入信号频率在ω=ω0时的幅值不变。同时,角度∠G=0,说明此信号相位也没有发生改变。因此在频率ω0处,经过此积分器的输入信号没有发生变化。
图2为此积分器的伯德图。由图2可知,G(s)为带通滤波器,与式(7)分析的相同,当ω0=ω时,输入信号可以无衰减地通过,在其它频率处输入信号均有不同程度的衰减,k值越小,衰减程度越大,相应的带宽也越小,对直流分量的抑制能力也越强,调节时间越长,工程中可以根据实际要求选择合适的k值。
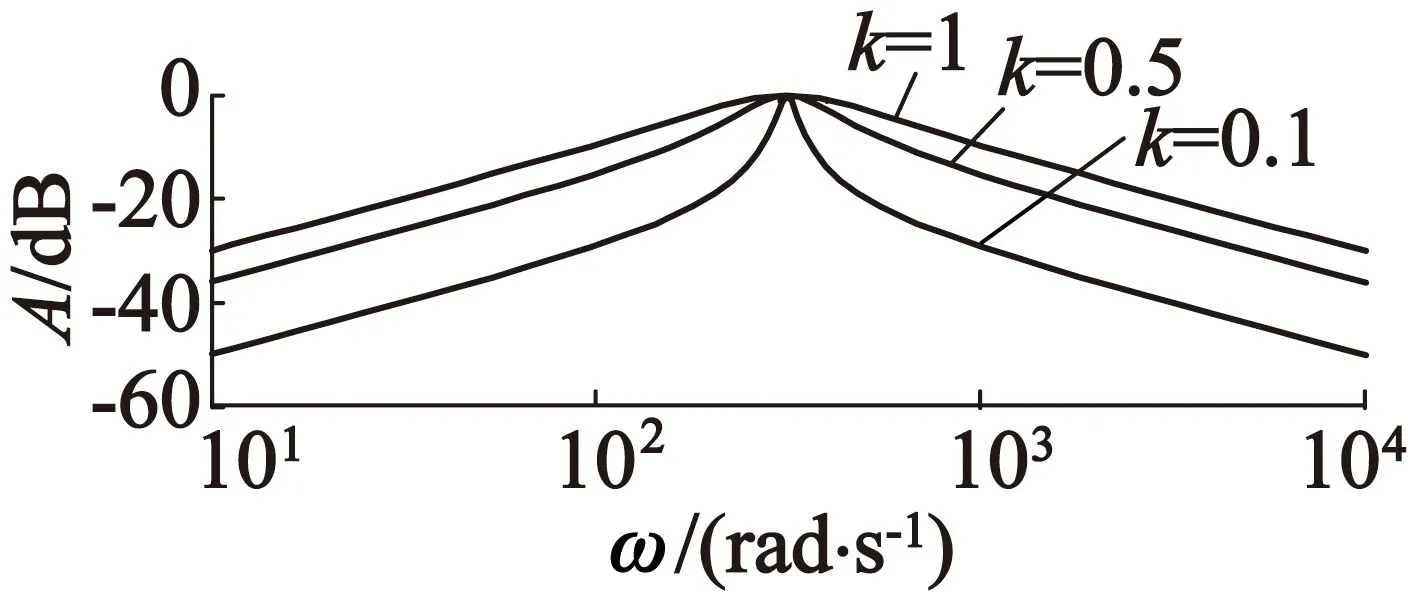
(a) 幅值
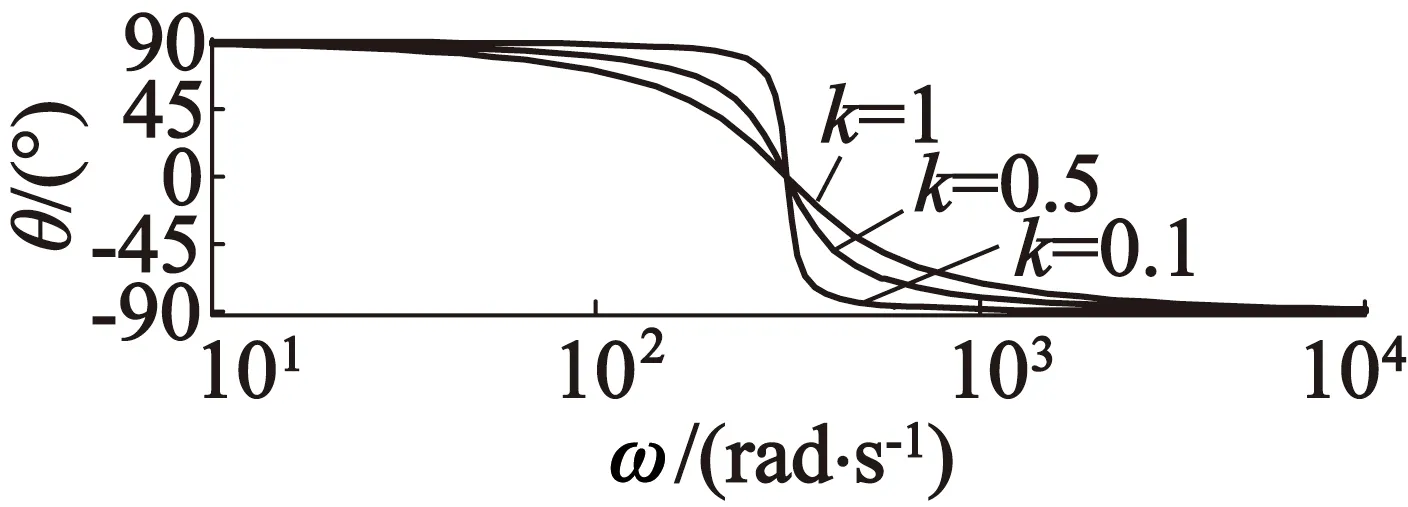
(b) 相位
图2改进积分器伯德图
虚拟磁链观测器输入输出关系如下:
(8)
对应的原理框图如图3所示。
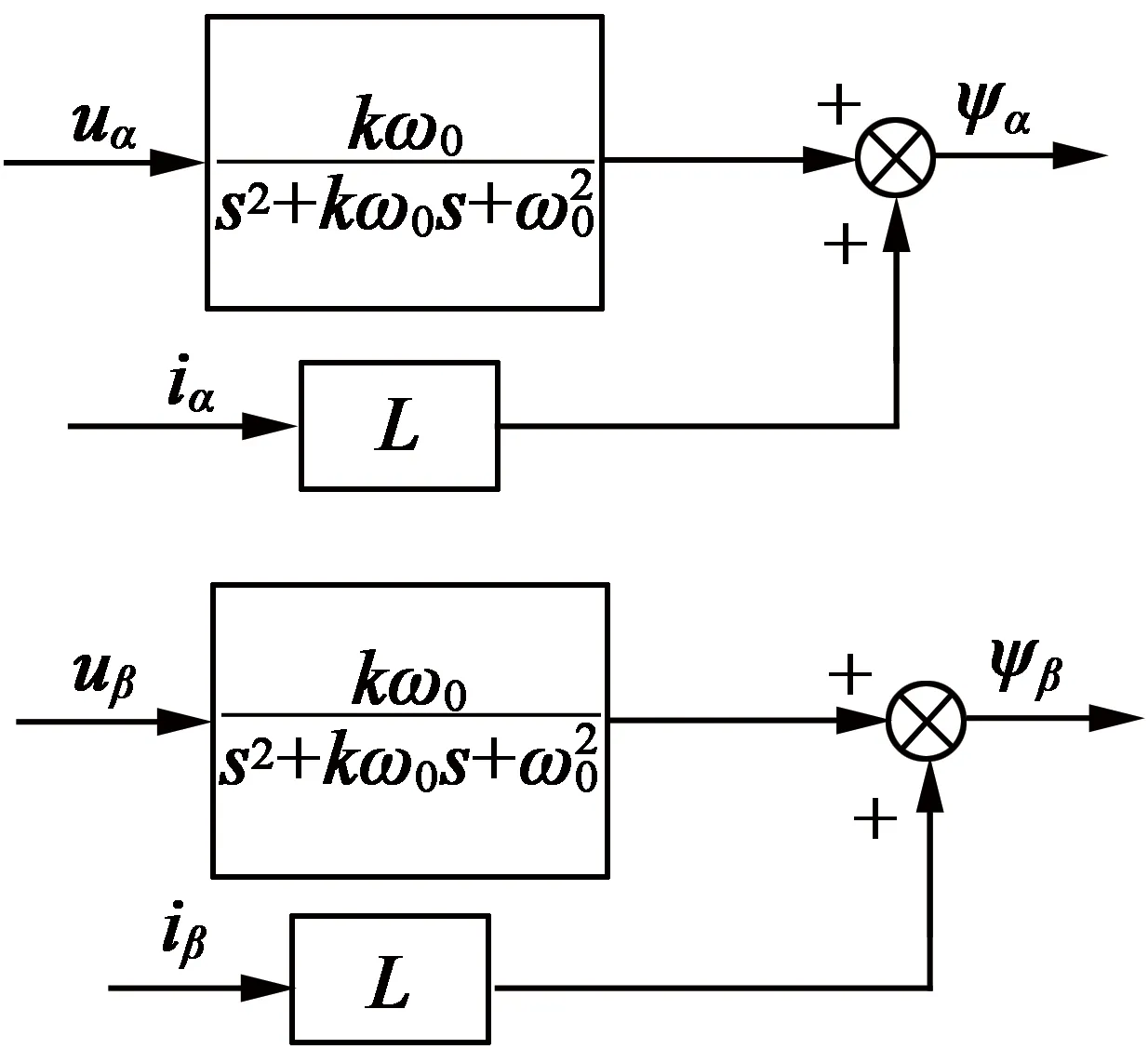
图3 虚拟磁链观测器原理框图

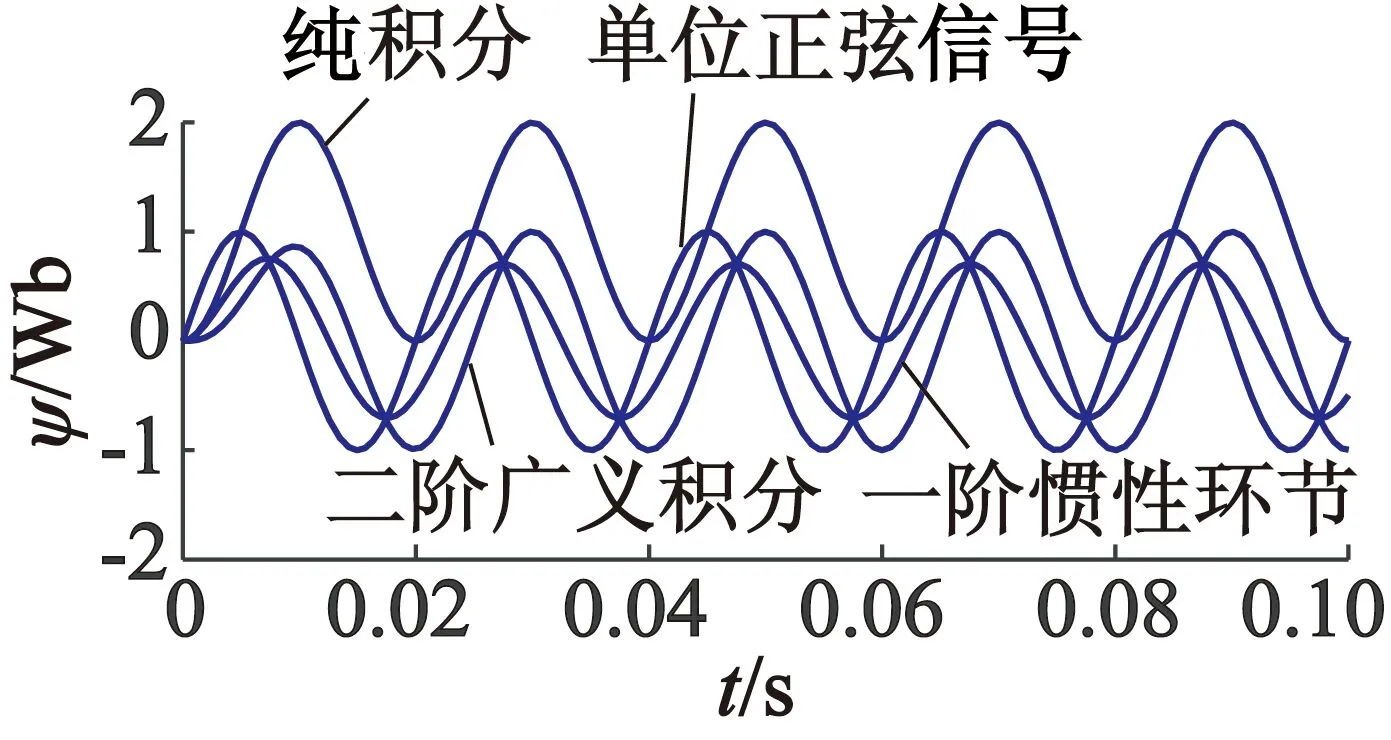
图4 电网电压初始相位为0时地磁链观测结果
3 基于改进虚拟磁链观测器的PR控制系统
为了验证改进虚拟磁链观测器的作用效果,现将其运用到PWM整流器控制系统中。同时,本文采用电压外环PI控制,电流内环PR控制的控制策略,简化了繁琐的坐标变化和解耦环节。无电压传感器三相整流系统控制框图如图6所示。

图6 无电压传感器三相整流系统控制框图
图6中,通过虚拟磁链观测来计算电网电压相位角,然后通过电流内环PR控制来实现PWM整流器的控制。
下面以α轴为例,介绍PR控制的参数整定方法[4]。图7为电流内环PR控制框图。
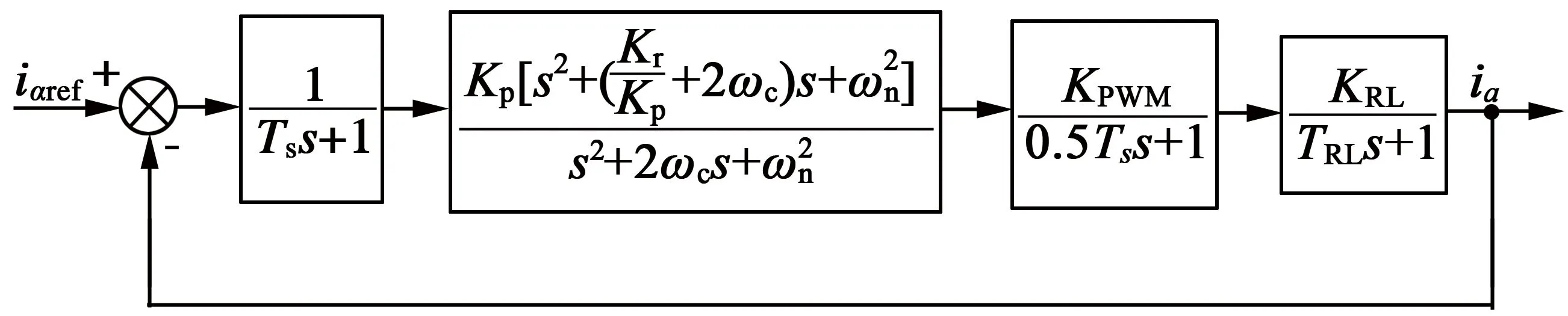
图7 电流环控制框图
将0.5Ts与Ts环节合并,可以得到两相静止坐标系下α轴电流环的传递函数:
(9)
(10)
本文选取的系统采样时间为Ts=0.000 2 s,交流侧电阻R=0.083 Ω,交流侧电感为5 mL,根据α轴下电流环的开环传递函数可以绘制出根轨迹图如图8所示。

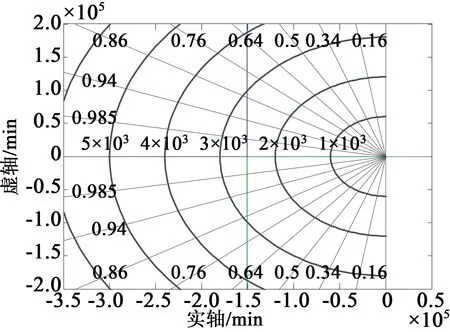
图8 电流内环的根轨迹图
4 系统整体仿真分析
以Simulink仿真工具构建了无交流电流传感器的三相PWM整流器准PR控制系统。仿真参数设置如下:交流侧线电压380 V,频率50 Hz,电感5 mH,电阻0.083 Ω,直流侧滤波电容1.6 mF,开关频率2 kHz,直流侧电压输入Udcref=500 V。
图9为整流器A相的电压和A相电流。从图9中可以看出,电压和电流的相位相同,因此可以实现单位功率因数控制。
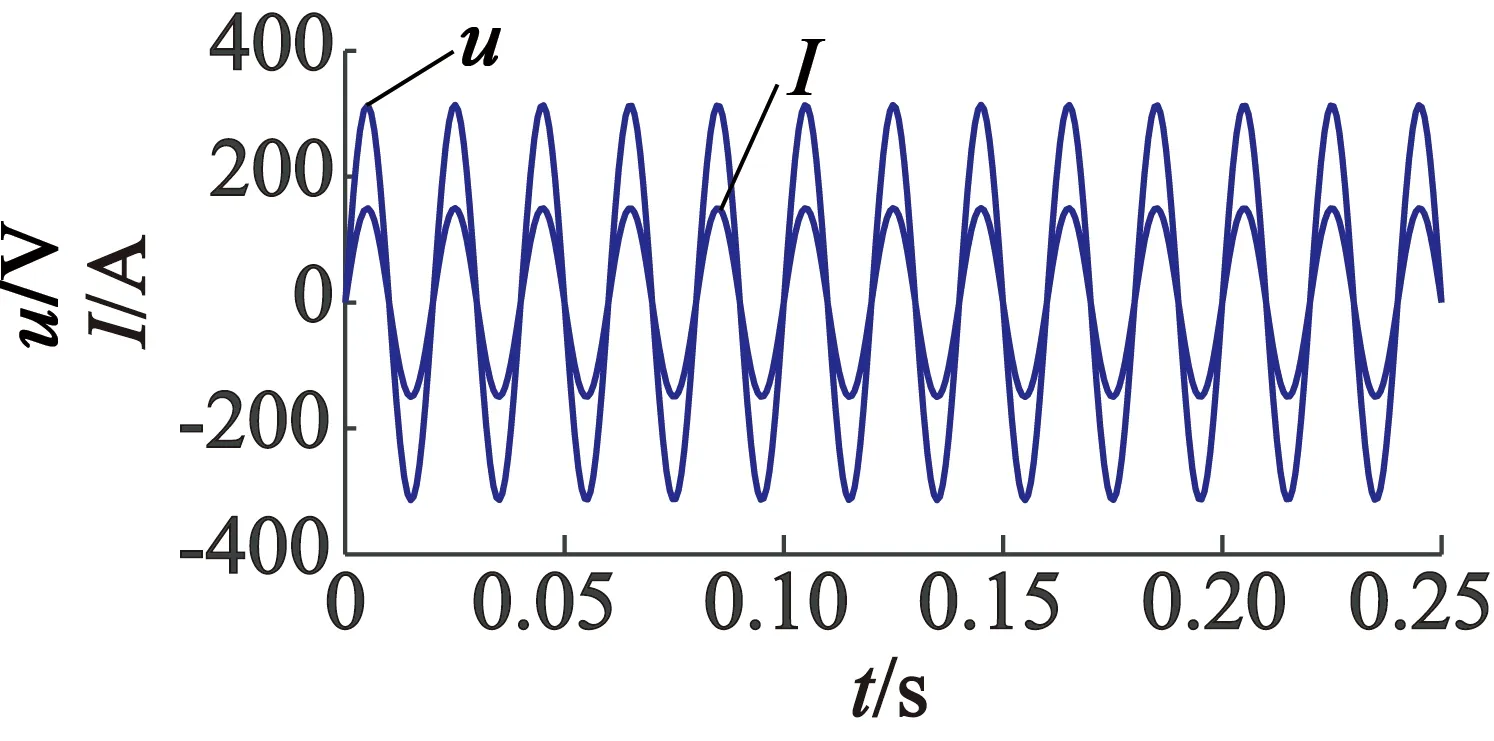
图9 A相电压与A相电流
图10为A相电流的FFT分析,从图10中可以看出,THD为2.81%,网侧电流畸变率较低,满足系统的控制要求。
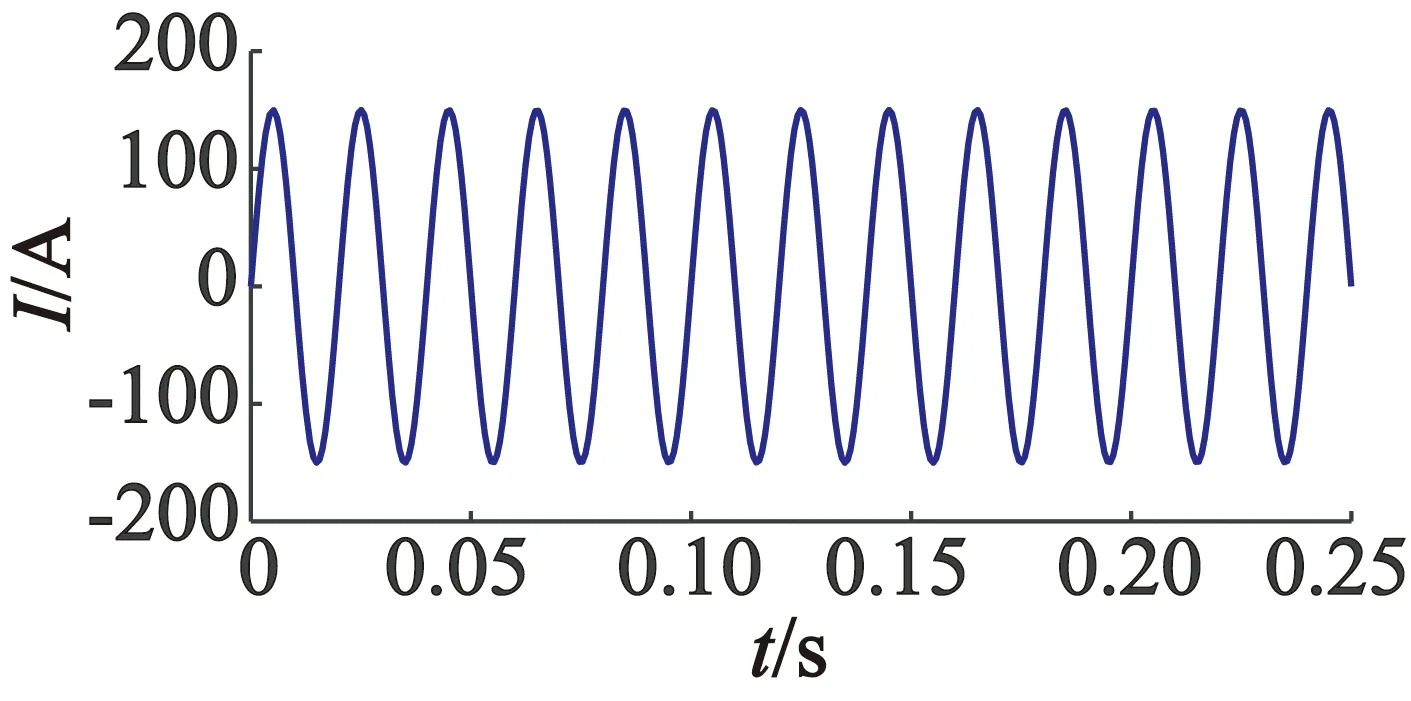
(a) A相电流
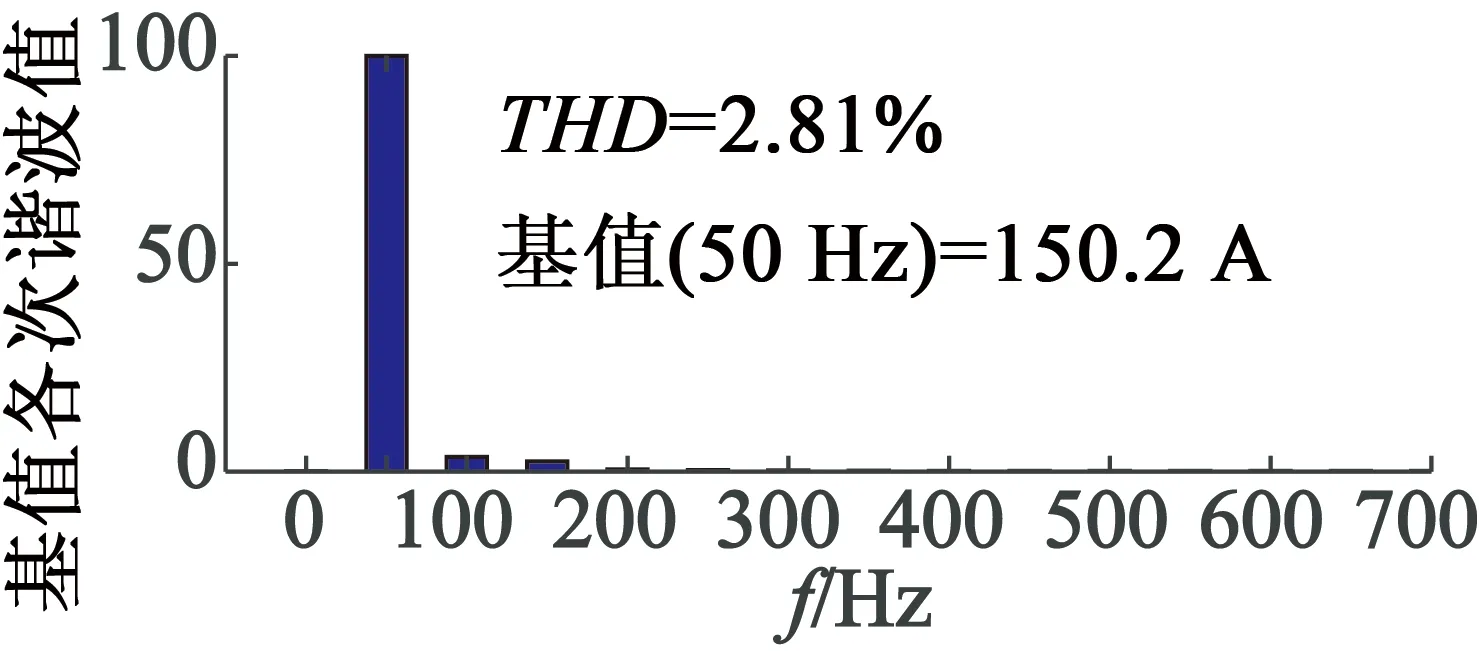
(b) FFT分析
图10A相电流与FFT分析
图11为直流侧电压输出波形。从图11可以看出,电压输出超调量小,动态响应速度快,且具有良好的稳态性能。图12表示负载电阻在0.12 s突变为原来的一半后直流母线电压的动态响应。从图12可以看出,母线电压很快恢复到500 V,无电网电压传感器的三相PWM整流器PR控制策略可以使整个系统稳态运行。
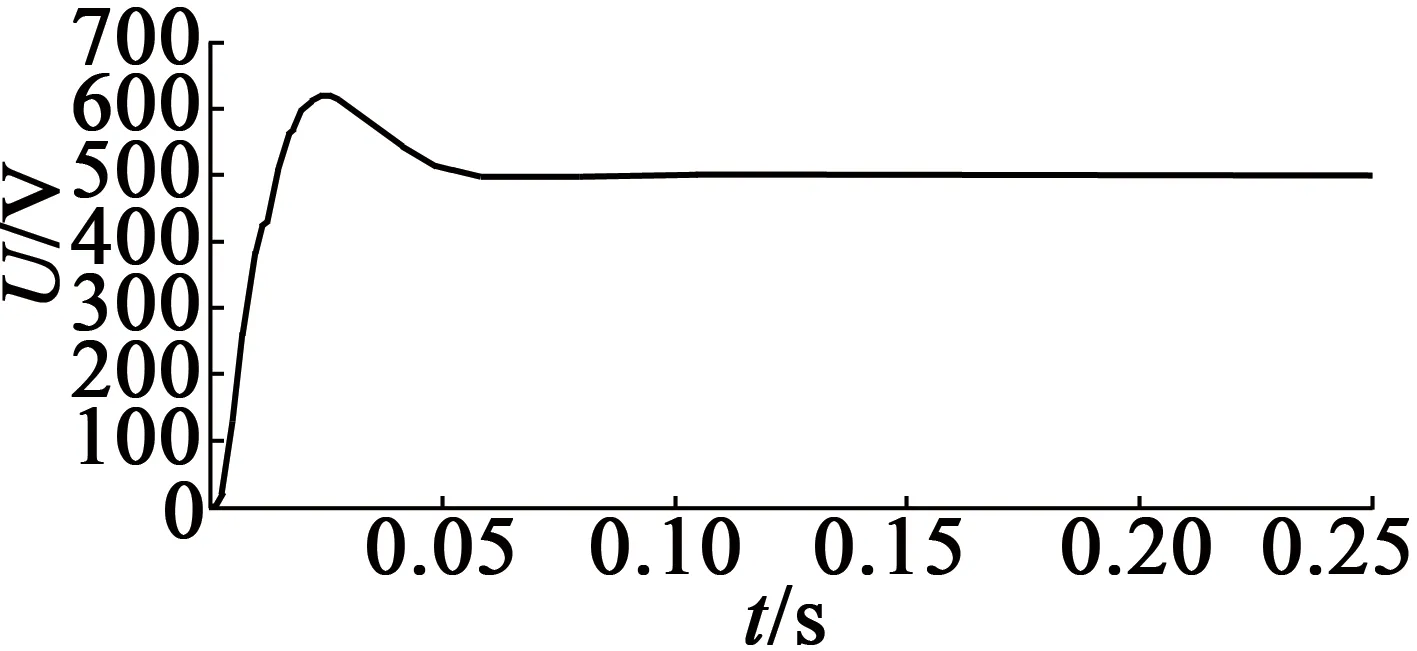
图11 直流母线电压输出波形
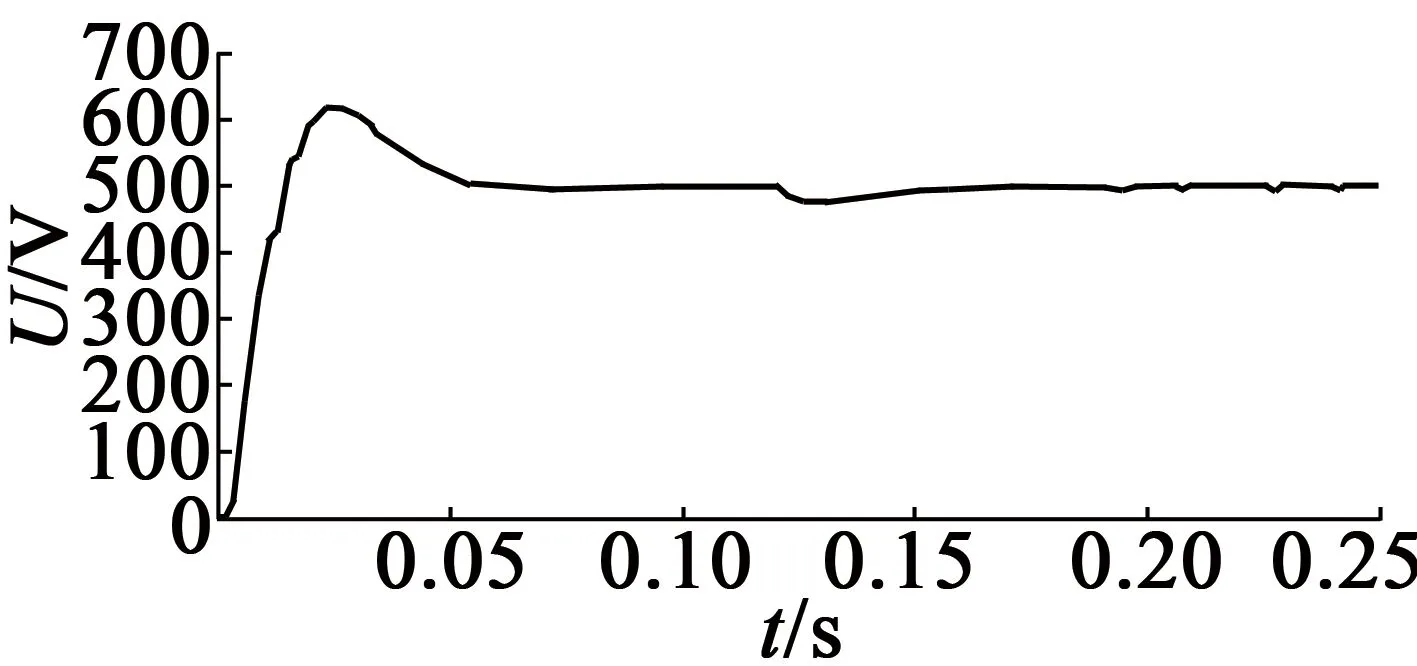
图12 负载突变下直流母线电压波形
5 结 语
本文研究了无电网电压传感器与两相静止坐标系下PR控制相结合的三相整流控制策略,节约成本的同时,准确地跟踪了指令信号,网侧电流谐波含量少。最后用MATLAB/Simulink实现了该控制策略的仿真,仿真结果验证了该方案的可行性。
