公共交通安全下基于变分贝叶斯期望最大化的扩展目标跟踪方法
2019-02-21王荣
王 荣
(宁夏大学新华学院 信息与计算机科学系,宁夏 银川 750021)
0 引 言
在公共交通监控检测中,运动目标的检测和轮廓描述为运动物体的定位提供了基本信息。但是,这些数据不是孤立的,因此必须跟踪运动目标。运动目标跟踪的关键技术是对所检测的受跟踪目标进行状态估计,即估计目标的形状、大小等信息。
传统的扩展目标跟踪算法一般均假定量测噪声的统计特性服从高斯分布,但很多情况下噪声参数(如量测噪声协方差)是未知的。另外,当目标进行不规则运动时,电磁波反射会产生一种新的噪声——闪烁噪声。对于闪烁噪声而言,它有一个重尾概率密度函数,特性完全不同于高斯噪声,因此必须考虑引入其他模型来描述[1]。
为了解决未知量测噪声的估计问题,一些近似算法被用来处理近似误差。文献[2-3]中分别采用加权最小二乘法识别噪声、用递推最小二乘算法来弥补噪声统计特性缺失的问题。最近,变分贝叶斯(VB)方法被用来近似未知的量测噪声协方差和目标状态的联合概率密度[4],EM算法对该近似分布中的参数进行估计。以此为基础,本文提出了一种闪烁噪声下基于变分贝叶斯期望最大化随机超曲面的扩展目标跟踪方法,并把它与CPHD滤波框架相结合。
1 扩展目标建模
假定k时刻的目标状态转移矩阵为xk=Fk-1xk-1+wk-1,其中xk=[mx,k,my,k,vx,k,vy,k,]T是扩展目标的运动状态,wk-1表示均值为0、协方差为Qk-1的高斯过程噪声,Fk-1表示状态转移矩阵。
由椭圆随机超曲面模型(RHM)可知,量测z可看成是位于椭圆内的一个点,且此椭圆的定义如下:

其中,mk=[mx,k,my,k]T,Ak是一个半正定的形状矩阵。假定扩展目标每一时刻产生nT个量测,可表示为:

由于量测模型是非线性的,因而无迹变换被用来处理跟踪问题。此时,状态x增补为相应的其均值和协方差为:
其中,xk的均值为 μk,sk~N(),表示未知的量测噪声协方差。
2 基于VBEM的扩展目标跟踪算法
步骤1:预测。扩展目标CPHD滤波中的预测即是对目标状态、量测噪声逆协方差以及自由度(下文称为联合PHD)进行迭代。由文献[5-6]可知,联合PHD可以写成:

其中,DS,k|k-1(x,R,v)、DB,k(x,R,v)分别表示存活目标以及新生目标的联合预测PHD。它的表达式和相关参数计算可参考文献[7]。
VBE步:
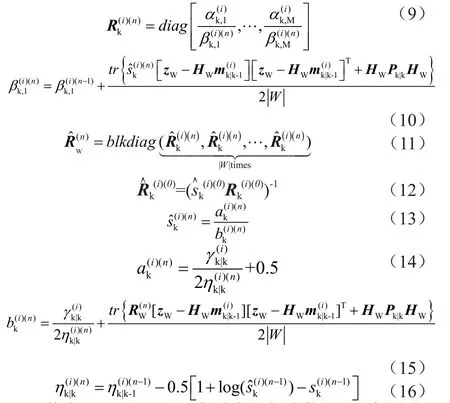
其中,n=1,…,N,N为最大迭代次数。对目标状态、状态协方差矩阵的更新公式具体可参考文献[1]。
VBM步:
可以得到下面的似然函数:
最终,根据前后两次迭代的似然是否满足式(22)来判断是否终止迭代。

其中,Lold为上一次迭代的似然,Lnew为当前似然,convcrit是经验阈值。
3 仿真实验
此处考虑二维平面中有两个目标的情况,这两个目标在观测区域均运行了40个时刻。在前10 s,两个目标均以匀速朝东前进;接下来的10 s,两个目标以4.5 °/s进行转弯,并保持匀速;接下来的20 s,匀速朝东前进。相关参数设置如下:

从图1~图4可以看出,所提算法可以精确估计目标的中心位置。对于传统算法,一旦量测噪声协方差距离真实值偏差很大,目标跟踪精度将会急剧下降。在第25时刻,由于目标出现交叉现象,导致目标数目出现漏估,但是在其他目标相距较近时刻,所提算法仍有一个较高的估计精度。

图1 估计目标轨迹
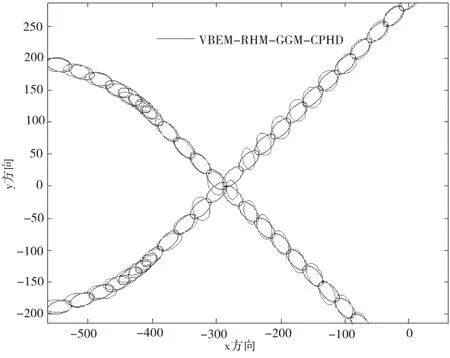
图2 放大图
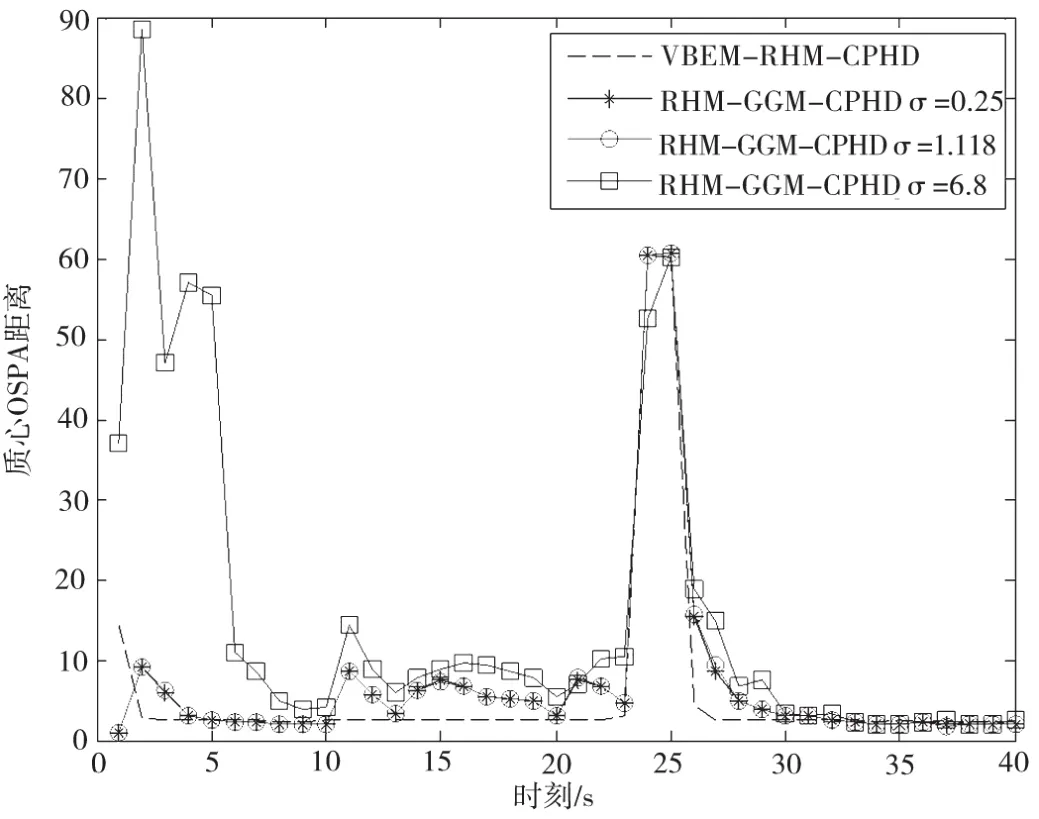
图3 质心OSPA距离

图4 目标数目估计对比
4 结 论
公共交通安全下,近年来基于随机集目标跟踪理论受到了越来越多的关注。本文针对闪烁噪声存在的特殊情况,通过改进CPHD滤波器,提出了一种基于VBEM-RHM的扩展目标跟踪算法。实验仿真表明,所提算法比传统算法具有更高的跟踪精度。