基于多自由度机器人的电力线巡检研究
2019-02-21李济时
魏 伟,杨 帅,李济时
(沈阳科技学院 信息与控制工程系,辽宁 沈阳 110000)
0 引 言
电力行业是人们基础生活的保障,因此,其安全性是至关重要的[1]。输电线路是电网的重要组成部分之一,线路巡检能够保证输电线路安全的运行,能够及时发现电力线的安全隐患,预防电力线故障的发生,或者缩小故障发生的范围。
随着机器人技术的发展,利用机器人对电力线路进行安全巡检备受关注,也是当前电力线巡检技术的发展趋势。基于此,提出了基于多自由度机器人的电力线巡检研究。
1 电力线巡检技术框架
根据电力线路巡检的要求,确定多自由度机器人需要获取的信息和作业方式[2]。图1为电力线路巡检技术框架。

图1 电力线路巡检技术框架
2 电力线巡检作业流程
多自由度机器人电力线巡检分为三个步骤,需要先对原始的数据进行采集,制作机器人电力线路巡检的任务计划。再通过快速巡检的模式获取相关几何位置信息、数字地形模型、线路激光点云等相关信息。然后利用获取的激光点云等制作巡检任务计划,为后续对电力线路进行故障诊断和分析做准备[3]。
控制器主要根据传感器传输信号判断多自由度巡检机器人的具体位置,然后根据具体位置对其进行控制,给出左右机械臂的运行速度差。对速度进行规划后可以确保多自由度巡检机器人整体速度不变,使其多自由度巡检机器人趋于稳定。在这种情况下,确定巡检机器人左右机械臂的理想运行速度,实现多自由度巡检机器人的速度闭环控制。
3 基于多自由度机器人的电力线巡检研究
根据上述电力线巡检需求,设计了一种多自由度电力线巡检机器人。电力线巡检机器人主要依附在高压输电线上进行作业,与普通机器人不同,巡检机器人的运动形式会受到电力线的影响,会对巡检机器人的运动形式形成阻碍。因此,要根据具体的巡检环境和作业内容对巡检机器人进行设计。
3.1 结构和越障机构设计
电力线巡检机器人的每个关节视为一个自由度来进行计算,本文设计的多自由度机器人共有5个自由度。主要是通过机械臂旋转方式跨越电力线中的障碍。具有三个机械臂,可以进行相对旋转运动,对障碍物进行跨越。多自由度机器人在跨越障碍物时,主要通过机械臂中的旋转机构来实现。其中的升降机构可以和旋转机构完美合作,对驱动机构和夹紧机构进行驱动,使其在电力线上进行转动和移动,从而成功跨越障碍物。多自由度机器人工作时主要是由驱动机构提供动力,升降机构来提供支撑动力。
多自由度机器人的核心机构是越障机构。越障机构设计主要包括旋转机构、升降机构、驱动机构和夹紧机构,本文主要介绍旋转机构和夹紧机构的设计。
3.2 多自由度机器人在电力线巡检中的利弊
利用多自由度巡检机器人进行电力线巡检工作时,能够自动进行巡检,自动跨越障碍物进行巡检。通过预先对机器人进行设置,能够准确的收集可见光图像等重要信息,并且存储在机器人中,为后续工作做准备。在巡检结束后,工作人员只需对机器人收集到的信息进行分析,并进行相应的处理,从而准确的找到故障所在。但是,在使用过程中也存在一定的弊端,由于电力线巡检机器人的技术还不够完善,因此,当机器人出现故障时,维修时间和费用相对较高。图2为多自由度机器人的巡检过程图。

图2 多自由度机器人巡检过程
4 实验结果与分析
为了保证多自由度机器人的有效性,需要设计实验对其进行验证。在实验过程中,将多自由度机器人作为实验对象,观察实验对比结果。在实验过程中,将传统巡检机器人称为对照组,设计的巡检机器人称为实验组。
4.1 数据准备
为了尽可能保障实验结果的准确性,需要对实验过程中的参数进行相应设置,本文采用的是两种不同的巡检机器人对电力线进行巡检。因此,在实验过程中必须保证外部环境参数的一致。实验参数设置结果如表1所示。
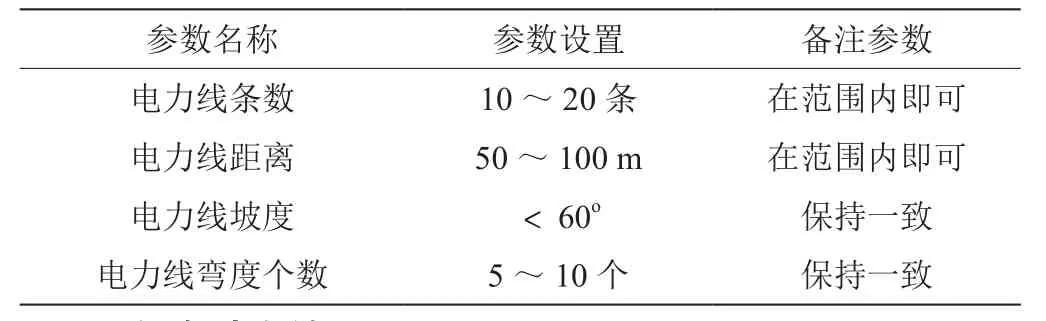
表1 实验参数设置结果
4.2 实验对比结果
在实验过程中,由于采用的巡检机器人不同。因此,引用第三方软件对其实验数据进行记录和分析。主要通过巡检机器人巡检速度验证机器人的有效性。实验对比结果如图3所示。

图3 实验对比结果
如图3所示,实验组巡检速度均高于对照组。实验组巡检速度最高值达到50 m/min,平均速度可以达到40 m/min。而对照组巡检速度最高值为23 m/min,平均速度为15 m/min。由曲线和数据均可以看出,实验组巡检速度比对照组的高出25 m/min,说明多自由度巡检机器人具备极高的有效性。
5 结 论
综上所述,分析了电力线巡检技术,根据电力线巡检需求设计了多自由度巡检机器人,并进行实验验证。虽然在巡检速度上有了质的提高,但是,依然有很大的进步空间,需要对其进行进一步的研究。